嵌入式點膠控制系統人機界面設計
2019-10-09 05:25:26鄒連英于寶成
自動化與儀表 2019年9期
鄒連英,高 寧,于寶成
(1.武漢工程大學 電氣信息學院,武漢430205;2.武漢工程大學 計算機科學與工程學院,武漢430205)
點膠是一種生產工藝,最主要的應用是在LED封裝領域,是其關鍵生產環節之一,除此之外還廣泛應用于電子封灌、平面密封、網格膠帶、PCB 保護、螺紋密封等領域[1-3]。 點膠機可以將膠水或其他溶液點滴到目標物體上,將目標物體固定,準確而快速的點膠控制能夠基本滿足裝貼需要。 本設計提供了功能完善、開發友好的操作界面解決方案。
當前市場上既有成本十分昂貴、性能非常優越的智能點膠機,也有便宜、性能一般、操作基于旋鈕式的點膠機[4]。 采用四軸運動控制卡+IO 卡+工控機(主機和顯示器)+伺服系統是目前比較流行的自動點膠機控制方案。 這種方案的缺點在于成本高,設備體積龐大,設備啟動速度慢,開發周期長,需要強大的硬件和軟件開發團隊的支持[5-7]。 本次設計的方案優點在于界面友好方便操作人員學習且便于維護,系統構成簡單,成本較低,性價比較高,運行可靠。
1 點膠機系統結構
觸摸屏與主控芯片之間的通信由USART 串口實現,連線簡單[8-9]。 嵌入式智能點膠機系統的硬件結構如圖1 所示。 主控芯片和伺服電機驅動器之間的連接可以有RS232 通訊方式、CAN 總線通訊方式和外部脈沖控制方式,由工作環境確定[10]。在比較惡劣的工業環境下,多用外部模擬量輸入控制方式,由主控芯片引腳輸出PWM 波到驅動器來控制電機的工作。 伺服電機外接24 V 電源和GND,電機的控制和反饋通過三相編碼器和驅動器連接其接口實現。
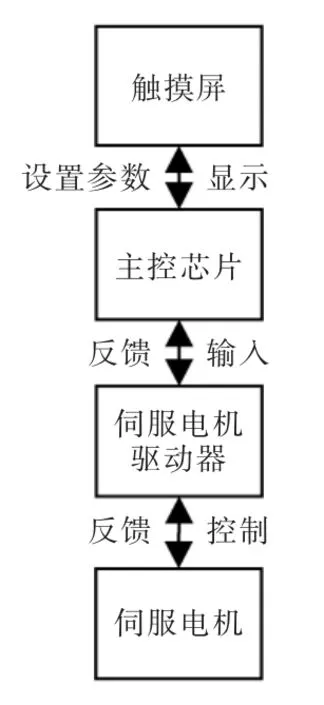
圖1 系統硬件結構圖Fig.1 System hardware structure diagram
1.1 主控芯片的功能和選型
主控芯片負責調度系統的模塊功能,主要負責系統的控制、通訊、存儲。 控制功能包括控制電機啟停、系統任務的中斷和管理、異常處理等。 通訊功能實現主控芯片與觸摸屏之間的交互,觸摸屏的主要控制關鍵開關量以及狀態顯示。 因此,本控制系統采用串口通信的方式實現觸摸屏和主控芯片之間的交互,將得到的控制信號通過RS232 經過特定的協議輸入到伺服驅動器中。 存儲功能主要用來記錄系統運行的重要信息,如開機時間、異常狀態信息等[11]。 基于嵌入式的點膠控制系統屬于實時控制系統,控制器需要高速實時地進行高速處理,同時還需有一定的存儲能力。
STM32F407 芯片工作頻率高達168 MHz,擁有4 個USRAT 串口接口可以用來通信,2 個PWM 定時器用于電機脈沖模式控制,多達1 MB FLASH 可以用來存儲歷史信息。 本設計使用2 個串口模塊用來通信,通過D-Code 數據總線來訪問STM32F4 內部閃存模塊存取歷史信息。 STM32F4 系列芯片能夠滿足本設計對運算性能、存儲能力和可擴展性的要求。
1.2 點膠機控制
1.2.1 現有點膠系統的控制方法
點膠系統控制器是用來聯通機器平臺與點膠閥的紐帶,用來控制點膠閥開關。 這些控制器根據點膠機控制閥的不同分為不同種類,但大多數控制器與操作人員的信息交互的方式采用LED 顯示參數、旋鈕或按鍵設置參數,可操作性十分有限[12]。
1.2.2 伺服系統和點膠泵控制
本設計針對低成本應用場景,采用高性價比伺服控制解決方案,在確保穩定可靠的前提下選擇低壓交流伺服系統。 和普通的步進電機系統相比,噪聲低、轉速高、發熱小、恒力矩輸出、不丟步;和步進伺服電機系統相比,功能、性能和可靠性更好。 低壓交流伺服系統滿足出膠控制精準,保證出膠的穩定可靠的要求。
螺桿泵點膠在目前的接觸式膠液分配系統中被普遍采用,螺桿泵點膠具有膠量易控制、適宜不同粘度的膠液和成本較低等優點[13]。 螺桿泵是最終完成點膠的部件,膠液儲存在物料區,在電機施加的恒定壓力下被推吸到螺桿段,螺桿通過伺服電機驅動開始旋轉,螺桿旋轉推動膠液在螺槽內往外滑動, 膠液最終從針頭擠出, 并與目標物體接觸、拉斷,最后在目標物體上留下一定量的膠粒,完成點膠。 在此過程中螺桿運動參數在觸摸屏上設置,是控制出膠量的主要因素,螺桿結構參數和針頭尺寸只能預先設好。 本設計采用螺桿點膠泵實現點膠功能,其動力驅動采用高分辨率的步進電機,精準控制所需出膠量。
2 人機界面設計
設計一個便于用戶實際操作的人機交互界面往往能提高控制系統的實際應用價值。 人機界面主要顯示點膠機當前工作狀態并通過串口通信實現與伺服電機驅動器數據的交換,為操作人員提供可操作的界面。 這個人機交互界面應該有必要的引導功能,對操作人員友好,美觀易懂、能向主控芯片傳遞輸入的參數以及能實時顯示控制設備的狀態。
2.1 觸摸屏的選型
并口屏通常采用8 位或16 位的并方式與外部連接。并口屏能對顯存直接操作,并口屏實時放映速度相對串口屏更快,抗干擾不是很強,適合速度高但是顯示圖片比較簡單的環境。 并口屏成本較低,實現功能簡單,但并口的方式會耗費控制器很多資源,主控芯片性能不佳且事務繁雜不宜采用并口屏。 并口屏的開發需要工程師對液晶屏的文件管理和顯示原理有了解,開發進度慢,產品升級不方便,處理圖片、文字等工作要工程師自己來做,一般要有很好的研發基礎,否則開發出來的產品穩定性不高。
串口屏通過串口(USART 232)與主控芯片進行通信來控制顯示屏。 串口屏開發起來較簡單,但是反應速度比不了并口屏,刷新整個屏幕的速度會比較慢。 單片機通過協議來控制液晶顯示內容,對單片機系統本身性能要求不是很高,但串口屏會占用單片機串口資源。 只需編寫串口通信程序就可實現菜單、文字、圖片操作,對研發人員要求低,開發周期要快很多,但價格相對并口屏會高一些。 工業上一般串口屏比并口屏用的多,畢竟串口屏操作簡單快捷,編寫程序代碼也比較簡單,串口通信也比并口的傳輸速度快,這里選擇串口屏作為觸摸屏設備。
2.2 人機界面的功能與結構設計
對觸摸屏進行設計,將設計好的頁面,控件下載到觸摸屏設備中, 集成觸摸屏下內置一塊芯片,界面的顯示是觸摸屏設備內部實現的,主控芯片不需要底層驅動, 底層功能都由觸摸屏設備封裝好。點擊某個按鈕,在觸摸屏改變內容的同時,會發送指令到主控芯片,通過程序計算或選擇,返回指令到觸摸屏,改變屏上的狀態或某個值,在這個過程中發送和返回的指令格式均可以按主控芯片設定好的格式來收發,方便了用戶的開發。 受限于篇幅,這里僅展示觸摸屏主頁、 菜單和人機界面結構圖,如圖2~圖4 所示。

圖2 觸摸屏主頁界面圖Fig.2 Home interface diagram of touch screen

圖3 觸摸屏菜單界面圖Fig.3 Menu interface diagram of touch screen
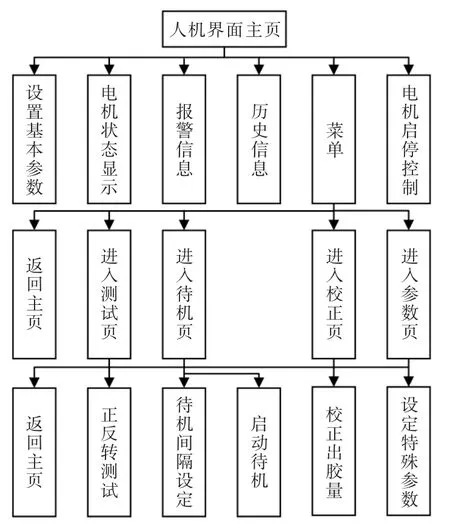
圖4 人機界面結構圖Fig.4 Human-machine interface structure diagram
圖2界面為主頁,左上方7 個小工具為狀態顯示,輸出系統的狀態信息;中間2 個報警裝置顯示報警信息;右上方3 個按鈕分別用來跳轉到相應界面;左下方表示已設定好的有關值;右下方表示歷史的報警信息。 點擊菜單跳轉到菜單界面。 菜單頁面下還能設計擴展的功能按鍵,當機器出現某種異常情況的時候,人機界面自動彈出報警信息,工作人員找到問題并對設備進行檢修。
圖3 界面為菜單,左上方4 個小工具為控制按鈕,右上方輸出模塊的狀態信息,下方的7 個按鈕分別用來切換到 “主頁”、“測試”、“待機”、“校正”、“參數”、“監視”界面。
圖4 為人機界面結構圖,主頁和菜單的功能框圖可以在圖2 和圖3 中找到模塊。 點擊主頁中的菜單則進入更深一級的頁面選擇,這些頁面都有其特定功能。 以上結構框圖描述的功能基本能夠滿足一個點膠機操作人員能夠對機器進行的所有操作,功能完整且界面友好。
3 系統調度軟件設計
整個系統的調度和參數的傳遞主要是通過主控芯片來控制,主控芯片通過串口數據線控制下位機并更新觸摸屏顯示。 點擊觸摸屏上不同的按鍵時,觸摸屏傳遞相應的信號到主控芯片,主控芯片整理信號并發送指令控制下位機。 主控芯片觸摸屏操作的工作流程如圖5 所示。
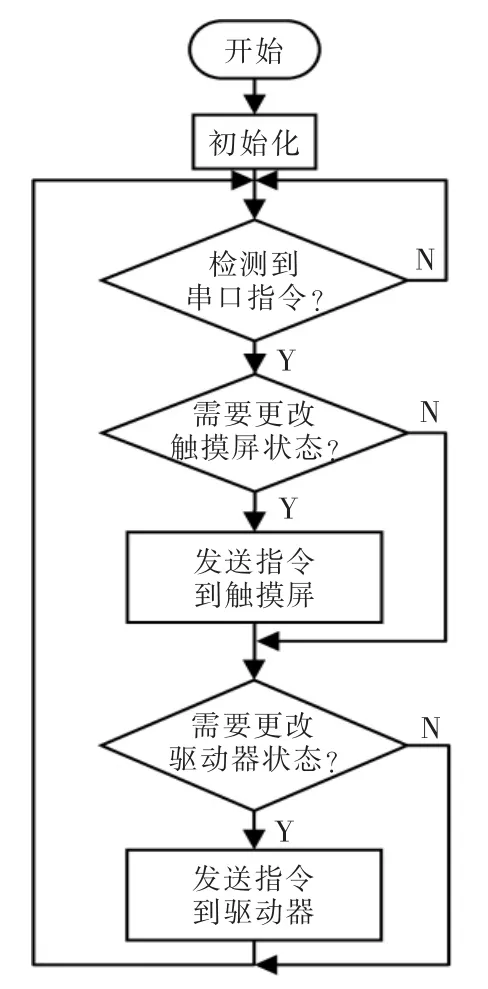
圖5 主控芯片工作流程圖Fig.5 Flow chart of main control chip
圖中指令的轉換和發送過程的程序由主控芯片控制并通過串口傳輸,其中指令轉換的代碼還可拆解為觸摸屏更新操作和伺服電機驅動器的控制操作,實際的操作過程會一直檢測串口指令。 點膠機系統開機時系統調用初始化函數,觸摸屏進入主頁。 主頁函數中檢測串口指令,檢測到串口指令后由主頁上的菜單項進入其他下級功能頁面,此功能由主控芯片通過狀態機語句實現。 在每個頁面的函數體中檢測驅動器發來的反饋信號,發生報警時進入中斷服務函數,在觸摸屏上顯示報警。 步進電機的啟停、轉速和運動方向都由伺服電機驅動器接收到的脈沖信號控制,根據脈沖信號模擬量通過改變速度參數值控制電機轉速;脈沖信號起始的高低電平決定方向,驅動器根據接收到的方向信號,修改當前方向控制位的電平狀態,控制電機轉向。
4 系統調試結果
本次調試主要根據設計的界面,點擊界面上的按鈕,觀察觸摸屏按照指定要求工作的情況。 點擊圖2 參數旁邊的“+”或“-”設置參數然后點擊運行,電機按給定的量正常運行10 s,,利用精密微量天平稱量10 s 內擠出膠液的質量將其與給定量進行對比,結果表明誤差在3%左右。 點擊待機按鈕,電機從任意狀態停止運行。 點擊菜單按鈕,觸摸屏從主頁切換至菜單頁面, 菜單頁面下有其他功能按鍵,分別可以進入到不同的功能界面,通過在觸摸屏輸入參數也可以達到控制電機參數的效果。 這種頁面切換式的操作方式讓人一目了然,使用方便,運行調試結果說明在該點膠機系統能夠基本達到預期顯示和控制效果。
5 結語
本次設計方案主要針對市面上主流的點膠機系統提供人機操作界面方案優化,對于操作人員更加友好易于維護, 容易輸入參數和觀察異常報警。在效率、成本、功能和可操作性等方面進行了綜合考慮后,提出了觸摸屏界面的設計并簡要介紹了關鍵部分的功能和實現。 相比一般工廠使用的半自動化按鈕式或者單頁面式的人機界面,本文提出的人機界面設計方案功能齊全、結構簡單,方便了操作人員,而且具有范圍很廣的可擴展性,除了可以運用在點膠機上,同樣可以運用到其他中小型工作模式類似的儀器上。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04