車載智能計算基礎平臺參考架構1.0(2019 年)
2019-10-09 07:04:41
中國計算機報 2019年31期
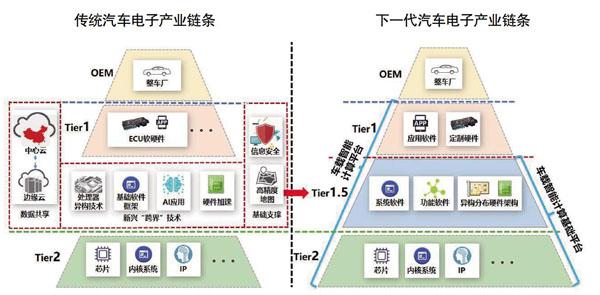
汽車產業是我國國民經濟的重要支柱產業,是推動實現制造強國和網絡強國建設的重要支撐和融合載體。在“新四化”背景下,汽車電子電氣架構正在由分布式向集中式持續演進,自動駕駛成為產業競爭的焦點,汽車電子產業鏈和技術鏈面臨重構。在此背景下,對于支撐實現自動駕駛功能的車載智能計算平臺而言,其重要性更加凸顯。國內外企業都在積極布局,加快推進產品研發和應用示范。
車載智能計算基礎平臺參考架構概述
參考架構總體框架
車載智能計算基礎平臺需要軟硬件協同發展促進落地應用。車載智能計算基礎平臺結合車輛平臺和傳感器等外圍硬件,同時采用車內傳統網絡和新型高速網絡(如以太網、高速CAN 總線等),根據異構分布硬件架構指導硬件平臺設計,裝載運行自動駕駛操作系統的系統軟件和功能軟件,向上支撐應用軟件開發,最終實現整體產品化交付。
車載智能計算基礎平臺參考架構主要包含自動駕駛操作系統和異構分布硬件架構兩部分。其中,自動駕駛操作系統是基于異構分布硬件架構,包含系統軟件和功能軟件的整體基礎框架軟件。車載智能計算基礎平臺側重于系統可靠、運行實時、分布彈性、高算力等特點,實現感知、規劃、控制、網聯、云控等功能,最終完成安全、實時、可擴展的多等級自動駕駛核心功能。
參考架構軟硬件特點
異構。車載智能計算基礎平臺需采用異構芯片硬件方案。面向L3 及以上等級自動駕駛車輛,車載智能計算基礎平臺需兼容多類型多數量傳感器,并具備高安全性和高性能。現有單一芯片無法滿足諸多接口和算力要求,需采用異構芯片的硬件方案。異構可以體現在單板卡集成多種架構芯片,如奧迪zFAS集成MCU(微控制器)、FPGA(現場可編程門陣列)、CPU(中央處理器)等;也可以體現在功能強大的單芯片(SoC,系統級芯片)同時集成多個架構單元,如英偉達Xavier集成GPU(圖形處理器)和CPU兩個異構單元。
現有車載智能計算平臺產品如奧迪zFAS、特斯拉FSD、英偉達Xavier等硬件均主要由AI(人工智能)單元、計算單元和控制單元三部分組成,每個單元完成各自所定位的功能。
分布彈性。車載智能計算基礎平臺當前需采用分布式硬件方案。當前汽車電子電氣架構由眾多單功能芯片逐漸集中于各域控制器,L3及以上等級自動駕駛功能要求車載智能計算基礎平臺具備系統冗余、平滑擴展等特點。一方面,考慮到異構架構和系統冗余,利用多板卡實現系統的解耦和備份;另一方面,采用多板卡分布擴展的方式滿足自動駕駛L3及以上等級算力和接口要求。整體系統在同一個自動駕駛操作系統的統一管理適配下,協同實現自動駕駛功能,通過變更硬件驅動、通信服務等進行不同芯片的適配。
車載智能計算基礎平臺需具有彈性擴展特性以滿足不同等級自動駕駛需求。針對L3及以上等級自動駕駛汽車,隨著自動駕駛等級提升,車載智能計算基礎平臺算力、接口等需求都會增加。除提高單芯片算力外,硬件單元也可復制堆疊,自動駕駛操作系統彈性適配硬件單元并可進行平滑拓展,達到整體系統提升算力、增加接口、完善功能的目的。
車載智能計算基礎異構分布硬件架構
車載智能計算基礎平臺硬件架構指導異構芯片板級集成設計。該架構具有芯片選型靈活、可配置拓展、算力可堆砌等優點。硬件主要包括AI單元、計算單元和控制單元。
AI單元
AI單元采用并行計算架構AI芯片,并使用多核CPU配置AI芯片和必要處理。AI芯片可選用GPU、FPGA、ASIC(專用集成電路)AI芯片等。當前完成硬件加速功能的芯片通常依賴內核系統(多用Linux)進行加速引擎及其他芯片資源的分配、調度。通過加速引擎來實現對多傳感器的數據高效處理與融合,獲取用于規劃及決策的關鍵信息。AI單元作為參考架構中算力需求最大的一部分,需要突破成本、功耗和性能的瓶頸以達到產業化要求。
計算單元
計算單元由多個多核CPU組成。計算單元采用車規級多核CPU芯片,單核主頻高,計算能力強,滿足相應功能安全要求,裝載Hypervisor、Linux等內核系統管理軟硬件資源、完成任務調度,用于執行自動駕駛相關大部分核心算法,同時整合多源數據完成路徑規劃、決策控制等功能。
控制單元
控制單元基于傳統車控MCU。控制單元加載Classic AUTOSAR平臺基礎軟件,MCU通過通信接口與ECU相連,實現車輛動力學橫縱向控制并滿足功能安全ASIL-D等級要求。當前Classic AUTOSAR平臺基礎軟件產品化較為成熟,可通過預留通信接口與自動駕駛操作系統集成。
車載智能計算基礎自動駕駛操作系統
自動駕駛操作系統是車載智能計算基礎平臺的核心部分。自動駕駛操作系統使用并包含了車控操作系統,它基于異構分布硬件/芯片組合,是車控操作系統的異構分布擴展。車控操作系統是指傳統車控ECU中主控芯片MCU 裝載運行的嵌入式操作系統,如AUTOSAR(OSEK)操作系統,可參考Classic AUTOSAR軟件架構,吸收其模塊化和分層思想。自動駕駛操作系統,既具有車控操作系統的功能和特點,還能夠提供高性能、高可靠的傳感器、分布式通信、自動駕駛通用框架等模塊,以支持自動駕駛感知、規劃、決策、控制等功能的共性實現。自動駕駛操作系統將車控操作系統納入整體系統軟件和功能軟件框架。車控操作系統運行在MCU上,一般以功能安全ASIL-D等級保障車載智能計算基礎平臺安全可靠,并根據自動駕駛需求進行一定程度上的擴展。
系統軟件和功能軟件是車載智能計算基礎平臺安全、實時、高效的核心和基礎。自動駕駛操作系統包含系統軟件和功能軟件兩部分。系統軟件創建復雜嵌入式系統運行環境。功能軟件根據自動駕駛核心共性需求,明確定義自動駕駛各共性子模塊。系統軟件可參考借鑒AUTOSAR軟件架構分層思想,可以實現與Classic和Adaptive兩個平臺的兼容和交互。功能軟件根據自動駕駛共性需求,進行通用模塊定義和實現,可補充AUTOSAR架構在自動駕駛方面的不足和缺失。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
