無人機故障預測系統研究
2019-10-11 07:26:26雷耀麟柴興華
無線電工程 2019年10期
雷耀麟,劉 廈*,胡 炎,柴興華
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081) (2.中國電子科技集團公司航天信息應用技術重點實驗室,河北 石家莊050081)
0 引言
隨著新軍事革命的不斷進步,在局部高科技戰爭中,武器裝備必須具有良好的戰備狀態、任務成功率、機動性和快速反應能力[1],以預測科學為核心的PHM技術應運而生,通過傳感器融合、數據挖掘、專家知識及保障維修決策,實現對武器裝備的綜合安全保障[2]。
PHM技術最早由美軍提出,并在20世紀70年代開始應用于大黃蜂戰斗機的發動機檢測系統,當時主要功能為剩余壽命評估、操作極限監控、傳感器失效檢測和熄火檢查,缺少故障預測;20世紀90年代,美國國防部提出綜合診斷概念并將PHM應用到三軍,與此同時,PHM技術延伸到了飛機狀態管理;2014年,美國F-35聯合戰機開始試用具備故障預測能力的最新版PHM系統[3]。目前,美軍F-35聯合戰機搭載的PHM系統被公認為世界頂級水平,分為裝備內置PHM系統和裝備外部PHM系統。其中,裝備內置PHM系統是通過對飛行數據的收集和有效挖掘,實現無人機狀態監控、故障預測和趨勢跟蹤等,保障無人機安全飛行和提高任務完成率;裝備外部PHM系統的功能是通過接收裝備內PHM系統的上報數據,結合人工目視觀測、故障診斷和趨勢分析等為地面保障人員提供維修決策,實現機下自主保障和視情維修。該系統架構已受到國內外學者的廣泛研究和借鑒。
隨著各軍事強國對PHM技術研究的日益關注和推進,PHM技術已經由早期單一的視情維修功能,演變為涵蓋系統實時狀態監控、故障診斷、故障預測、剩余壽命估計、輔助決策、信息應需傳輸與管理等能力的現代PHM技術[4]。
無人機作為一種典型的高新技術武器裝備,設備眾多、組成復雜,只有建立起與之相匹配的PHM系統,才能充分發揮無人機的作戰效能[5]。國內外學者也已在無人機PHM領域開展了諸多研究,取得了大量的研究成果[6-8]。針對地面綜合保障和設備維修的研究與應用已經相對成熟,而針對無人機飛行狀態實時故障預測方面的研究和應用還比較少。針對無人機飛行過程中智能告警的需求,研究并設計了無人機故障預測系統。在系統架構上,采用分層拓撲結構,實現了對全機的故障預測;在技術體系上,設計了數據支撐、數據規律挖掘、時序分析、趨勢外推和綜合決策等5層算法體系來支撐遙測數據的智能解譯。
1 無人機故障預測系統結構設計
無人機故障預測系統借鑒美軍F-35 PHM系統的裝備內置PHM系統,側重對無人機的飛行過程進行智能監控。該系統可在數據鏈技術的支撐下,布設到當前測控站系統中。
1.1 功能設計
無人機故障預測系統主要分為數據管理、離線分析、在線分析和智能決策4個分系統,如圖1所示。
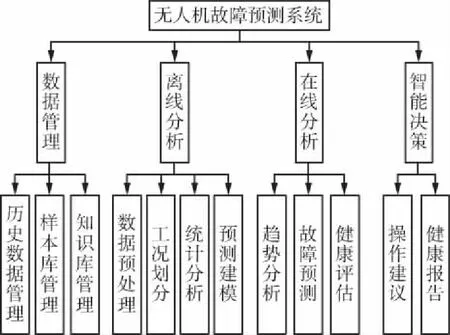
圖1 無人機故障預測系統功能設計
各分系統及功能模塊具體描述如下:
(1) 數據管理分系統。數據管理分系統是無人機故障預測系統的基礎,負責統籌管理歷史遙測數據、樣本庫和知識庫。
(2) 離線分析分系統。首先對歷史遙測數據進行預處理,包括數據歸一化、數據缺項填補、野值濾除等;然后根據飛行階段標志參數將歷史遙測數據劃分為5種工況(起飛、爬升、定高、下降和降落),并且分別統計各工況下參數的數值特性和變化規律等;最后結合統計分析結果,利用神經網絡、機器學習和時序分析等方法構建故障預測模型;
(3) 在線分析分系統。針對實時獲取的下傳遙測數據,提取遙測信號時間序列的低頻分量進行趨勢分析;利用離線訓練的故障預測模型對當前無人機狀態進行故障預測與健康評估;
(4) 智能決策分系統。綜合分析無人機狀態監測和故障預測結果,對無人機當前健康狀態進行綜合評估,主動向地面站發出故障預警和操作建議。
1.2 拓撲結構設計
無人機故障預測系統未設置部件級故障預測,僅考慮設備級以上的故障預測。
如圖2所示,在飛行過程中,通過對設備狀態空間(也即與設備相關的遙測參數)的實時監測與故障預測,可以獲得該設備的健康狀態;融合所有設備的健康狀態信息,通過推理機和專家系統可以進一步評估分系統的健康狀態;最后,根據各個分系統的健康狀態,對無人機系統進行綜合健康管理。
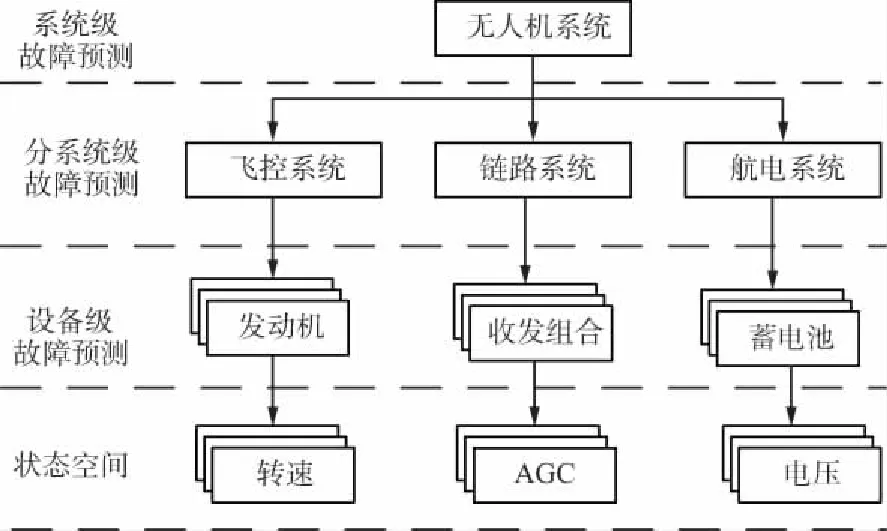
圖2 無人機故障預測系統拓撲結構
2 系統的故障預測原理
國內外諸多PHM領域研究學者已經進行了大量故障預測算法研究,取得了豐碩的成果。比如Shang Shuai等人[9]將長短時記憶網絡(LSTM)用于剩余壽命預測,使時間序列信息被充分利用;Xue Xiaoling等人[10]將極限學習機(ELM)應用在2014年IEEE PHM挑戰賽的質子交換膜燃料電池數據集上,實現了剩余壽命預測;Ting An[11]將一種融合遺傳算法的BP神經網絡應用于電氣設備的故障預測,與BP神經網絡預測算法相比獲得了更低的預測誤差;袁慶洋等人[12]用多段維納過程模型取代傳統的單一階段維納過程來預測電機剩余壽命,提高了預測精度;李琪等人[13]提出了一種變工況下基于相似性的剩余壽命預測方法,在2008年 PHM 挑戰賽的商用渦輪發動機數據集上獲得了比相似性算法更高的預測精度。
以上算法均要提供充足的歷史退化模型或故障數據集。然而,在研究無人機飛行中的故障預測問題時,我們無法獲得大量的故障數據,也很難對無人機系統狀態進行物理或數學建模。為此,我們提出了一種間接故障預測方法。
2.1 故障預測技術體系
設計的故障預測技術體系如圖3所示,自底向上:
第一層是數據支撐層,包括數據預處理、故障案例分析和故障特征遷移,主要是為故障預測提供數據資源和故障知識;
第二層是數據規律層,通過時域分析、頻域分析、數理統計、數值分析、參數間關聯關系分析,挖掘遙測數據的數值特性和數據規律;
第三層為時間序列分析層,采用分段非線性函、多參數LSTM時序建模等深度挖掘遙測數據的時間序列特性;
第四層為趨勢外推層,通過趨勢分析和外推算法,預測未來某時刻系統的健康狀態,由此實現故障預測;
第五層為智能決策層,根據故障預測結果,綜合評估無人機健康狀態,自主發出故障預警,給出下一步操作建議。
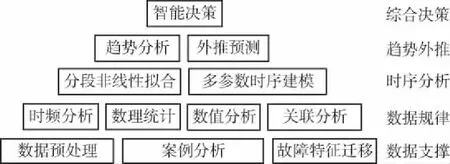
圖3 故障預測技術體系
針對不同的設備,其故障預測的實現途徑略有不同,但大體上都符合圖3所示的技術體系。
2.2 故障預測技術流程
提出的故障預測技術流程如圖4所示,主要分為離線學習和實時分析2個部分。
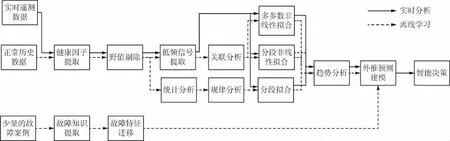
圖4 提出的故障預測技術流程
無人機故障預測核心算法介紹:
(1) 健康因子提取。提取可以直接或間接反映設備健康狀態的關鍵參數;

(1)
式中,函數Γ(·)表示非線性擬合模型。
(2)
設備的退化模型為:
(3)
設LΔm為第m次模型驗證的平均誤差。則令判決閾值為:
Th=p·max(LΔm),
(4)
式中,p為設定虛警率。使用少量真實故障樣本Sl對Th進行干預,得:
(5)
(4) 外推預測
選擇合適的外推算法模型,如趨勢外推法等,令:
Ω(t+T)=K(Ω(t))。
(6)

3 仿真實驗
根據遙測數據的變化特性模擬生成了故障數據集,所有參數均進行了數據標準化操作,以下實驗均以此數據集為數據基礎。仿真實驗以發動機設備為例,非線性回歸模型是預訓練好的DNN網絡模型。取轉速(s)、排氣溫度(t)、滑油壓力(p)和節風門(a)作為發動機設備的健康因子,發動機設備的健康狀態可通過{s,t,p,a}組成的狀態空間來評估。
3.1 多閾值參數異常檢測
由于發動機設備在不同的飛行狀態和飛行控制模式下,其工作的動力學模型存在差異。因此,針對發動機設備的異常檢測首先需要將遙測數據序列劃分為20種工況(5種飛行狀態、4種飛行控制模式)。利用海量歷史遙測數據對轉速、排氣溫度、滑油壓力、節風門進行統計分析。統計4種參數在20種工況(5種飛行狀態、4種飛行控制模式)下的數值特性,具體包含:每種工況下的平均值(Mean)、最大值(Max)和最小值(Min)。以滑油壓力參數為例,其20種工況的統計閾值如表1所示,由于表1由歷史大數據統計生成,也可以直接作為告警閾值。
表1 滑油參數20種工況的統計閾值
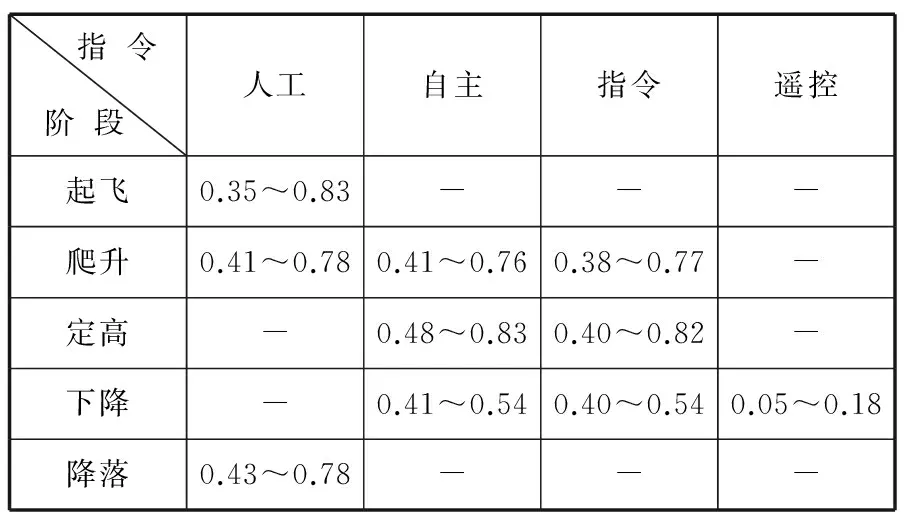
指令階段人工自主指令遙控起飛0.35~0.83---爬升0.41~0.780.41~0.760.38~0.77-定高-0.48~0.830.40~0.82-下降-0.41~0.540.40~0.540.05~0.18降落0.43~0.78---
本文采用了直方圖統計方法,首先生成參數的統計直方圖,并根據頻數對直方圖進行排序;然后設置一個恒定的置信度,實驗中取95%;最后,選取頻數在前95%范圍內的直方圖進行統計分析。
與傳統單一閾值參數監控的模式相比,基于多閾值的參數監控模式考慮了不同工況下無人機運動狀態的差異,具有更精確的故障檢測能力。
3.2 基于深度學習的參數異常檢測
發動機設備健康狀態的2個重要參數為發動機轉速和滑油壓力。由式(1)~式(5)可知,利用發動機各參數間的屬性關聯關系可以對發動機轉速和滑油壓力進行回歸預測,并根據預測值與真實值的偏差,對參數進行故障檢測。測量值{s,t,p,a}表示無人時實時下傳參數,預測值為回歸模型計算出的預測值{s′,t′,p′,a′},偏差值表示測量值與預測值{s′-s,t′-t,p′-p,a′-a}。
參數異常檢測仿真如圖5所示。從圖5(a)中可以看到,在A位置處,轉速的真實值和預測值之間的偏差較大,顯著高于其他區域,數據異常發生在4 640時刻;在圖5(b)中,在B位置(4 712)處同樣發生了較嚴重的滑油壓力值異常。通過關聯分析可知,在4 640~4 712時刻附近,發動機系統出現了故障征兆。

圖5 參數異常檢測仿真
3.3 趨勢外推預測
當確定發動機發生故障征兆后,如果此時偏差值已經超出了故障告警閾值,則立刻向系統發出故障告警。如果此時偏差并未超出告警閾值,則通過直線趨勢外推,預測T時間后的狀態,如圖6所示。
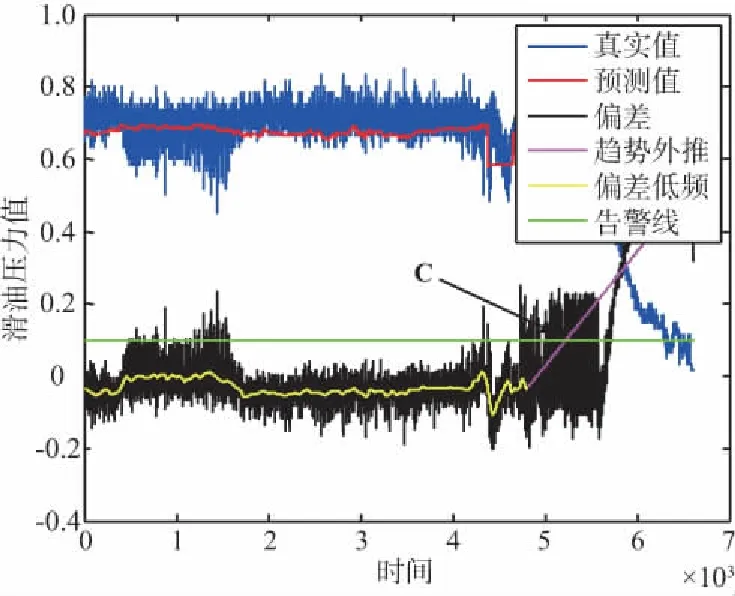
圖6 滑油壓力參數直線外推預測
從圖6中可以看出,通過直線趨勢外推計算可知,故障將在5 400時刻(C點)發生。此時,需要提前處理異常,并實時跟蹤參數變化趨勢。
4 結束語
本文主要從系統結構設計和算法技術體系2個方面對設計的無人機故障預測系統進行了詳細介紹,并且利用模擬故障樣本集對故障預測算法進行了仿真實驗。
提出的故障預測算法充分利用了機器學習技術和數據挖掘技術。我們提出的無人機故障預測系統在提高監控系統故障預測能力的同時,還存在以下問題:故障樣本的不足導致了故障知識庫不夠豐滿,而系統的故障預測模型是建立在現有故障知識庫的基礎之上。隨著新故障類型的收集和故障知識庫的擴充,系統的故障預測系統還有較大的提升空間。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50