一種基于點云數據的三維建模方法研究
2019-10-11 07:19:52常山縣自然資源和規劃局統一征地辦公室吳建岳
浙江國土資源 2019年9期
□ 常山縣自然資源和規劃局統一征地辦公室 吳建岳
無人機傾斜攝影測量是利用多旋翼無人機到實地航拍影像,再經過軟件自動化建模生成實景三維模型,因此具備很高的真實性,也能夠測量更廣闊的范圍,但是容易缺失數據。三維激光掃描技術是采用非接觸式高速激光測量方式,快速地獲取測量對象表面幾何特征的重要技術手段。三維激光掃描技術目前已經在文物保護、國土測繪、建筑BIM模型等許多方面取代了傳統測繪,其數據的全面性及精細度,為許多行業領域研究發展提供了新的思路和方法。但是三維激光掃描技術存在著測量范圍小的缺點。基于此,在本文的研究過程中,將綜合運用兩種測量技術獲取空間數據,以此提高測區三維模型精度。
一、基于點云數據的三維建模方法
(一)無人機傾斜攝影
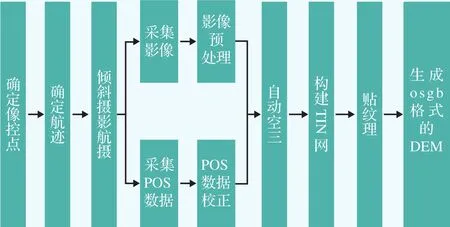
▲ 傾斜攝影流程圖
通過在同一飛行平臺上搭載5臺傳感器,同時從一個垂直、四個傾斜、五個不同的角度采集影像,拍攝相片時,同時記錄航高、航速、航向和旁向重疊、坐標等參數,然后對傾斜影像進行分析和整理。在一個時段,飛機連續拍攝幾組影像重疊的照片,同一地物最多能夠在3張相片上被找到,這樣內業人員可以比較輕松地進行建筑物結構分析,并且能選擇最為清晰的一張照片進行紋理制作,向用戶提供真實直觀的實景信息。影像數據不僅能夠真實地反映地物情況,而且還可通過先進的定位技術,嵌入地理信息、影像信息,獲得更高的用戶體驗,極大地拓展遙感影像的應用范圍。
(二)三維激光掃描技術的原理
三維激光掃描技術是繼GPS技術以來又一新突破的測繪技術,是以三維激光掃描儀為主體的現代化測繪技術,由內置數碼相機、附屬設備、后處理軟件、電源等組成。三維激光掃描技術的工作原理可以表述為:激光二極管發射周期性的激光脈沖,由接收透鏡接收目標表面的反射信號后形成相應的接收信號,利用發射與接收反射信號的時間差計算掃描儀的測距S,同時將掃描儀鏡頭在水平方向和垂直方向上的觀測角度值標記為φ和θ,被測點極為P,則被測點的三維坐標為P(x,y,z)的計算公式為:
XP= Scosφcosθ
yP= Ssinφcosθ
(三)綜合運用
通過多旋翼無人機獲取航空影像,經勻光勻色、幾何校正、同名點匹配、區域網聯合平差,通過三維建模等關鍵技術制作測區三維傾斜測量模型數據,模型具有在虛擬三維空間中的位置和姿態數據,可進行實時測量。使用三維激光掃描儀,將獲取測區的高精度點云數據,拼接、濾波、多邊形擬合、孔洞修補,分區域選擇相片進行紋理映射,制作具有實時量測功能的真三維模型。然而,三維激光掃描技術存在對高密度植被無法穿越、受潮濕環境影響較大、數據處理對軟硬件要求高等不足,且傾斜攝影產生的三維模型會產生空洞和失真,水面的三維模型存在大面積空洞和地物模型邊緣平滑等缺陷。因此,針對任務及測區地形地物的特點,試驗采用無人機傾斜攝影測量和地面三維激光掃描相結合的方式進行,從而克服兩種數據采集技術的缺陷。
二、應用案例
(一)測區概況
該項目位于天目湖山水園。區域內有植被、水系、建筑物、道路、古跡等多種地物,地勢陡峻,植被復雜。鑒于測區地形地貌的復雜性和特殊性,采用常規測量手段施測難度大,作業效率低,而無人機航空攝影測量與三維激光掃描技術能有效地解決常規地形測量的不足。該項目采用無人機對測區全范圍進行航空攝影并航測成圖,采用三維激光掃描技術修補測區空洞,對測區進行全野外數字化測圖,同時也有利于對成圖精度符合性進行檢驗。
(二)工作流程
1.儀器和軟件
采用儀器包括:大疆無人機M600Pro(垂直起降固定翼無人機,飛行總重 24kg, 任務載荷 2kg, 巡航速度25m/s, 續航時間4h,抗風能7級);成都睿鉑RIYD2(可量測型航測相機,五相機鏡頭,有效像素1億像素,畫幅53.4mm×40mm)。采用軟件包括: 無人機攝影測量數據自動處理系統Smart3D,三維激光掃描儀Riegl-R400 及配套軟件RISCANPro。
2.數據采集過程
(1)無人機傾斜攝影
此次無人機傾斜攝影試驗,共有6個像控點,采用像控坐標系為2000坐標系,高斯三度帶,中央子午線120度,航攝時自動采集POS數據。
此次航測的航高為800米,航向重疊度為75%,旁向重疊度在50%,共獲取了11185張像片。在內業空三加密前,對影像進行了畸變差校正,像控點以注記說明和點位略圖為參照刺點,綜合判定點位,對個別錯點、疑點校核左右像對及上下航線同名目標,以判定其準確性。
(2)三維激光掃描
試驗測站7個,每次測站用時8分50秒。三維激光掃描采集完畢后,利用RISCAN軟件完成點云數據的數據集成。
(3)DEM與 DOM制作
使用smart3D軟件,通過傾斜攝影過程中得到的POS數據和三維激光掃描測站得到的 RTK數據,采用ICP算法,合成傾斜攝影獲得的DEM模型與三維激光掃描得到的DEM模型,得到更精細的 DEM 模型,而后通過貼紋理得到數字正射影像模型。
三、項目試驗成果
點云是激光掃描和傾斜攝影測量成果的基本體現形式,記錄著測量對象平面、高程及表面色系等信息,是實施后期建模、專業分析的基礎數據。因此,三維點云數據的測量精度至關重要。為判別測量成果精度的準確性,本文引用 RTK 實測數據與 兩類成果點云進行比較驗證,兩類點云數據在水平面上均具有良好的控制效果,誤差基本在毫米級和厘米級,但無人機傾斜攝影在高陡地形上的高程精度控制明顯要弱于地面三維激光掃描,誤差達到米級。為彌補點云之間局部偏差問題,宜以三維激光點云為基準,將傾斜攝影點云進行配準擬合,實現點云數據的融合。
四、結語
本文通過綜合運用傾斜攝影與三維激光掃描技術兩種手段,提出了一種在復雜地形條件下的高精度方法。三維激光掃描點云數據在精度控制上要優于無人機攝影測量,以激光點云為基準,采用基于特征點的 ICP 配準算法可有效融合兩類不同的點云數據,從而高效率構建高精度、高分辨率的三維點云模型,由此克服地形地物的限制與遮擋,實現對復雜地面信息的無死角數據采集,提高了作業效率,此外還減少了 3dmax人工修補空洞的工作。采用 RTK 與 POS數據統一激光掃描和傾斜攝影的控制點坐標系,可保障 兩類測量成果坐標統一,便于利用 ICP配準算法實現兩類不同測量成果的數據級匹配。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
