基于距離參數化EKF 濾波器的純方位目標運動分析
2019-10-12 02:02:48費瑋瑋楊洪康劉海旻
艦船科學技術 2019年9期
關鍵詞:檢測
樊 垚,費瑋瑋,楊洪康,劉海旻
(中國船舶工業系統工程研究院,北京 100094)
0 引 言
由于被動探測器僅能獲得目標的方位信息而不能檢測目標的距離,利用單平臺單基陣測量定位時,在本艦不進行機動的情況下,僅使用該探測平臺的方位角測量值,目標運動狀態不可觀測[1-3]。被動聲吶跟蹤水中目標是典型的目標運動分析(TMA)問題,探測平臺機動是目標運動可觀測的必要條件,通過非線性濾波方法以及探測平臺機動提高純方位TMA 問題中目標狀態可觀測性。目前常用的目標跟蹤定位方法有直角坐標系下的擴展卡爾曼濾波、偽線性濾波及修正極坐標下的擴展卡爾曼濾波等[4-5]。隨著軍事技術的不斷發展,敵我雙方的對抗性顯著提高,在雙方平臺對抗博弈的條件下,被跟蹤目標會通過采取必要的機動提高生存能力,因此,機動目標運動要素估計的研究成為軍事上的迫切需求。
本文在修正極坐標系下研究了單平臺被動目標跟蹤定位問題,提出一種距離參數化濾波器設計方法,降低濾波器初始參數對目標運動狀態估計的不利影響,提高估計算法收斂速度和精度。給出基于目標運動狀態濾波器的目標機動檢測算法,實現對水中機動逃逸目標運動要素迅速、準確的估計,解決水中機動目標檢測與跟蹤問題。
1 修正極坐標系下目標運動分析
1.1 修正極坐標系
在不同的坐標系中目標運動估計濾波系統方程有不同的特點,本文采用修正極坐標將系統狀態變量分成了可觀測和不可觀測兩部分。目標與探測平臺的幾何關系如圖1 所示。
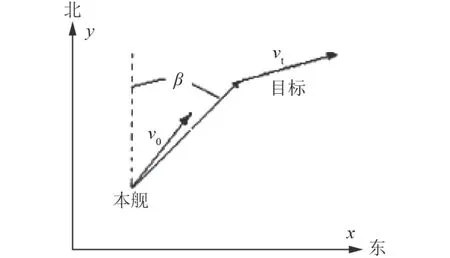
圖1 目標與探測平臺的幾何關系Fig. 1 Relative geometric graph of target and detective platform
直角坐標系的狀態向量定義為:
其中, vx, vy, rx, ry分別為目標在x,y 方向的相對速度和相對距離。
修正極坐標系下的系統狀態向量定義為:
令目標和探測平臺在x,y 方向上的加速度分別為atx, aty, aox, aoy, 相對加速度為 ax, ay,則

令

得
令
可得到修正極坐標系下的狀態方程為:
由于在修正極坐標系中,目標方位角 β(t)是狀態向量的一個分量,因此,在修正極坐標系中,純方位TMA 問題的測量方程為:

其中, n(t)為目標方位角測量噪聲。
1.2 目標運動要素解算
修正極坐標系下目標運動要素解算表達式如下:
其中: vx, vy為 目標在x,y 方向的絕對速度; θ為目標的航向角; v為目標速度。
2 距離參數化EKF 濾波器設計
2.1 EKF 算法
采用擴展Kalman 濾波(EKF)算法求解純方位TMA 問題,該算法采用遞推方式,計算量較小,能夠對系統進行實時定位,且估計精度較高,利于實際工程的應用。純方位TMA 問題中系統狀態方程(3)和測量方程(4)為連續形式,適當選取t=kT、to=(k-1)T,可將連續方程離散化,其中,T為采樣周期。采用式(8)所示標準EKF 濾波算法對探測平臺與目標相對運動狀態進行實時估計。

其中:y(0|0)為狀態向量初始給定值;P(0|0)為給定的y(0|0)誤差協方差陣;σ2為測量量的誤差方差。
2.2 距離參數化(RP)算法
在純方位TMA 問題中,探測平臺與目標相對距離是不可觀測變量,當目標與探測平臺相對距離先驗分布信息比較模糊時,直接使用EKF 濾波算法容易導致狀態協方差矩陣過早收斂,從而使得濾波發散。距離參數化(RP)方法將初始距離按照相對距離估計值的變異系數分成若干個獨立區間,每個獨立區間使用獨立的EKF 濾波器進行狀態估計計算,初始時刻每個濾波器將賦予均勻的權值。當系統獲得下一時刻觀測值時,系統的狀態向量和協方差矩陣要升級一次,與此同時,在RPEKF 中各個獨立區間的權重也需要重新計算并歸一化處理。假定目標方位角的估計值和測量值服從高斯分布,利用貝葉斯理論,給出子區間權重遞推計算公式,如式(9)。如果子區間內目標方位角的估計值與測量值有較大的差別,那么對應的子區間權重就會降低。反之,權重就會升高。

式中:Wnk為第n個區間在k時刻的權重;為第n個區間方位角預測值;θm為方位角測量值;σ2=+為第n 個區間的方位角方差值;為第n 個區間的方位角預測值誤差方差值;為方位角測量值誤差方差值。
3 目標機動檢測算法
3.1 基于RPEKF 的目標機動檢測算法
純方位TMA 問題針對靜止目標或勻速直線運動目標開展研究,當目標出現機動時,目標運動要素估計算法無法實現對目標的無偏估計,系統狀態無法收斂至真實狀態值。為克服此缺陷,設計機動檢測環節,在檢測到目標機動時重新初始化目標運動狀態濾波器。
由于RPEKF 是幾個獨立EKF 共同工作的濾波系統,所以其目標機動檢測算法應在各EKF 目標機動檢測算法的基礎上進行修正,算法中使用系統狀態綜合值和系統協方差矩陣綜合值實現目標機動檢測,表達式如下:
其中:
式中: Wik為k 時刻,第i 個獨立濾波器的權重值;yi(k|k-1)為k 時刻,第i 個獨立濾波器的狀態估計值;Pi(k|k-1)為k 時刻,第i 個獨立濾波器的狀態誤差協方差矩陣;若 Uk大于給定閾值 μk則認為目標機動,將狀態向量 yi(k|k) 和狀態誤差協方差矩陣 Pi(k|k)進行重置,并且暫停機動檢測環節 S 個周期, S為滯后步長。
4 仿真驗證
4.1 基于RPEKF 的目標運動要素估計仿真分析
4.1.1 仿真初始條件
探測平臺與目標相對距離34000m,目標舷角30°。
本文中探測平臺采用“Z”字形機動方式,機動過程由勻速直線運動與勻速圓周運動交替進行。其中,探測平臺移動速度為5m/s,轉彎角速率為1°s。該運動方式由3 個參數決定,分別是一周期內勻速直線運動的時間Tline為400s,一周期內勻速圓周運動的時間Tcircle為90s,機動運動的瞄準線夾角Φaim為β0。這里,β0為初始時刻目標方位角。
探測平臺測量量為疊加了白噪聲的目標方位角,噪聲均值為0,標準差為1°。
4.1.2 濾波器初始參數
探測平臺采用被動聲吶測量目標方位角,由于對目標初始位置缺乏先驗信息,這里給出目標初始相對距離分布區間為[10000m,35000m],采用RPEKF 濾波器對目標運動要素進行估計。
根據距離分布區間大小決定了EKF 濾波器數量,本文選擇濾波器個數為4。假定每個獨立距離分布區間中距離誤差服從均勻分布,對應于4 組EKF 濾波器的初始距離可以分為4 個獨立區間[10000m,14000m],[14000m,19600m],[19600m,27400m],[27400m,35 000 m],每個獨立區間都對應一個獨立的EKF 濾波器,每個獨立區間分配的權重為0.25。
4 組獨立的EKF 濾波器初值如下:
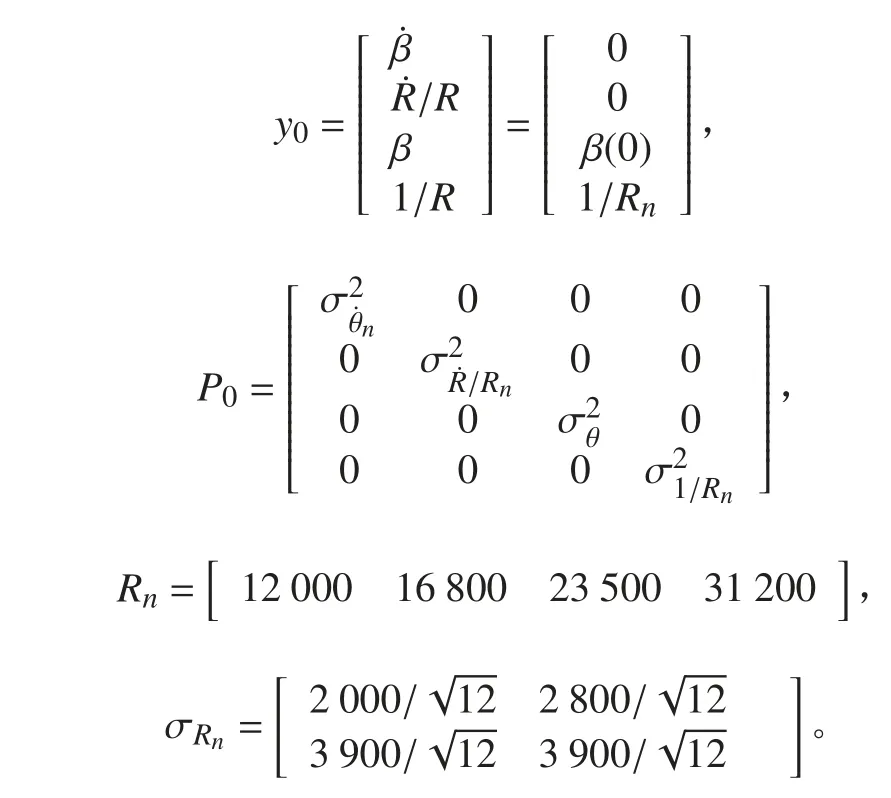
式中:β(0)為初始時刻目標方位角測量值; Rn為第n 個區間的中心值;σθ˙n為第n 個區間狀態變量 θ˙的標準差,取為1 5/Rn;σR˙/Rn為第n 個區間狀態變量 R˙/R的標準差,取為15/Rn;σθ為目標方位角測量誤差標準差,取為1°;σ1/Rn為第n 個區間狀態變量1 /R的標準差,取為。
4.1.3 仿真分析
定義目標運動要素估計誤差百分比如式(15) 所示,估計誤差比例反映了目標運動要素估計值的相對誤差水平。

基于前述仿真條件,采用如式(3)所示EKF 濾波器狀態方程,如式(4)所示測量方程,如式(8)所示濾波方程,如式(9)所示各EKF 濾波器權重升級方程,進行數字仿真分析。圖2 為探測平臺與目標相對運動軌跡。圖3~圖5 為目標距離、速度、航向估計誤差百分比。
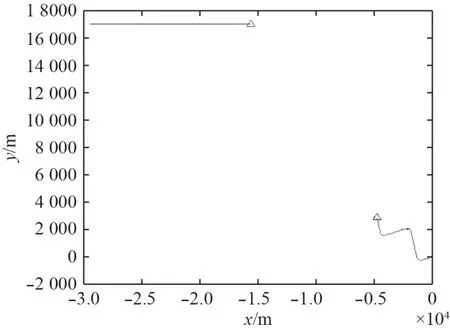
圖2 本艦-目標相對運動軌跡Fig. 2 Trajectory of target and detective platform
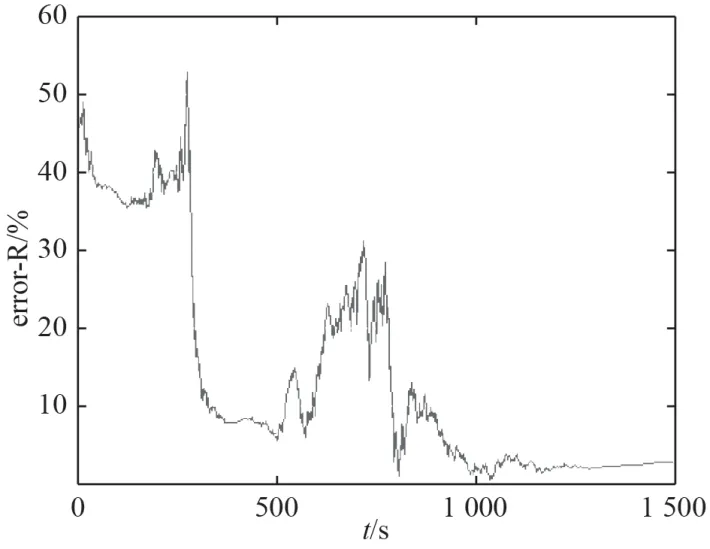
圖3 目標距離估計誤差百分比Fig. 3 Evaluated error percentage of target distance
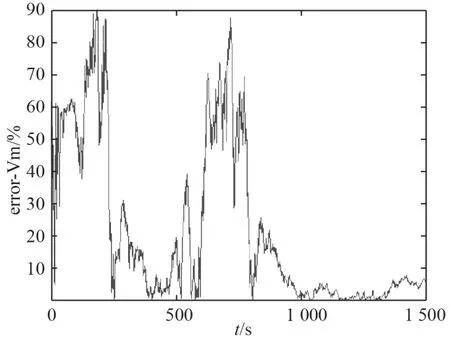
圖4 目標速度估計誤差百分比Fig. 4 Evaluated error percentage of target velocity
圖6~圖9 為RPEKF 濾波器中4 組獨立的EKF 濾波器權值變化曲線。
由圖可知,目標距離,目標速度和目標航向均能收斂于真值。由于初始相對距離為34 000 m 在第4 區間內,第1、2、3 區間權重值變為0,第4 區間權重值為1,表明本文中提出的距離參數化方法是有效的。
4.2 機動目標運動要素估計仿真分析
4.2.1 仿真初始條件
在實際水上目標機動場景中,最常見的運動形式是分段勻速直線運動,目標機動方式描述如下:

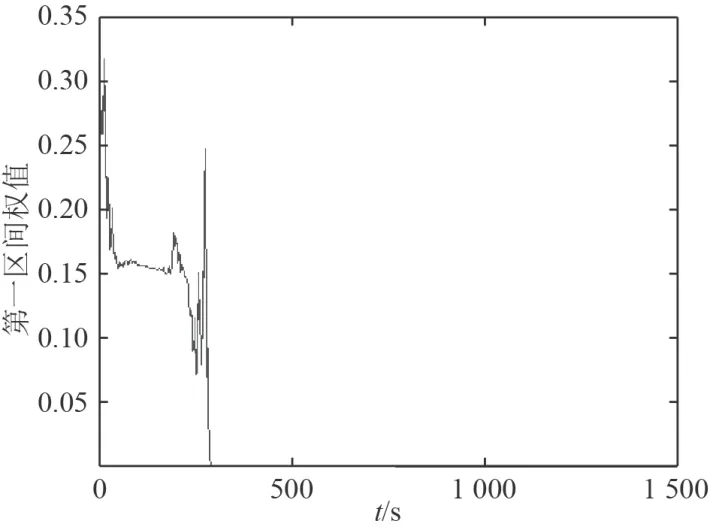
圖6 第1 區間權值變化曲線Fig. 6 Weight coefficient curve of the first section
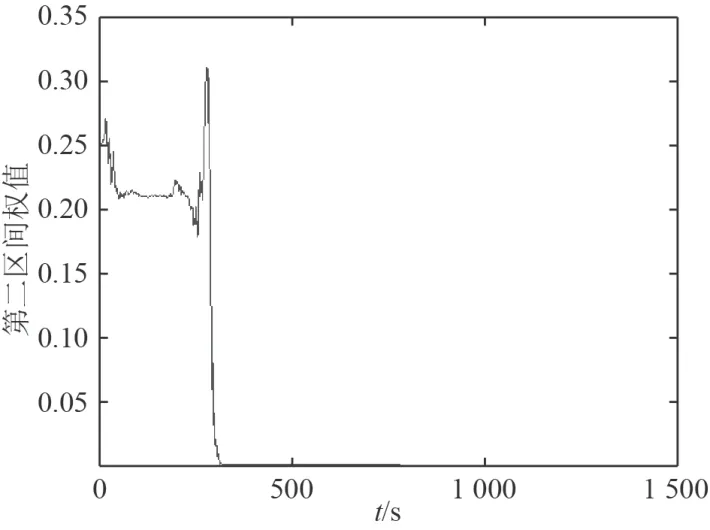
圖7 第2 區間權值變化曲線Fig. 7 Weight coefficient curve of the second section
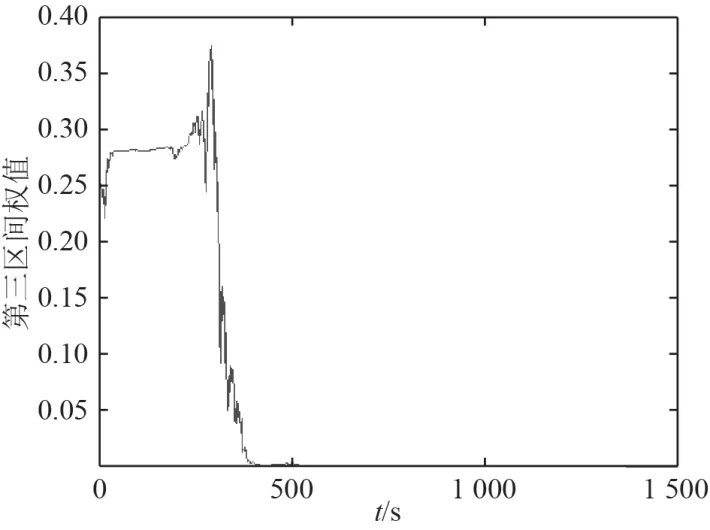
圖8 第3 區間權值變化曲線Fig. 8 Weight coefficient curve of the third section
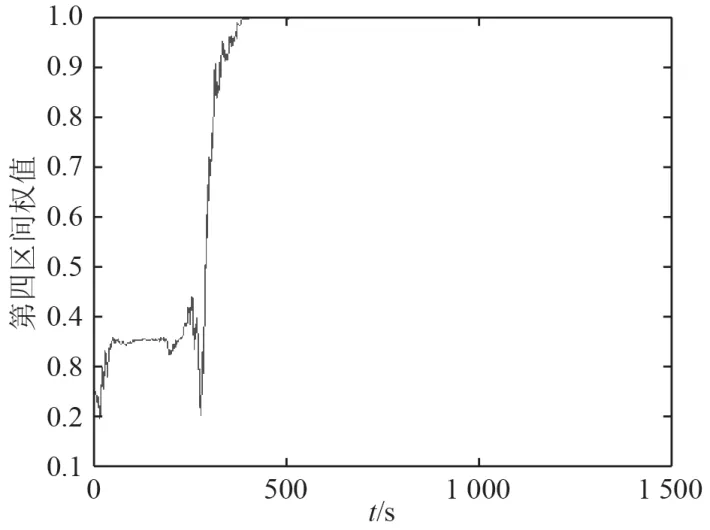
圖9 第4 區間權值變化曲線Fig. 9 Weight coefficient curve of the fourth section
其中:cmnew為目標機動后的航向;βTm為本艇相對目標的方位;qTm為本艇相對目標的舷角,目標機動時刻設為1 500 s。
檢測目標機動后,本艦機動形式如4.1 節所述,軌跡參數Tline為600 s,Tcircle為90 s,Φaim為βreset。其中,βreset為檢測到目標機動時刻目標方位角。
其余仿真初始條件同4.1.3 節相關參數。
4.2.2 濾波器初始參數
當檢測到目標機動后,濾波器重置,其初始狀態如下:
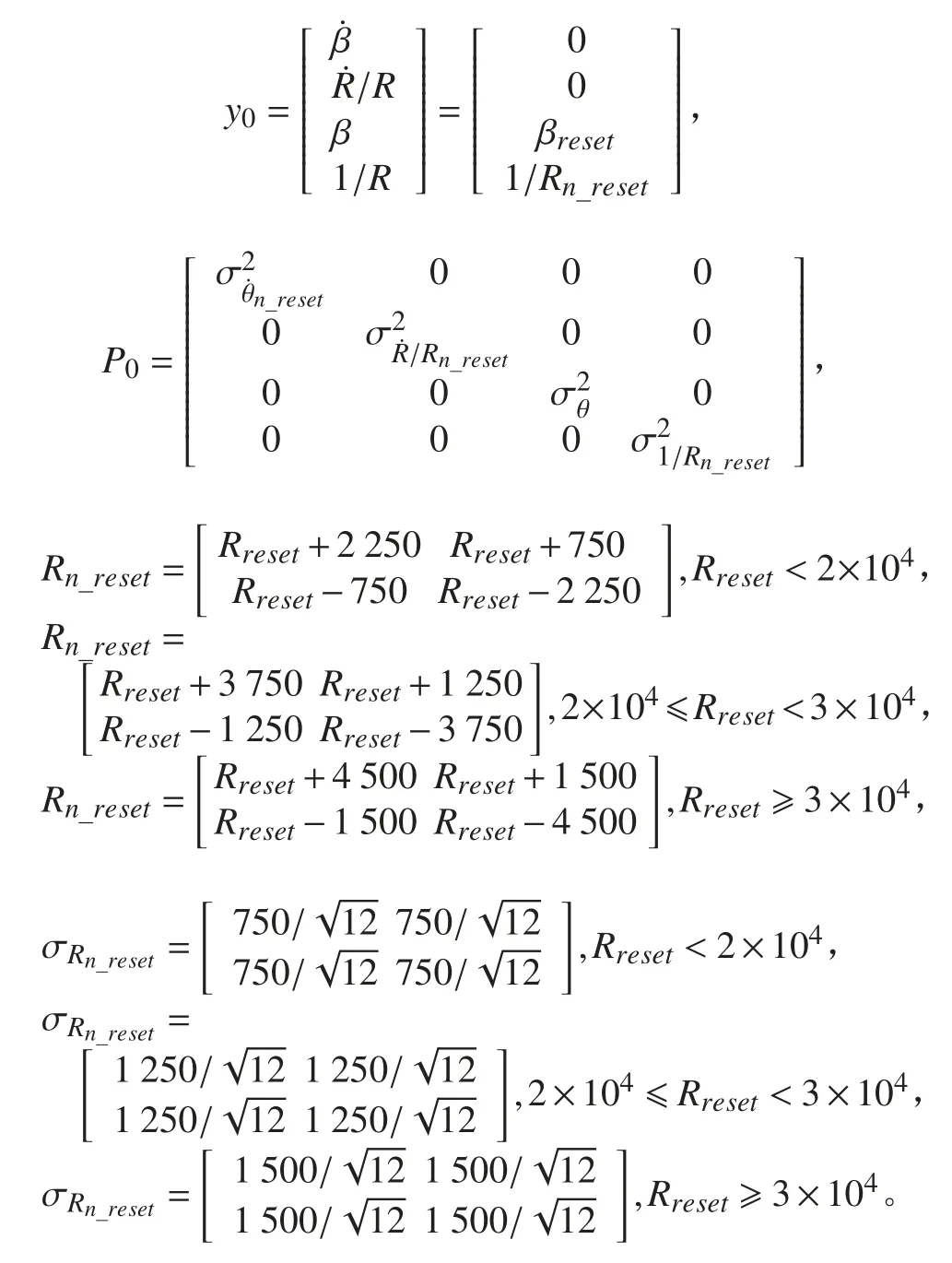
式中:βreset為濾波器重置時刻目標方位角測量值;Rn_reset為濾波器重置后第n 個區間的中心值;σθ˙n_reset為濾波器重置后第n 個區間狀態變量 θ˙的標準差,取為1 5/Rn_reset;為第n 個區間狀態變量R˙/R的標準差,取為15/Rn_reset; σθ為目標方位角測量量標準差,取為1°;σ1/Rn_reset為第n 個區間狀態變量1/R 的標準差,取為σRn_reset/。
其余濾波器初始參數同4.1.2 節相關參數。
4.2.3 仿真分析
基于前述仿真條件,采用如式(3)所示EKF 濾波器狀態方程,如式(4)所示測量方程,如(8)所示濾波方程,如式(9)所示各EKF 濾波器權重升級方程,如式(10)~式(12)所示目標機動檢測算法,進行數字仿真分析。圖10 為探測平臺與目標相對運動軌跡,圖11~圖13 為目標距離、速度、航向估計誤差百分比。
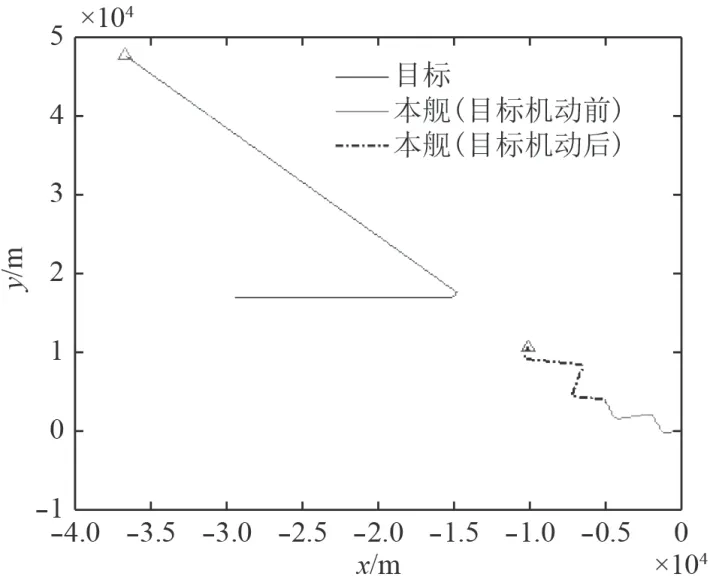
圖10 本艦-目標相對運動軌跡Fig. 10 Trajectory of target and detective platform
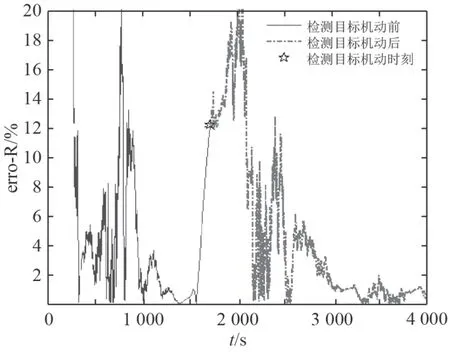
圖11 目標距離估計誤差百分比Fig. 11 Evaluated error percentage of target distance
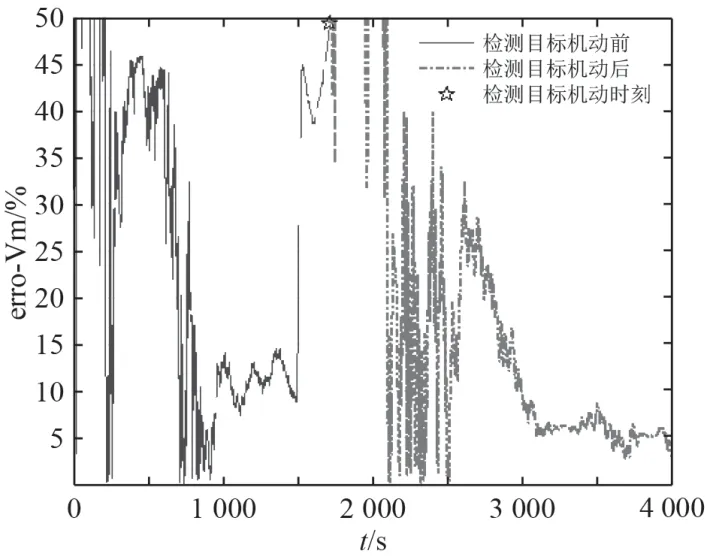
圖12 目標速度估計誤差百分比Fig. 12 Evaluated error percentage of target velocity
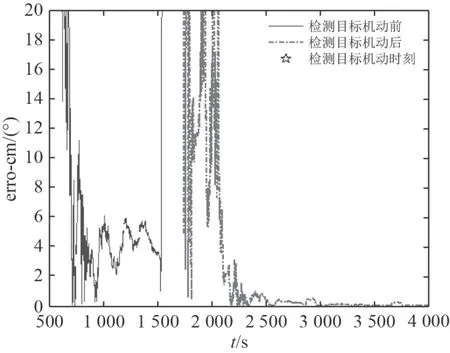
圖13 目標航向估計誤差百分比Fig. 13 Evaluated error percentage of target heading angle
可知,該條件下檢測到目標機動的時刻為1 721 s,目標機動檢測算法可行。濾波器重置后,目標距離估計值于2 475 s 收斂于10%誤差范圍內;目標速度估計值于3 004 s 收斂于10%誤差范圍內;目標航向估計值于2 071 s 收斂于10°誤差范圍內。
5 結 語
1)針對純方位TMA 問題,本文給出非線性RPEKF濾波方法,通過引入多組EKF 濾波器和濾波器權重調節,能夠有效降低濾波器性能對于初值偏差的敏感性,改善其目標運動狀態量的收斂特性。
2)針對水面目標常用的分段勻速直線機動形式,本文提出的基于RPEKF 濾波器的目標機動檢測方法能夠有效檢測目標機動,并通過重置濾波器參數抑制目標運動狀態濾波發散。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48