粒子加速器中高精度絲線絕對位置測量技術研究
2019-10-12 08:14:14羅明成柯志勇王小龍
測繪通報 2019年9期
關鍵詞:測量
梁 靜,羅明成,王 銅,董 嵐,羅 濤,柯志勇,王小龍
(1. 中國科學院高能物理研究所,北京 100049; 2. 東莞中子科學中心,廣東 東莞 523803)
為了滿足粒子加速器設備高精度安裝要求,準直技術向著多元化的方向發展,準直對象也逐漸擴展到對絲線等絕對位置的高精度測量。其中,振動線技術對磁鐵磁中心引出標定具有巨大優勢,但是如何將代表磁中心位置的振動線精確引出到磁鐵的外基準上,是需要解決的問題。由于絲線的非接觸測量特性,無法采用高精度的三坐標機、激光跟蹤儀等進行接觸測量,而采用傳統光學儀器,如水準儀 、工具經緯儀等,由于受人眼瞄準誤差、儀器自身誤差等因素影響,絲線位置測量的精度難以提高。因此,需要對高精度的絲線絕對位置測量技術進行研究。
目前,國外加速器準直領域對絲線進行位置測量的方法主要有3種:一維光電式、二維電容式、三維視覺式。在美國斯坦福直線加速器中心SLAC的直線加速器相干光源LCLS四級鐵標定中[1-2],采用一維光電式絲線定位儀確定振動線位置,其原理為:當光被絲線遮擋時,則光電傳感器接收到的信號產生相應變化,從而來確定絲線中心相對于光電中心的距離,最后利用兩個垂直放置的絲線定位儀測量出振動線相對于絲線定位儀外部工具球的橫向和高程距離。在歐洲核子中心CERN的緊湊型直線對撞機CLIC的DBQ磁鐵標定中,采用二維電容式絲線定位儀確定振動線位置[3-6]。其原理為:當絲線穿過上下左右兩對平行電極時,引起極間介質的介電常數的變化,從而將絲線位移轉換為電容量的變化,得到絲線相對位移與電容量的線性關系,最后得到絲線相對于其底板定位基準槽在橫向和垂直方向的距離。同樣,在CERN的CLIC概念設計報告中,提出了一種新的絲線定位技術對引張線的位置進行測量,從而將設備準直到一條直線上[7-10],本文稱之為三維視覺式絲線定位儀。其原理為:采用2個工業相機,從兩個不同的方向對絲線進行近景成像,結合預先標定獲取的相機位置及參數,進而得到絲線相對于底板定位基準槽的三維絕對位置。我國即將開工建設的國家重大科技基礎設施項目“高能同步輻射光源”HEPS,其對振動線高精度位置測量精度要求達到10 μm。綜上,本文對采用數字近景攝影測量技術進行絲線三維絕對位置測量的方法進行研究。
1 數字近景攝影測量原理
數字近景工業攝影測量是通過在不同的位置和方向獲取同一物體兩幅以上的數字圖像,經計算機圖像匹配等處理及相關數學計算后得到待測點精確的三維坐標。物方坐標系O-XYZ,也稱為全局坐標系,用于描述被測目標在物方空間的位置。像空間坐標系S-xyz用于表示像點在像方空間的位置,原點為光學鏡頭的投影中心S,z軸和光學鏡頭的主光軸重合,垂直于像平面,x軸、y軸分別與像平面坐標系的x軸、y軸平行,So為光學鏡頭的有效焦距f。如圖1所示。
首先通過圖像傳感器的分辨率、尺寸大小,將像點的像素坐標(u,v)轉換成以公制單位表示的像平面坐標(x,y)。假設物方點P在物方坐標系下的坐標為(X,Y,Z),在像空間坐標系下的坐標為(X′,Y′,Z′),其對應的像點p在像空間坐標系中的坐標為(x,y,-f),投影中心S在物方坐標系下的坐標為(XS,YS,ZS)。根據物方點、投影中心、像點的三點共線條件,得到物方坐標系與像空間坐標系的轉化關系及物方點坐標與像點坐標的關系為
(1)
式中,R為像空間坐標系向物方坐標系轉化的旋轉矩陣;λ為比例因子。旋轉矩陣的表達可以用繞3個坐標軸的旋轉角(εx,εy,εz)來表示
R為正交矩陣,R-1=RT。
相機在實際成像中,像點在像平面上相對其理論位置存在偏差(Δx,Δy)。將式(1)展開并消去比例因子,同時顧及像點系統誤差的影響,得到共線方程式[11-12],如式(2)所示。常用的像點系統誤差模型為十參數模型,除了像主點偏差(x0,y0)和相機有效焦距f外,還包括鏡頭形狀加工誤差引起的徑向畸變(k1,k2,k3)、鏡頭組光心裝配誤差引起的偏心畸變(p1,p2)、像素的長寬尺度比例因子,以及像平面x軸和y軸不正交引起的像平面畸變(b1,b1)。采用十參數模型,則像點的系統誤差可以采用下式來表達
(2)
(3)
2 絲線測量方案
以粒子加速器磁鐵預準直中常用的振動線為代表的絲線測量為例,本項目采用單相機多站位的方法對振動線進行攝影測量。振動線為直徑0.1 mm的金屬線,通過絲線夾持機構固定在預準直平臺上。為了提高現場測量的適應性,采用自標定法對相機系統誤差進行補償。首先,加工建立一個標定平臺,標定平臺由底板、標定板及基準座組成,標定板和基準座固定在底板上,標定板及基準座的位置關系事先通過高精度的影像儀測得。然后,在對振動線位置進行測量時,將標定平臺放置在振動線下方,相機在不同的方位對振動線和標定板同時進行拍攝,通過標定板提供的高精度控制點坐標,結合對點和線的亞像素特征提取,采用自標定光束法平差對相機進行標定及絲線整體求解,從而得到振動線在標定平臺坐標系下的空間位置。最終,將振動線的位置引出到標定平臺的基準座上,基準座可以放置激光跟蹤儀反射球,從而將振動線引出供激光跟蹤儀或三坐標機等進行測量。如圖2所示。
2.1 標定板的選擇
標定板選用Halcon的AFT-MCT-HC50高精度標定板,其由光學玻璃制成,具有熱膨脹系數小、精度高的優點,有效尺寸為36 mm×36 mm×2 mm。該標定板由7×7個實心圓組成,每個圓直徑2 mm,圓心與圓心之間的距離4 mm。另外,標定板最外層圖案為一帶斜邊的方框,在點位識別時,用來對這49個點進行編號。圖3為標定板坐標系,在該坐標系下,這49個點的坐標精確已知,點位精度可達1 μm。
2.2 相機參數選取
為了能夠同時對絲線和標定板進行高質量的成像,同時滿足振動線10 μm的定位精度要求,對相機參數進行了分析,包括圖像傳感器的分辨率、像元尺寸大小、鏡頭焦距、光圈值等。
(1) 圖像傳感器的分辨率。系統定位精度10 μm及拍攝視場大小36 mm×36 mm,假設圖像特征提取定位精度能夠達到0.5個像素,則要求圖像傳感器的分辨率,即行或列的像素個數最少為0.5×36 mm/10 μm=1800。
(2) 圖像傳感器的像元尺寸。根據成像系統的縮放系數β=(像元尺寸×所占像元數)/絲線直徑,在β一定的情況下,像元尺寸越小,絲線所占的像素越多,則對于圖像特征的精確定位更有利;另一方面,在圖像特征所占的像元數一定的情況下,像元尺寸越小,則縮放系數β越小,系統成像的景深可以增大。被攝絲線直徑為0.1 mm,同時保證絲線在圖像上至少占5個像素,選擇圖像傳感器的像元尺寸大小為2.2 μm,此時β=0.11。
(3) 鏡頭的焦距及光圈值。景深ΔL的近似計算公式為
式中,δ表示容許彌散圓直徑;F表示鏡頭光圈值;f表示鏡頭焦距;L為物距。可以看出,景深與光圈值、彌散圓、物距成正比,與焦距成反比。為了保證合適的景深范圍,將光圈值設為F=22,彌散圓直徑取2個像元大小,即4.4 μm,結合系統的縮放系數β=焦距/物距,焦距為35 mm,物距為300 mm,則系統景深可達到14 mm,滿足拍攝要求。
最終,采用AVT工業相機G-503B,圖像傳感器為1/2.5″CMOS,500萬像素,分辨率2592×1944,像元大小2.2 μm;鏡頭為Computar工業鏡頭M3520-MPW2,焦距35 mm,最大光圈值22。
2.3 絲線測量方法
(1) 將標定平臺放置在需要測量的絲線下方,標定板與絲線距離小于5 mm;同時,使標定板的X或Y軸與絲線大致平行。在拍攝時,相機對焦在絲線上,工作距離約300 mm,這樣保證絲線和圓點都能拍攝清楚。
(2) 將相機固定在支架上,設置適當的快門,對絲線和標定板進行拍照,在拍攝的過程中可以采用光源輔助拍照,同時要注意相機與絲線之間的方位。
(3) 絲線位置解算,具體包括:①進行影像特征提取定位,包括點、線的提取定位;②相機的外方位元素近似值計算;③點和線的空間位置近似值計算;④自標定光3束法求解點、線的空間三維位置。
在空間直線的表達中[13-14],一般采用點向式來描述,參數較多,不方便參與平差計算。由于空間直線的自由度為4,因此,為了方便求取空間直線及結果展示,本文提出采用兩個已知平面X1=-12和X2=12,分別與空間直線相交于兩點Q1(-12,Y1,Z1)、Q2(12,Y2,Z2),則對空間直線的求解轉換為求取Q1、Q2點的坐標。
3 參數近似值計算
為了進行平差迭代求解,需要將共線方程線性化,因此在平差前需要計算各未知參數的初值,包括外方位元素、待定點坐標、待求直線位置。
3.1 外方位元素近似值計算
為了通過單張像片空間后方交會求得單張像片的外方位元素,即投影中心S的位置(XS,YS,ZS)及外方位角元素(φ,ω,κ),本文采用基于“以攝影中心為頂點的兩根構像光線的像方角應與其物方角相等”原理的角錐體法對相機進行定向[15-16]。
假設物方兩個控制點P1、P2通過攝像機得到的相應構像點為p1、p2,其像面坐標分別為(xp1,yp1)、(xp2,yp2),如圖4所示。
設投影中心S與像點p1、p2的距離分別為lSp1、lSp2,由余弦定理可知,直線Sp1與Sp2的夾角即像方角θp1p2為
(4)
同樣設投影中心S與物方點P1、P2的距離分別為LSP1、LSP2,直線SP1與SP2的夾角即物方角θP1P2為
(5)
式中,cosθP1P2=cosθp1p2。


(6)
(7)
(8)
3.2 待定點坐標近似值計算
得到像片的外方位元素的近似值后,通過線線前方交會的方法求取物方未知點空間坐標的近似值。由式(1)可得
(9)
對于包含待求未知點像點的每一張像片,均可以列出上述方程,轉換得到
為了求得未知點的近似坐標,該點至少在兩張像片上成像,當前方交會的像片多于2張時,則可以較為精確地求解出待定點近似坐標
3.3 待求直線近似位置計算
得到像片的外方位元素的近似值后,通過面面前方交會的方法求得待求直線空間位置的近似值[19-20]。
假設空間直線L在像片上對應的投影直線為l:ax+by+c=0。將共線方程式(2)代入上式,則可以得到過投影線l及投影中心S的平面Π
A(X-XS)+B(Y-YS)+C(Z-ZS)=0
對于包含待求直線圖像的每一張像片均可以列出上述方程,轉換得到
為了求得空間直線的近似位置,該直線至少在兩張像片上成像,通過兩個平面方程相交即可求得直線位置。當前方交會的像片多余2張時,對每一張像片,令X分別為-12和12,均可列出2個上述方程,則可以通過平差求解來較為精確地解算Q1、Q2點的近似坐標。
4 自標定光束法平差
采用自標定光束法平差對相機進行標定及空間點、線的求解,具體分為兩步:第一步為整體求解相機的內外方位元素和空間待求點坐標;第二步為多張像片交會求解空間待求直線的位置。
4.1 內外方位元素求解
光束法平差是基于共線條件方程式的,由式(2)可以看出,共線條件方程含有三類未知數:物方未知點坐標、攝站外參數和相機內參數。將像點坐標(x,y)視為觀測值,則誤差方程可寫為
V=BX+CY-L
(10)
式中,V為像點坐標的改正數;X、Y分別為物方未知點坐標、相機內外方位元素的改正數;L為常數項;B、C為系數矩陣。則式(10)法方程為
(11)
對式(11)采用逐點法化、消元法進行求解。假設有n個物方點,分別對第i點在所有像片上的相應像點的誤差方程進行單獨法化、消元,得到約化法方程式,將所有的約化法方程式相加,最終得到只包含相機內、外方位元素改正數Y的約化法方程,如式(12)所示。對約化法方程求解即可得到各像片的內、外方位元素。
(12)
4.2 待定點精確求解
利用多張像片的空間前方交會,逐點計算各待定點的物方坐標。由于已經求解出Y,因此式(10)可以寫為
Vi=BXi-Li
(13)
對于物方未知點Pi,將其在m張像片上的所有相應像點列出式(13)方程式,當此點在兩張以上的像片上成像時,可以用最小二乘平差解算出該點的坐標。對于其他物方未知點的求解按此方法進行。
4.3 待求直線精確求解
對于空間待求直線L上的兩點Q1(-12,Y1,Z1)及Q2(12,Y2,Z2),需要求取的未知參數為4個坐標分量(Y1,Z1,Y2,Z2)。將這兩點分別代入共線方程式(2),得到Q1、Q2對應的像點坐標q1(x1,y1)、q2(x2,y2),即
(14)
通過直線特征提取及定位,得到空間直線L在像片上對應的投影直線為l:ax+by+c=0。分別求得像點q1、q2到直線l的距離
(15)
V=BX-L
5 試驗驗證
為了驗證本文理論及方法的正確性,同時由于空間直線的精確位置不易獲得,本文采用標定板上兩點的連線代替直線進行空間直線求解驗證。詳細的試驗方法為:取標定板上的兩點P01和P49的連線作為待求直線L1,點P02和P48的連線作為待求直線L2;以P01像點和P49像點的連線作為直線L1的投影線,以P02像點和P48像點的連線作為直線L2的投影線。以P03—P47作為已知控制點,計算相機的內、外方位元素,以所有像片上直線L1的投影線和直線L2的投影線進行整體前方交會求解直線L1和直線L2的位置。具體計算過程如下:
(1) 圓心像素坐標提取。相機在多個位置拍攝標定板,總共拍攝16張像片。借助Halcon提供的函數庫,利用find_calib_object函數尋找矩形輪廓,并定位標定板位置;利用get_calib_data_observ_points函數尋找矩形框中的橢圓并編號,然后進行亞像素邊緣提取,對滿足條件的輪廓進行橢圓擬合;最終,得到各個點對應的像素坐標。
(2) 像素坐標輸入。將每張圖像中所有的像點及投影線列出形成一個文本文件,如圖5所示。圖5中像片Frm01列出了點P03—P47的像點坐標,以及構成投影線L1的兩像點坐標P01(370.367,716.563)、P49(1 393.172,1 503.491)、構成投影線L2的兩像點坐標P02(524.092,669.494)、P48(1 241.274,1 520.331)。

(16)
待求直線L1由(-12,Y1,Z1)、(12,Y49,Z49)兩點來表示,待求直線L2由(-8,Y2,Z2)、(8,Y48,Z48)兩點來表示,對組成兩條直線的4點的坐標分量求解即得到這兩條直線的空間位置。將平差得到這4點坐標與理論值進行對比,差值見表1。
6 結 語
本文對采用攝影測量技術進行絲線空間三維絕對位置高精度測量方法進行了研究,從拍攝硬件及解算方法上進行了詳細論述,最終,采用標定板上的兩點來模擬代表直線,通過對標定板的實際拍攝來驗證直線測量精度。從表1可以看出:點位橫向Y測量精度比高程方向Z略高,這與攝站交會角度有關;同時,通過實測坐標與理論坐標對比,點位坐標分量差值最大為3.1 μm,這表明本文方法的測量精度非常高,驗證了本文方法的正確性。本文的研究及試驗為下一步真正的絲線高精度空間絕對位置測量打下了基礎。
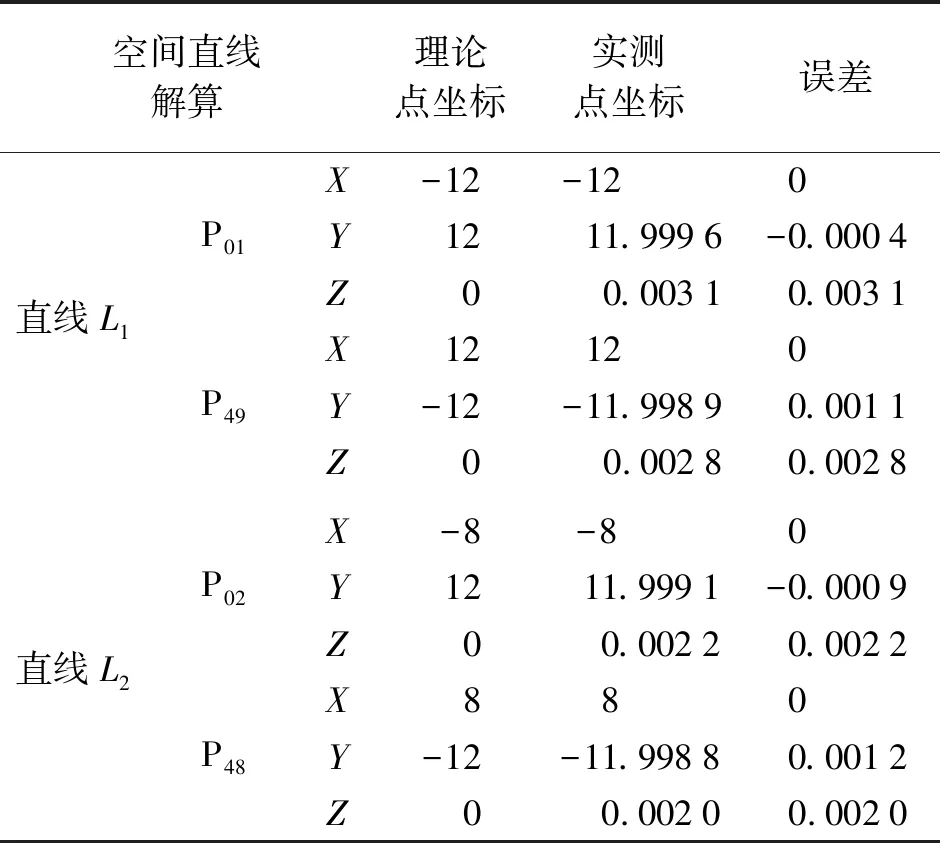
表1 直線求解精度驗證 mm
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00