電液提升裝置能量回收系統設計及分析
2019-10-16 05:38:20聶波,張進
中國工程機械學報 2019年5期
聶 波,張 進
(1.咸寧職業技術學院 工學院,湖北 咸寧 437100; 2.江蘇大學 機械工程學院,江蘇 鎮江 212000)
提升裝置的工作效率與環保節能效果密切相關,隨著限制全球變暖的排放標準變得日益嚴格[1],提高機器能源效率已經成為備受關注的問題[2-3].提高移動機械能源效率主要有兩個方面:一是提高能源的利用效率;二是實現能源的回收利用.移動機械工作中的兩種主要可回收的能量形式是動能和勢能[4],實現動能和勢能的有效回收,使移動機械能夠在原始能源的作用下運行更長時間.在移動機械領域,已經提出的能量回收形式可分為3種[5]:基于液壓蓄能器的能量回收系統;基于蓄電池或超級電容器的能量回收系統;基于飛輪的能量回收系統.利用勢能進行再生已經廣泛應用在電梯、挖掘機、起重機和叉車中[6-7].電動液壓叉車作為移動機械,具有能量轉換率高、操作靈活等特點,可實現貨物的叉取、升降和堆垛等操作,被廣泛應用在車間、食品、倉庫等對環境要求較高的作業場合.由于電動叉車的功率容量有限,初始成本高,因此,電動叉車的電能損耗尤為重要,電池的更換系統不具有時間效率[8-9].此外,提升裝置的提升功能和叉車的牽引力消耗了大部分能量.在設備的其他功能方面,沒有能量可回收,而且動能水平相當低,無法有效回收能源,更加迫切地關注電動叉車的能量效率[10].
學者們針對叉車負載和能量回收效率已經做了大量研究[11-13].但大多以現有液壓叉車結構為基礎,對于需要更高作業范圍需求的叉車,需要兩級提升作業,未從理論仿真和試驗相結合方面,深入研究叉車的節能效率.
本文以新型電動液壓叉車作為移動設備的研究對象,分析了叉車升降結構,基于叉車結構設計了能量回收系統,建立了各主要元件的數學模型,并在Matlab/Simulink中建立了能量回收仿真模型.從能量回收的角度,通過在能量回收系統中使用不同的下降速度和有效載荷,對不同提升區的節能率進行了研究,研究了不同提升區的節能效果,分析了兩個不同的提升區之間的差異,以期提高叉車的能量利用率,最大限度地實現能量回收利用.
1 系統組成
1.1 叉車升降結構
為滿足更高的作業范圍需求,將電動叉車的提升機構設計為兩級提升裝置,如圖1所示.分為第1提升區(自由提升區)和第2提升區,自由提升區通過一個單作用液壓缸完成,第2提升區通過兩個并聯的單作用液壓缸實現.第2提升區液壓缸固定在叉車底座上,自由提升區提升裝置可隨第2提升區液壓缸的伸縮發生相應的位置變化.
1.2 能量回收系統
為實現升降過程中能量的回收,本文設計了電液提升能量回收系統,以最大限度實現勢能回收,其系統原理如圖2所示.
電液提升能量回收系統主要由控制系統、供電系統、液壓系統和執行系統4部分組成.控制系統主要實現對壓力、高度、電流、電壓信號的采集和處理.供電系統為液壓系統提供驅動能量,傳統液壓叉車依靠鉛酸蓄電池提供能量,本實驗裝置電能來自電網的直接轉矩控制(Direct Torque Control,DTC)伺服驅動轉換器,而不是蓄電池.采用一種固定開關頻率的改進型DTC,控制永磁同步電機驅動器,該驅動器直接操作泵.通過改變液壓泵/馬達的轉速實現提升系統的速度控制.
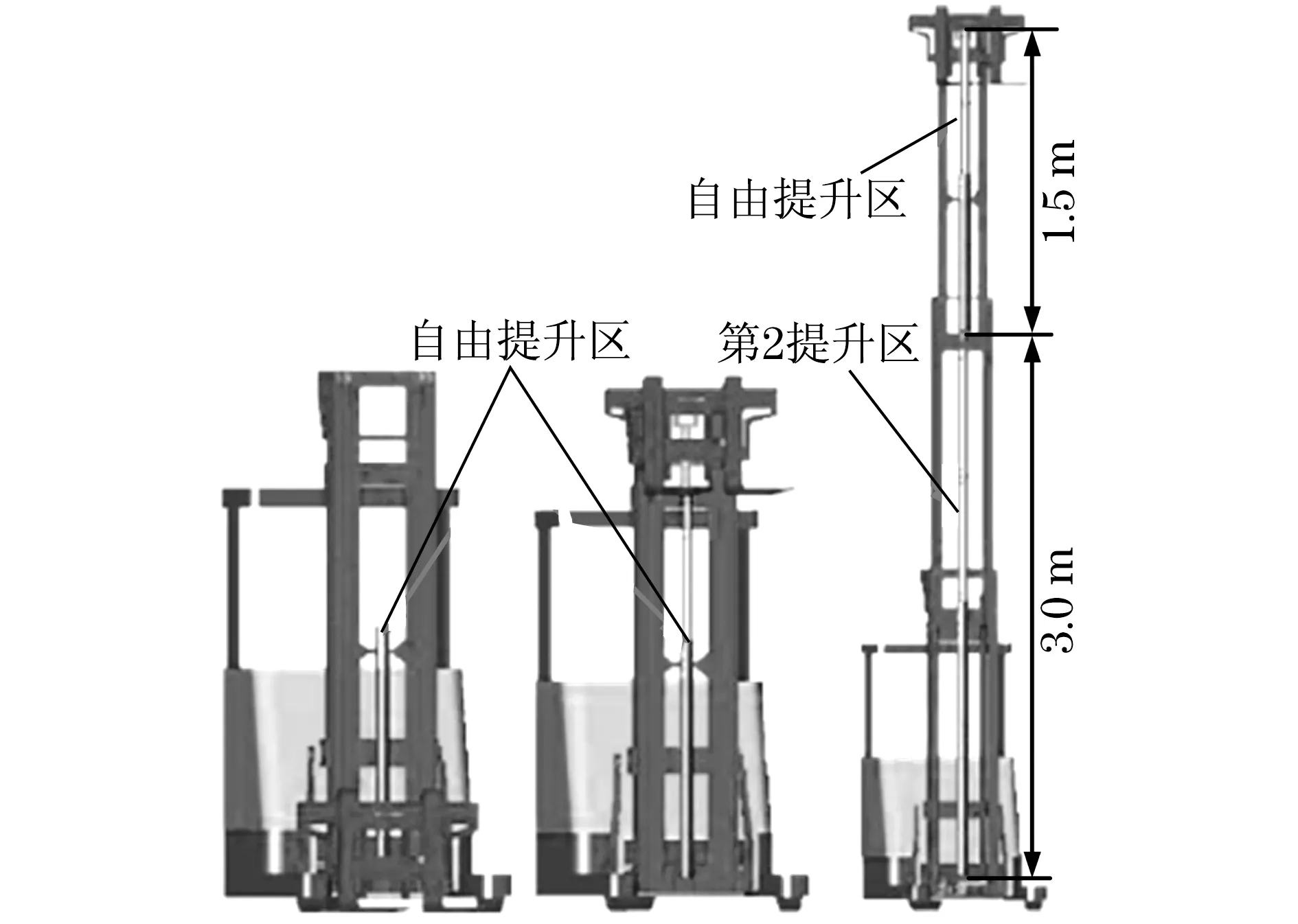
圖1 新型叉車升降結構Fig.1 New lifting structure of forklift truck
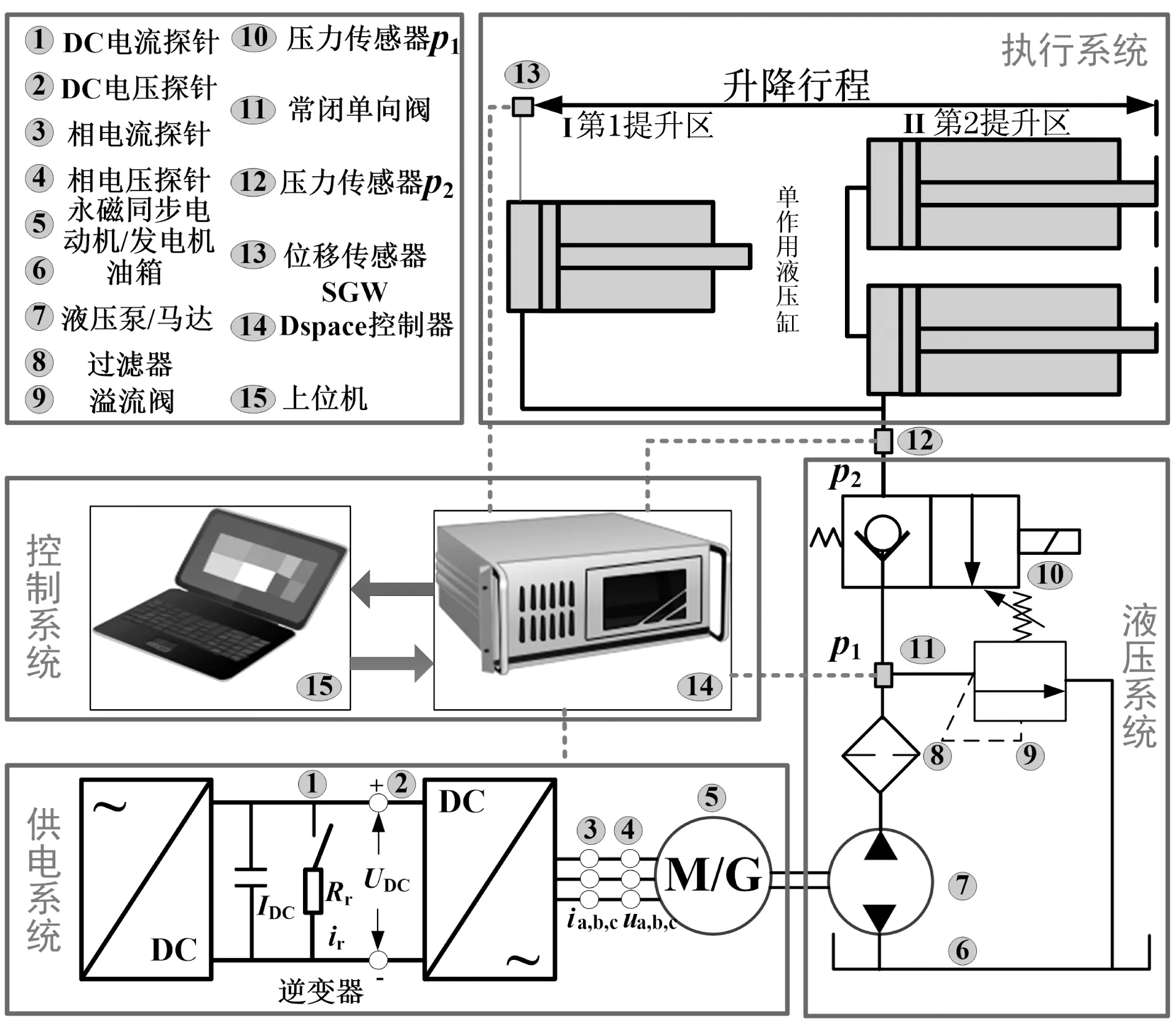
圖2 電液提升能量回收系統Fig.2 Electro-hydraulic lifting energy recovery system
液壓系統為執行系統提供能量,液壓系統中包含的兩位常閉單向閥,可防止叉車臂意外下降.執行系統包含第1液壓缸和第2液壓缸,液壓活塞連接在兩個主要的垂直桅桿上.為進一步降低能量損耗,在整個液壓系統中,未使用換向閥或調速閥作用速度控制元件,直接通過調節電動機的轉速實現提升區液壓缸流量和速度的控制.
本研究中采用雙向液壓泵/馬達作為能量轉換元件.在提升過程中,作為液壓泵元件,永磁同步電動機驅動液壓泵工作,消耗能量;下降過程中,作為液壓馬達元件,依靠重力勢能驅動馬達旋轉,進而帶動永磁同步電動機發電,將電能儲存在逆變器中,實現能量回收.永磁伺服電動機的額定效率遠高于90%,具有極低的開關和導通損耗,因此,可進一步的提高能量回收率.
2 數學模型建立
電動叉車能量回收系統是一種混合系統,為了得到提升區升降過程中的能量效率和節能率,建立電動機、液壓缸和液壓泵的數學模型,進一步建立了能源效率和節能率模型.
2.1 電動機模型
電動機是影響叉車勢能回收的主要因素之一,因此,有必要建立電動機的控制模型,提高電動機的能量轉化效率.帶有轉子表面安裝磁體的永磁同步電動機的轉子可以被認為是非凸,并且假定在通過電動機中心的任何軸上都有相同的磁阻.因此,永磁同步電動機的電流向量計算公式為
(1)
式中:ia,ib,ic為瞬時相電流.
電流向量可以分解為d軸分量id和q軸分量iq.
定子d軸和q軸的繞組磁鏈計算公式為
式中:ψPM為永磁磁鏈;Lsd,Lsq為d軸和q軸磁鏈系數.
d軸和q軸的電壓計算公式為
式中:Rs為電動機電阻;ωm為電動機角速度;ψsd為d軸繞組磁鏈;ψsq為q軸繞組磁鏈.
在額定工況下,電動機參數為Rs=0.193 Ω,Lsd=Lsq=0.31×10-3H.這些參數依賴于電動機的工作點,但電動機參數的不確定性并不是整個系統的主導因素,因此,在本仿真中這些參數是恒定的.
電動機角速度ωm與轉子實際轉速Ω相關,計算公式為
(6)
式中:p=3為極對數數目.
非凸極永磁同步電動機的電磁轉矩公式如下:
(7)
加速度是由電磁轉矩和負載轉矩之間的差異以及負載與電動機的組合慣量等因素決定,其計算公式為
(8)
式中:TL為負載扭矩;Jeq=Jp+Jm為總等效轉動慣量,其中,Jp=1.1×10-3kg·m2為負載組合慣量,Jm=88.2×10-4kg·m2為電動機組合慣量.
空間矢量表示通常忽略鐵損耗,并且不容易將鐵損耗電阻與磁化電感并聯.因此,本文給出了氣隙損耗的簡化表達式,并利用減小的端電壓計算了鐵損耗,即
(9)
式中:us為磁電壓;Lm為磁化電感;Lsσ為非凸極磁化電感;RFe(f)為磁化電阻.
當機器頻率變化時,鐵損電阻隨時間的變化而變化,本文假定損耗隨頻率平方而變化.
2.2 液壓缸模型
基于活塞運動方程和動態壓力方程,建立了單作用液壓缸的數學模型.根據流量連續性方程可得
(10)
式中:Be為體積模量,Be=1 400×106Pa;ps為系統壓力,Pa;V=V0+xpSp為液壓缸體積,m3;xp為活塞位移,m;Sp為活塞橫截面積,mm2;Qin為輸入流量,m3/s.其中,第1活塞橫截面積為Sp1=0.002 8 m2,初始體積為V0,第2活塞橫截面積為Sp2=0.002 6 m2.第1和第2活塞長度分別為Lcy1=0.88 m和1.82 m.
根據牛頓第二定律獲得活塞的運動方程如下:
(11)
液壓缸摩擦力方程計算公式為
(12)
式中:σ為液壓缸黏性摩擦;Fcou為庫倫摩擦;Fso為靜態摩擦;Cs為Stribeck摩擦;對于自由提升區σ=3 000,Fcou=0.1,Fso=600,Cs=11;對于第2提升區,σ=6 000,Fcou=2,Fso=600,Cs=11.
2.3 液壓泵模型
液壓泵流量方程可通過如下公式獲得:
(13)
式中:Q為泵輸出流量,m3/s;Vth=19×10-6m3/rev為泵的理論體積排量;ηvol=0.95為體積效率,是轉速和壓力的函數.
泵轉動的2階微分方程可表示為
(14)
式中:Tmotor為驅動力矩;Tp,th壓縮流體所需的理論力矩;Tf,p為摩擦力矩.
壓縮流體的理論力矩建模如下:
(15)
式中:ps為系統壓力;po為回油壓力.
液壓缸內的摩擦力矩計算公式如下:
Tf,p=TvΩ+sign(Ω)[Tcou+Tsoe-|Ω|/Cs]
(16)
式中:Tv為泵黏性摩擦.
對于第1液壓缸,Tv=1,Tcou=0.1,Tso=300,Cs=11;對于第2液壓缸,Tv=10,Tcou=0.5,Tso=300,Cs=11.
2.4 能源效率模型
叉車升降過程中能源效率η(t)與輸入、輸出能量相關,在時間間隔[t1,t2]內,可定義為
(17)
式中:Eout,Ein分別為[t1,t2]時間段內的總輸出能量和總輸入能量.
2.5 節能率模型
叉車的節能率主要與升降過程中消耗能量、回收能量相關,為了研究不同提升區效率,將節能率ηr定義為
(18)
式中:E1為無能量回收時叉車的能耗;E2為具有能量回收時叉車的能耗.
在提升系統中,叉車能量消耗計算公式分別為
式中:Em為電動機輸入能量;ηinv為逆變器轉換效率,假定為常數92%;Er為回收能量;ηsc為超級電容器的放電效率.
電動機輸入能量Em和回收能量Er的計算公式如下:
式中:iabc,uabc為用傳感器探針測量的電動機端相電流和相電壓;ir,ur分別為測量的電阻段電流和電壓.
因此,節能比ηr可根據下式重新計算:
(23)
3 結果分析
為了驗證本文所提模型的正確性,同時研究不同因素下的節能效果,在Matlab/Simulink中建立了電動叉車提升系統的微分方程,通過對比仿真和實測結果,證明所建立模型的正確性.并進一步分析了不同下降速度和不同有效載荷下,新型電動叉車的節能效果.
3.1 模型正確性驗證
在提升過程中,永磁同步電動機驅動功率為10 kW,有效載荷為800 kg,自由提升區液壓缸伸出量為1.5 m,第2提升區液壓缸伸出量為3.0 m.下降過程中,控制貨叉速度為0.2 m/s,第2提升區和自由提升區液壓缸先后復位到初始位置.獲得不同提升區仿真和試驗結果各參數如圖3和圖4所示.
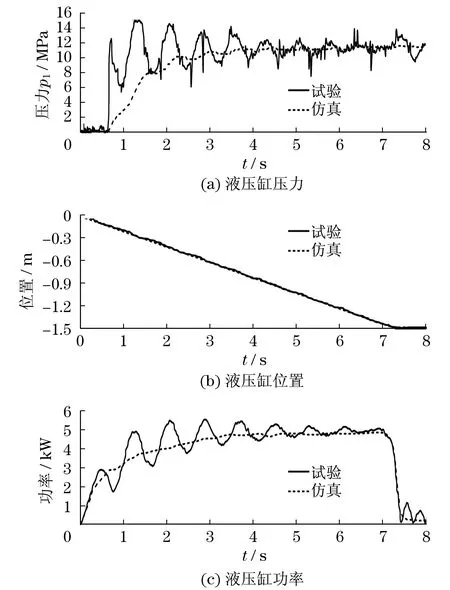
圖3 自由提升區仿真和試驗結果Fig.3 Simulation and test results of free lifting zone

圖4 第2提升區仿真和試驗結果Fig.4 Simulation and test results of the second hoisting zone
由圖3和圖4可以看出:當第2提升區液壓缸運動到最低位置和自由提升區液壓缸突然啟動下降運動時,會產生劇烈的振蕩.在兩液壓缸交叉控制過程中需要更流暢的控制.基于仿真和試驗結果,獲得自由提升區和第2提升區各參數統計結果,如表1所示.
自由提升區、第2提升區仿真及試驗結果誤差均控制在5%以內,證明了所建立數學模型和仿真模型的正確性.
此外,第2提升區的勢能是自由提升區的2倍,但第2提升區回收能量約為自由提升區的3倍.大部分的回收能量發生在第2提升區,自由提升區、第2提升區回收率分別為49.5%和67.2%.
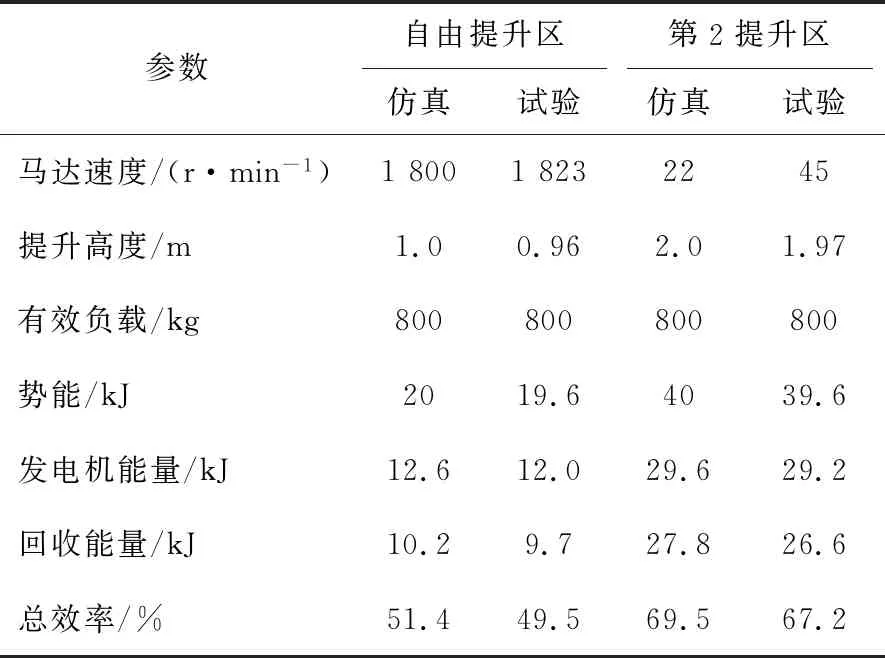
表1 不同提升區仿真和試驗結果對比Tab.1 Comparison of simulation and test results in different hoisting zones
3.2 節能率影響因素分析
為進一步研究不同參數下的本文所提模型的節能效果,對下降速度和有效負載下的節能率進行了研究,以期獲得最佳的控制參數.
在不同速度和有效載荷下,自由提升區和第2提升區的節能率如圖5所示,統計結果如表2所示.假設兩提升區貨物的提升和下降操作時間均為10 s,且提升總高度相同.

圖5 不同速度和有效載荷下節能率Fig.5 Energy-saving rate under different speeds and effective loads

表2 不同速度和有效負載下節能率Tab.2 Energy-saving rate under different speeds and effective loads
表2中可以看出:在相同負載下,自由提升區和第2提升區節能率均隨著下降速度的增加而減小.這是因為在最低轉速(0.2 m/s)時,電氣損耗占主導地位,發電效率降低;在最高轉速(0.6 m/s)下,液壓流體摩擦損失占主導地位.與電氣損耗相比,液壓流體摩擦損耗要遠大于電氣損耗,因此,其能量損失更大,導致節能率隨速度的變化而降低.
在相同下降速度下,自由提升區和第2提升區節能率均隨著有效載荷的增大先增大后減小,節能率并非與有效載荷呈正比關系.這是因為隨著有效載荷的進一步增大,整個回收系統液壓系統功率增大引起發熱量增大,改變了液壓系統和電氣系統的參數,導致回收效率發生下降.
此外,在相同速度和有效負載下,第2提升區的節能率始終高于自由提升區,進一步說明了能量回收主要發生在第2提升區.
從表2可以看出:在自由升降區,在0 kg有效載荷下,下降過程由于負載較小,液壓缸伸出量保持不變,沒有油液通過液壓馬達,無能量回收,必須依靠外力將貨叉恢復初始位置,所有的勢能都轉化為熱能損失;在第2提升區下降階段,液壓泵/馬達在所有情況下都處于馬達工況下,即使有效載荷為0 kg,同樣具有能量轉化,其節能率相當高.
4 結語
針對傳統電動叉車能源利用率低的問題,本文提出了一種適合于更高作業范圍新型電動叉車.設計了叉車能量回收系統,分析了能量回收系統工作原理,推導了各元件的數學模型及節能率模型.為了證明所建立數學模型的正確性,同時研究不同因素下的節能效果,在Matlab/Simulink中建立了電動叉車提升系統的微分方程,通過對比仿真和實測結果,證明了所建立模型的正確性.分析了不同速度和有效載荷下兩個不同提升區之間的節能率差異.結果表明:在自由升力區,節能率從0%~49.5%不等;在第2提升區,節能率在23.6%~67.2%之間,系統最大節能效果發生在第2提升區.通過合理調整升降速度和有效負載,可補償液壓系統的損失,說明本文所提回收方法是可行的.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
時代英語·高二(2015年1期)2015-03-16 00:08:11