基于目標(biāo)檢測結(jié)果的輪廓及顏色識別研究
2019-10-16 09:06:52余化鵬楊新瑞成都大學(xué)信息科學(xué)與工程學(xué)院四川成都610106
成都大學(xué)學(xué)報(自然科學(xué)版) 2019年3期
余化鵬, 李 舟, 楊新瑞, 劉 雷(成都大學(xué) 信息科學(xué)與工程學(xué)院, 四川 成都 610106)
0 引 言
隨著深度學(xué)習(xí)相關(guān)領(lǐng)域的發(fā)展,實時目標(biāo)檢測相關(guān)技術(shù)也迅速發(fā)展起來.在目標(biāo)檢測結(jié)果的基礎(chǔ)上,目標(biāo)的輪廓提取、顏色識別則是進一步完成目標(biāo)屬性識別的重要環(huán)節(jié).對于復(fù)雜場景下的目標(biāo)輪廓提取,基于深度學(xué)習(xí)的實時目標(biāo)檢測系統(tǒng)通常能較好地標(biāo)出物體的位置矩形框,但目標(biāo)檢測系統(tǒng)本身就采用了深度學(xué)習(xí)方法,如輪廓提取再次使用深度學(xué)習(xí)方法,需要的計算資源過大,對于實時目標(biāo)檢測系統(tǒng)來說,其代價難以承受.深度學(xué)習(xí)方法還可能導(dǎo)致識別結(jié)果有誤,學(xué)到錯誤的特征.而且,深度學(xué)習(xí)的方法依賴大量有標(biāo)定的數(shù)據(jù)集,這部分工作通常只能由人力完成,輪廓識別的準(zhǔn)確度依賴于數(shù)據(jù)集標(biāo)定的準(zhǔn)確度,準(zhǔn)確的輪廓標(biāo)定需要消耗大量人力資源和成本.本研究通過手工標(biāo)定了700幅含有無人機輪廓的圖像,在Mask R-CNN[1]模型上訓(xùn)練出了無人機檢測和輪廓提取模型,檢測效果和精度合宜,但其輪廓提取需要耗費大量計算資源,其效率無法滿足實時系統(tǒng)的要求.
對于復(fù)雜環(huán)境下的目標(biāo)輪廓提取,本研究嘗試直接通過Canny邊緣檢測算法[2]、Marr-Hildreth[3]邊緣檢測算法對圖像進行檢測,雖能較好地提取圖像中的邊緣,但無法定位哪部分邊緣是屬于感興趣的目標(biāo),難以使用底層數(shù)字圖像處理的方法.背景區(qū)域和目標(biāo)區(qū)域在數(shù)字圖像的層面并沒有本質(zhì)區(qū)別,無法直接用底層方法加以區(qū)分.
實時目標(biāo)檢測系統(tǒng)能檢測出目標(biāo)所在位置并標(biāo)定矩形框,在此矩形框中的圖像主要部分即為物體的主體(即圖像的尺度近似等于目標(biāo)的尺度),其圖像范圍已經(jīng)縮小,然而基于深度學(xué)習(xí)方法的輪廓提取并沒有很好地利用這個先驗知識.為此,本研究在結(jié)合了多種基于數(shù)字圖像處理的算法后,提出了一種基于目標(biāo)檢測結(jié)果的輪廓提取方法.在已有目標(biāo)輪廓的情況下,目標(biāo)的顏色也易于識別.本研究通過對輪廓內(nèi)包圍的像素點在HSI顏色空間下進行統(tǒng)計,識別目標(biāo)主體顏色.本研究首先將檢測結(jié)果(與目標(biāo)尺度大致相當(dāng))的圖像提取出來,將其灰度化后用Canny邊緣提取算法進行初步輪廓提取.同時,為減少噪聲所帶來的誤差、將目標(biāo)的主體提取出來,進行多次形態(tài)學(xué)閉操作使邊緣主體部分?jǐn)U大,隨后在形態(tài)學(xué)閉操作后的圖像中尋找最大輪廓,將其繪制并傳入顏色識別模塊.
1 Canny邊緣提取原理
首先考慮如何將輸入的圖像轉(zhuǎn)換為灰度圖?目前,常見的三原色RGB圖像轉(zhuǎn)為灰度圖的算法有3種,本研究采用的是較廣泛使用的一種.任何顏色都由紅、綠、藍三原色組成,如某點的顏色為RGB(R,G,B),其灰度圖像對應(yīng)的點的灰度值gray為,
gray=R×0.3+G×0.59+B×0.11
(1)
由式(1)計算出灰度值,產(chǎn)生灰度圖像后, 本研究通過Canny邊緣檢測算法來初步提取圖像的輪廓.
Canny邊緣檢測算法基于3個基本原則:同時考慮查準(zhǔn)率與召回率,盡可能找到所有真實的邊緣,同時應(yīng)該盡量降低偽響應(yīng);邊緣點的定位誤差應(yīng)該低,真實邊緣中心與檢測器標(biāo)記為邊緣的點之間的距離應(yīng)該最小;僅檢測出單一邊緣點,對于一個真實邊緣點,檢測器應(yīng)僅檢測并返回一個點,而在只有一個單一邊緣點的位置,檢測器不應(yīng)返回多個邊緣點.
Canny邊緣檢測算法在數(shù)學(xué)層面表達了此3個基本原則,具體如下:
1)令f(x,y)表示輸入圖像,G(x,y)表示高斯函數(shù),
(2)
用G和f的卷積形成一幅平滑后的圖像,

(3)
上述過程采用高斯濾波器將輸入圖像平滑.隨后,計算出該點的梯度幅值和方向,
(4)
和
(5)
2)通過計算出的梯度方向矩陣α(x,y)對梯度幅值矩陣M(x,y)進行非極大值抑制.首先將梯度方向離散化為4個方向,即上下、左右、正斜與反斜,以便對應(yīng)3×3鄰域.在梯度幅值矩陣M(x,y)中以點(i,j)為中心的3×3鄰域內(nèi)沿梯度方向α(i,j)進行比對,若點(i,j)處的梯度幅值M(i,j)大于梯度方向α(i,j)上與其相鄰的2個點,則認為點(i,j)是邊緣點,保持其梯度幅值不變,反之則認為它是非邊緣點,將其梯度幅值設(shè)置為0.
3)用雙閾值處理和連接分析來檢測并連接邊緣.首先選取高閾值TH和低閾值TL,隨后遍歷整個圖像.若某點(i,j)的梯度幅值M(i,j)低于TL,則此點為非邊緣點;若某點(i,j)的梯度幅值M(i,j)高于TH,則此點為強邊緣點;若某點(i,j)的梯度幅值M(i,j)低于TH且高于TL,則此點為弱邊緣點.對于弱邊緣點,對其8鄰域像素進行判斷,若其鄰域內(nèi)存在邊緣點,則將該弱邊緣點視為邊緣點,反之則視為非邊緣點.最后,輸出最終的邊緣圖像.
需注意的是,應(yīng)用Canny邊緣檢測算法時,如雙閾值設(shè)置過高,會導(dǎo)致本屬于目標(biāo)主體的輪廓未被檢測出;如雙閾值設(shè)置過低,會導(dǎo)致噪聲和背景產(chǎn)生的干擾輪廓過多,難以與屬于目標(biāo)主體的輪廓相區(qū)分.故本研究在應(yīng)用Canny邊緣檢測算法時高低閾值比選取為2∶1,充分考慮了上述兩方面問題,取得了較好的平衡.
2 形態(tài)學(xué)閉操作與尋找最大輪廓
在上述得到的圖像中,本研究已經(jīng)初步地通過Canny算法提取了圖像中的輪廓.因目標(biāo)尺度與圖像大小大致相當(dāng),本研究設(shè)想提取其中的最大輪廓即為目標(biāo)的輪廓.但在大多數(shù)情況下(即有少量背景干擾),上述操作提取到的輪廓實際上是由多個線段組成的不連通的輪廓,這些線段標(biāo)出的輪廓有些屬于目標(biāo)輪廓的一部分,另一些則屬于背景和噪聲.在數(shù)字圖像的層面上,無法較好地將背景、噪聲和目標(biāo)主體區(qū)分開來,如果直接在此圖像尋找最大輪廓,提取到的輪廓通常僅表示目標(biāo)主體的一部分,誤差較大.如何連接屬于目標(biāo)主體的多個輪廓,同時又排除背景與噪聲產(chǎn)生的輪廓,是本研究考慮的重點.由目標(biāo)主體組成的輪廓線段位置相近,背景輪廓又通常位于圖像邊緣并且離目標(biāo)主體較遠,這是一個很好的先驗信息,因此本研究通過多次形態(tài)學(xué)閉操作[4-7],將這些互不相連的屬于目標(biāo)主體的輪廓線段相連接,同時通過控制結(jié)構(gòu)元大小,如此的操作并不會將背景和噪聲產(chǎn)生的輪廓與目標(biāo)輪廓相連.
閉操作會平滑輪廓的一部分,彌合較窄的間斷和細長的溝壑,消除小的孔洞,填補輪廓線中的斷裂[8].用結(jié)構(gòu)元B對集合A的閉操作,可表示為A°B,其定義如下,

(6)
(7)

(8)
通過多次形態(tài)學(xué)閉操作,將目標(biāo)中互不連接的主體輪廓線段相連,形成了一個由包圍面積較小的背景、噪聲輪廓和包圍面積較大的目標(biāo)主體輪廓組成的二值圖像.隨后通過調(diào)用OpenCV中的findContours函數(shù)實現(xiàn)尋找圖像中的最大輪廓,其輪廓搜索方法是由Suzuki等[9]提出的一種基于二值圖像外輪廓搜索的方法.此方法會對圖像中所有像素點進行搜索,生成多個輪廓.本研究將提取的多個輪廓按輪廓包圍的面積進行比較,取面積最大的輪廓即是目標(biāo)主體的輪廓.
由此,本研究應(yīng)用的取最大面積輪廓算法步驟如下:
輸入:多個輪廓λ1,λ2,…,λn.
輸出:最大面積輪廓λmax.
1)從輸入輪廓中讀取下一個輪廓λnow;
2)如最大面積輪廓標(biāo)號λmax為空,則λmax=λnow,否則將λmax的輪廓包圍面積與λnow的輪廓包圍面積進行比較,如λnow的輪廓包圍面積更大,則λmax=λnow;
3)如λnow已是最后一個輪廓,結(jié)束流程,輸出λmax;否則跳至步驟1.
本研究提出的輪廓提取算法基于以下原則:算法時間復(fù)雜度應(yīng)相對較低,這是由實時系統(tǒng)的特性決定的;算法要良好地利用“目標(biāo)大致尺度已經(jīng)由實時目標(biāo)檢測系統(tǒng)給定”這一先驗知識;輪廓提取精度應(yīng)遠高于直接應(yīng)用底層數(shù)字圖像處理的方法.
由此,本研究提出的基于目標(biāo)檢測結(jié)果的目標(biāo)輪廓提取算法步驟如下:
輸入:目標(biāo)檢測結(jié)果圖像(圖像大小與目標(biāo)尺度大致相當(dāng).
輸出:目標(biāo)輪廓.
1)將輸入圖像轉(zhuǎn)為灰度圖;
2)將此灰度圖應(yīng)用Canny邊緣提取算法;
3)對步驟2中輸出的圖像進行3次形態(tài)學(xué)閉操作;
4)對步驟3中輸出的圖像應(yīng)用取最大面積輪廓算法搜索最大輪廓;
5)輸出此最大輪廓,即為本算法提取的目標(biāo)輪廓.
3 顏色識別
RGB系統(tǒng)通常用來描述顏色,其與人眼強烈感知紅、綠、藍三原色的事實能很好地匹配,但不能很好地適應(yīng)實際解釋的顏色.HSI顏色空間在彩色圖像中從攜帶的彩色信息(色度和飽和度)里消去強度分量的影響,這種顏色空間對人來說是自然且直觀的[10],因此本研究采用HSI顏色空間來描述圖像.從RGB到HSI的彩色轉(zhuǎn)換公式為,

(9)
式中,
(10)
飽和度分量為,
S=1-(3/(R+G+B))[min(R,G,B)]
(11)
強度分量為,
I=1/3(R+G+B)
(12)
本研究通過下述過程完成顏色識別:首先,將僅含有目標(biāo)輪廓的圖像通過填充算法將目標(biāo)區(qū)域填充為白色,將背景區(qū)域填充為黑色,形成一個二值圖像(該二值圖像與原圖像的長寬相同),以便于下一步的顏色識別操作.通過實驗發(fā)現(xiàn),目標(biāo)主體顏色通常取決于中心部分顏色,因為邊緣部分通常與背景有混淆.故本研究在顏色識別過程中將前述步驟得到的填充后圖像應(yīng)用了形態(tài)學(xué)腐蝕操作,進一步縮小輪廓范圍,提高顏色識別準(zhǔn)確率.最后,對上述處理后的二值圖像進行遍歷.如果顏色為白色的像素點,則對原圖中相應(yīng)的點通過上述HSI顏色空間的方法進行顏色判定,并根據(jù)顏色范圍表計入黑、灰、白、紅、橙、黃、綠、青、藍、紫,進行統(tǒng)計.通過實踐發(fā)現(xiàn),無人機圖像中由于背景等原因,盡管有些無人機并不是黑色或灰色的,但其黑色和灰色的統(tǒng)計量會顯著升高從而影響判定,因此本研究經(jīng)驗性地將黑色和灰色的統(tǒng)計量權(quán)值降低為原來的2/3.通過驗證發(fā)現(xiàn),這樣做能顯著降低非黑色非灰色圖像誤判為黑色或灰色,同時不會使本是黑色或灰色的圖像誤判為其他顏色.通過統(tǒng)計10種顏色分類的值,其統(tǒng)計值最高的一個顏色,即為目標(biāo)主體的顏色.
綜上所述,本研究提出的顏色識別算法步驟如下:
輸入:目標(biāo)圖像,目標(biāo)圖像類別,目標(biāo)輪廓圖像.
輸出:目標(biāo)顏色.
1)將輪廓圖像填充;
2)對步驟1中輸出的圖像應(yīng)用形態(tài)學(xué)腐蝕操作;
3)對于步驟2中輸出圖像的每個像素點m:如果m為白色,則檢測目標(biāo)圖像中對應(yīng)點的HSI空間下的顏色,將其納入10種顏色的數(shù)量統(tǒng)計值;否則認為該點是背景,對下一個點繼續(xù)檢測;
4)如目標(biāo)圖像類別是無人機圖像,則經(jīng)驗性地將黑色和灰色統(tǒng)計量降權(quán)為原來的2/3;
5)分析10種類別顏色的統(tǒng)計值,輸出統(tǒng)計值最高的顏色.
4 結(jié)果、評價與對比
本研究選取了真實場景下的無人機、小汽車和人3類目標(biāo)進行測試,建立了用于驗證本研究算法的測試集,共有圖像405幅,其中有無人機目標(biāo)180幅、小汽車目標(biāo)152幅及人目標(biāo)101幅.本研究選取2個重要指標(biāo)進行比較,即提取目標(biāo)輪廓所需時間和目標(biāo)輪廓交并比IoU(Intersection over Union),并將目標(biāo)輪廓內(nèi)的像素點視為集合,計算手工標(biāo)定的真實輪廓與算法提取的輪廓之間的IoU.
本研究用C++在Visual Studio 2017平臺上實現(xiàn)了下述3種算法,并進行了對比實驗:用Canny算法提取輪廓;用Mask R-CNN[1]算法提取目標(biāo)的輪廓;用本研究提出的算法基于目標(biāo)檢測結(jié)果提取輪廓.
本研究在第1種算法和第3種算法下選取的Canny雙閾值均為40,80;在第2種算法下選取的最小置信度為0.9.實驗中采用的部分圖像及其輪廓提取結(jié)果如圖1所示.圖1中,第1、2排為無人機圖像;第3排為人圖像;第4、5排為小汽車圖像.圖1中,提取到的輪廓已被疊加至原圖,矩形框是YOLO實時目標(biāo)檢測系統(tǒng)標(biāo)定的目標(biāo)范圍矩形框,即本研究進行輪廓提取的圖像區(qū)域.

圖1 本研究算法得出的部分結(jié)果
3種算法的對比如圖2所示.
圖2中,Canny算法得出的結(jié)果沒有矩形框標(biāo)定,是因為Canny算法無法定位哪部分是待提取輪廓的目標(biāo).
本研究采用的計算機配置與環(huán)境是Windows 7操作系統(tǒng)、NVIDIA GeForce GTX 960圖形適配器、IntelXeon E3-1231 CPU及16 GiB內(nèi)存.上述3種算法的對比實驗結(jié)果如表1所示.

圖2 3種算法對比
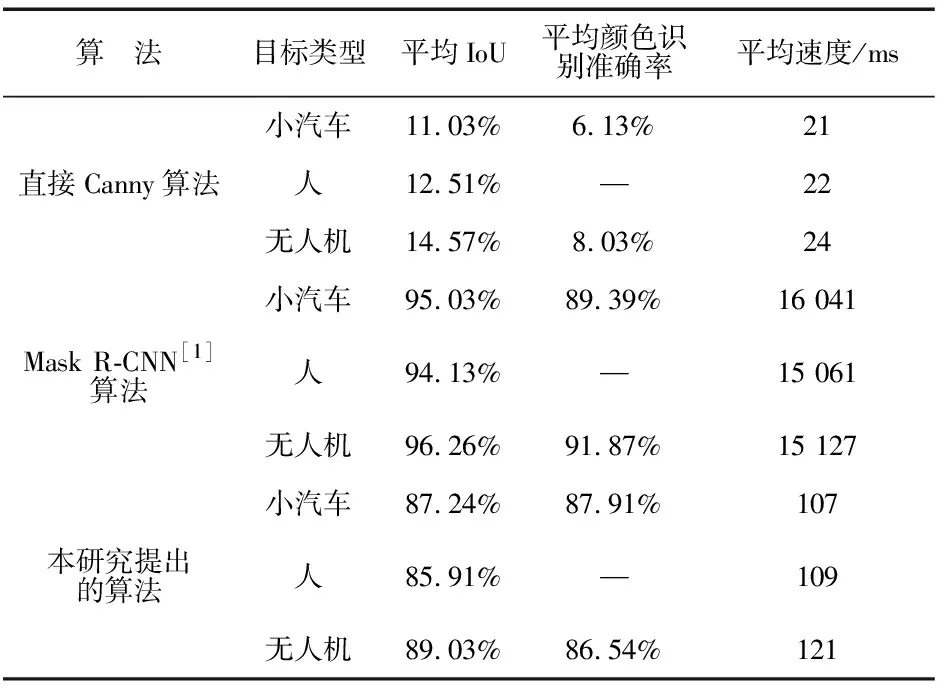
表1 實驗結(jié)果
需要說明的是,本研究采用的實時目標(biāo)檢測系統(tǒng)是通過YOLO[11]實現(xiàn)的,在平均速度指標(biāo)統(tǒng)計中,已經(jīng)包含了通過YOLO獲取目標(biāo)檢測結(jié)果的時間.
對于本研究提出的算法,無人機和小汽車這2類目標(biāo)的顏色都有主體顏色,識別其顏色有應(yīng)用價值;但人這一目標(biāo)有膚色、服裝顏色等不同顏色特征,通過本研究的算法識別的顏色沒有顯著的應(yīng)用價值,故沒有納入統(tǒng)計范圍.
由圖1、圖2和表1可見,在3組算法中,直接Canny算法提取輪廓的效率很高,但其輪廓平均交并比與顏色識別正確率很低,其原因是Canny找到的輪廓是整個圖像的輪廓,而不是待檢測目標(biāo)的輪廓.Mask R-CNN[1]算法提取輪廓的精度很高,輪廓平均交并比與顏色識別正確率都非常高,但其識別平均速度非常慢,難以應(yīng)用于實時系統(tǒng)上.本研究提出的算法輪廓平均交并比與顏色識別正確率略低于Mask R-CNN[1]算法,但運行速度遠快于Mask R-CNN算法.
5 結(jié) 論
本研究通過基于目標(biāo)檢測結(jié)果的圖像進行了輪廓提取和顏色識別.對于輪廓提取,本研究采用的結(jié)合實時目標(biāo)檢測系統(tǒng)的數(shù)字圖像處理方法在速度上數(shù)百倍快于目前廣泛使用的深度學(xué)習(xí)方法,精度數(shù)倍高于直接應(yīng)用的底層數(shù)字圖像處理方法,能較好地滿足實時系統(tǒng)中輪廓提取對效率和精度的要求.
由于通過像素統(tǒng)計的方法得出的值是所有局部信息相加的結(jié)果,然而人的視覺系統(tǒng)是一個很復(fù)雜的系統(tǒng),例如一部分人眼認為是白色的無人機,放大后查看每個像素點,確實又有很大一部分是灰色的,這符合本研究的算法結(jié)果,但與人眼直覺有一定的差距,未來的工作需要更深入地研究人類視覺系統(tǒng)對整體信息的理解.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
南大法學(xué)(2021年3期)2021-08-13 09:22:32
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
自然與文化遺產(chǎn)研究(2016年2期)2016-05-17 05:53:59
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12