精密加工平臺隔振系統多頻振動控制
2019-10-19 01:42:20賴俊杰白俊峰楊澤寧代鎮宇
振動與沖擊 2019年10期
賴俊杰,浮 潔,白俊峰,楊澤寧,代鎮宇,余 淼
(重慶大學 光電工程學院 光電技術及系統教育部重點實驗室,重慶 400044)
近年來,隨著精密加工與精密測量等技術的發展,微振動對精密加工精度和測量靈敏度的影響變得十分突出。現實環境中由于交通工具、人員走動、儀器設備運轉和空調氣流等因素不可避免的會產生振動干擾,雖然振動位移幅值在微米量級(加速度幅值在毫米每平方秒量級),但這些振動通過地面傳遞至精密平臺后,輕則降低加工精度及測量靈敏度等,重則可能引起儀器設備誤觸發、誤動作而導致重大生產事故[1]。而在實際工作中,精密設備常見振動頻率為1~100 Hz[2],且常為多頻振動。
磁流變彈性體隔振器控制是發揮其隔振性能、實現工程應用的關鍵,目前對該問題的研究尚處于探索階段。根據控制算法與系統模型之間的關系,控制算法可分為依賴于模型的控制算法和不依賴于模型的算法兩大類。作為依賴于模型的控制策略,Lyapunov控制[12]、clipped-optimal 控制[13]、LQR(Linear Quadratic Regulator)控制[14]、H無窮控制[15]和滑模控制[16]等已被應用于MRE隔振系統的控制中。但其要求系統模型和隔振器逆模型已知,對于具有較強非線性的MRE隔振系統而言,很難建立其精確的系統模型。因此,在實際應用中不容易獲得滿意的隔振效果。PID(Proportion Integration Differentiation)控制、ON-OFF控制和模糊控制等不依賴于模型的控制策略為上述問題提供了有效的解決方法。PID控制器對確定激勵振動有好的抑制效果[17],但其魯棒性差,不適于具有時變激勵的隔振系統。ON-OFF控制器簡單有效、易于實現,但其只有開和關兩種狀態,易引起被控系統的振蕩。Jung等[18]針對用于建筑結構的MRE橫向隔振系統,設計了模糊控制器,并通過仿真表明負載位移和加速度分別可以下降40.7%和39.1%。Li 等[19]針對用于三層建筑結構的MRE隔振系統設計了模糊控制器,通過實驗驗證了控制方法的有效性。由于精密加工平臺在實際工作中的干擾常為多頻振動,上述模糊控制器僅對單頻激勵有效,對多頻振動難以達到滿意的控制效果。Fu等[20]針對MRE隔振系統設計了模糊控制器,通過實驗驗證了控制方法對單頻和多頻振動的有效性。但所設計的控制器未能實現多頻振動下的最優控制。
針對以上分析,本文提出分頻模糊控制方法,即通過帶通濾波器組對誤差信號通過窄帶濾波實現信號的分頻,進而對分離的單頻信號分別設計模糊控制器進行分頻模糊控制。并通過實驗驗證控制算法的有效性。所提方法無需建立MRE隔振系統的精確模型且易于實現。
1 磁流變彈性體隔振系統動力學模型
MRE隔振系統對應的單自由度動力學模型,如圖1所示。圖中k0和c0分別為MRE隔振器的零場剛度和零場阻尼激勵磁場引入的剛度增量;FMRE和Δc分別為隔振器的零場阻尼和激勵磁場引入的阻尼增量;m為負載質量;x1和x2分別為基礎位移和負載位移。系統動力學方程滿足
(1)
式中:FMRE為激勵磁場作用下MRE隔振器產生的驅動力。
MRE隔振器的半主動控制條件可概括為
(2)
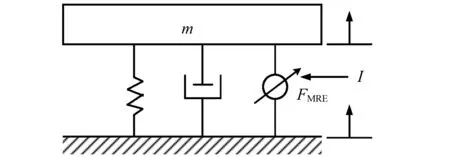
圖1 MRE隔振系統單自由度動力學模型Fig.1 MRE vibration isolation system with one degree of freedom dynamics model
根據文獻[21]所列方法可以求得MRE隔振器零場參數,如表1所示。
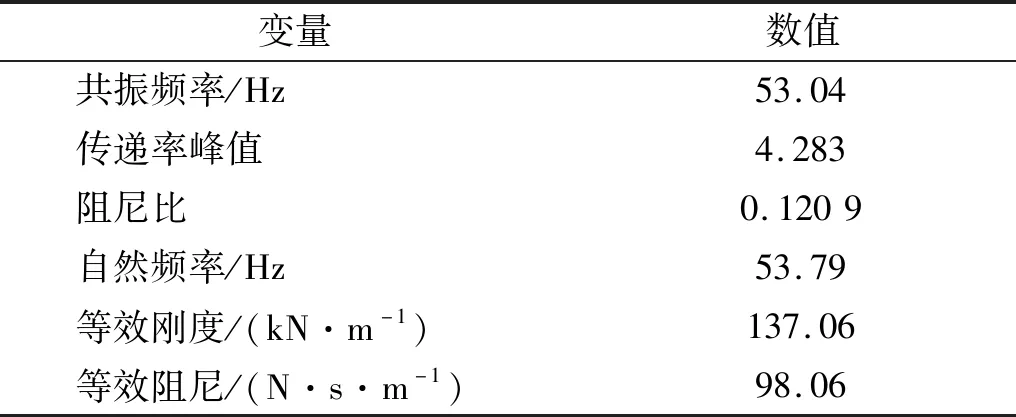
表1 零場狀態MRE隔振器參數辨識結果Tab.1 Zero field state MRE isolator parameter identification results
2 分頻模糊控制器設計
針對多頻振動干擾控制問題,設計如圖2所示的分頻模糊控制器。多頻加速度誤差信號經過不同帶通濾波器后被分離為多路單頻加速度信號,然后針對單頻信號分別進行模糊控制器控制,分頻模糊控制后輸出控制電壓。
2.1 窄帶帶通濾波器設計
如圖2所示帶通濾波器在系統中有兩個作用:①濾除信號傳輸過程中的噪聲干擾;②分離多頻信號。本文選取有限沖擊響應(Finite Impulse Response,FIR)濾波器,為減少實時控制系統中振動加速度信號幅值失真對控制效果的影響,帶通濾波器通帶區內采用波動幅度為0.3 dB的等紋波設計。
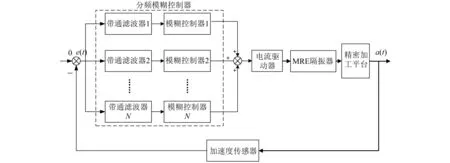
圖2 精密加工平臺分頻模糊控制器控制系統Fig.2 Precision processing platform frequency-division adaptive fuzzy controller control system
2.2 模糊控制器設計
本文將MRE隔振器的半主動控制條件融入模糊控制器的模糊規則中,采用模糊控制器實現MRE隔振器的半主動控制。以負載響應的絕對位移x1和負載與基礎間的相對位移xr作為控制器的輸入,以MRE隔振器的勵磁電流I作為控制器的輸出,主要分為精確量的模糊化、依據規則庫的模糊邏輯推理和模糊量的反模糊化三個環節。
2.2.1 模糊化
模糊控制器的輸入為負載的相對位移和絕對位移,是加速度傳感器采集到的信號進行積分的結果,模糊控制器的輸入經量化因子成比例縮放至輸入論域[-7,7]內,量化因子的取值由式(3)確定
(3)
式中:k1(t)和k2(t)分別為t時刻負載的絕對位移和相對位移所對應的量化因子;A0(t)和A1(t)分別為t時刻負載絕對位移和相對位移的幅值。再經過模糊化處理,利用輸入隸屬度函數將輸入量的精確值轉化為相應的模糊量D和RD,其中輸入隸屬度函數如圖3(a)所示。考慮到過多的語言變量將增加系統的復雜度和計算量,而較少的語言變量將使系統精度降低,故選取NB,NM,NS,ZO,PS,PM,PB七個模糊語言變量對輸入隸屬度函數進行描述,其中NM,NS,ZO,PS,PM采用三角形隸屬度函數,NB和PB采用高斯型隸屬度函數。每個輸入變量的論域均被隸屬度函數劃分為具有重疊區域的相鄰間隔,既保證了控制過程中的靈敏度,又保證了控制過程中的穩定性。
2.2.2 模糊規則及模糊推理
本文中模糊控制器的模糊規則是基于所推導的MRE隔振系統半主動控制條件設計而成,如表2所示,共包含49條模糊規則。模糊規則通常由一系列關系詞連接而成,可表述為:
R1:IfDisPBandRDisPBthenUisNB
R2:IfDisPBandRDisPMthenUisNB
……
其中,U為控制器的輸出值所對應的模糊子集。模糊推理是根據輸入模糊量,由模糊規則完成模糊推理來獲取模糊控制量的過程,本文中模糊推理采用Mamdani推理算法。
2.2.3 反模糊化
通過模糊推導所得到的控制量是模糊量,利用輸出隸屬度函數將輸出值的模糊量U轉化為相應的精確值u,其輸出隸屬度函數如圖3(b)所示。本文中所采用的反模糊化方法為常用的重心法。精確值u經比例因子進行適當縮放,即為MRE隔振系統半主動模糊控制器所輸出的控制電流
I(t)=k(t)sgn(u(t))u(t)
(4)

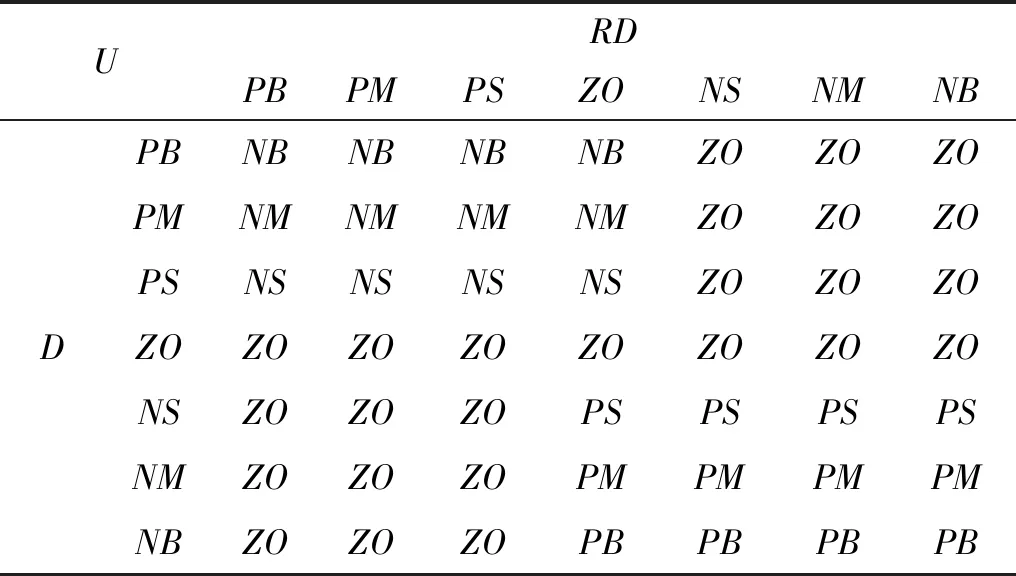
表2 MRE隔振器半主動模糊控制規則Tab.2 MRE isolator semi-active fuzzy control rules
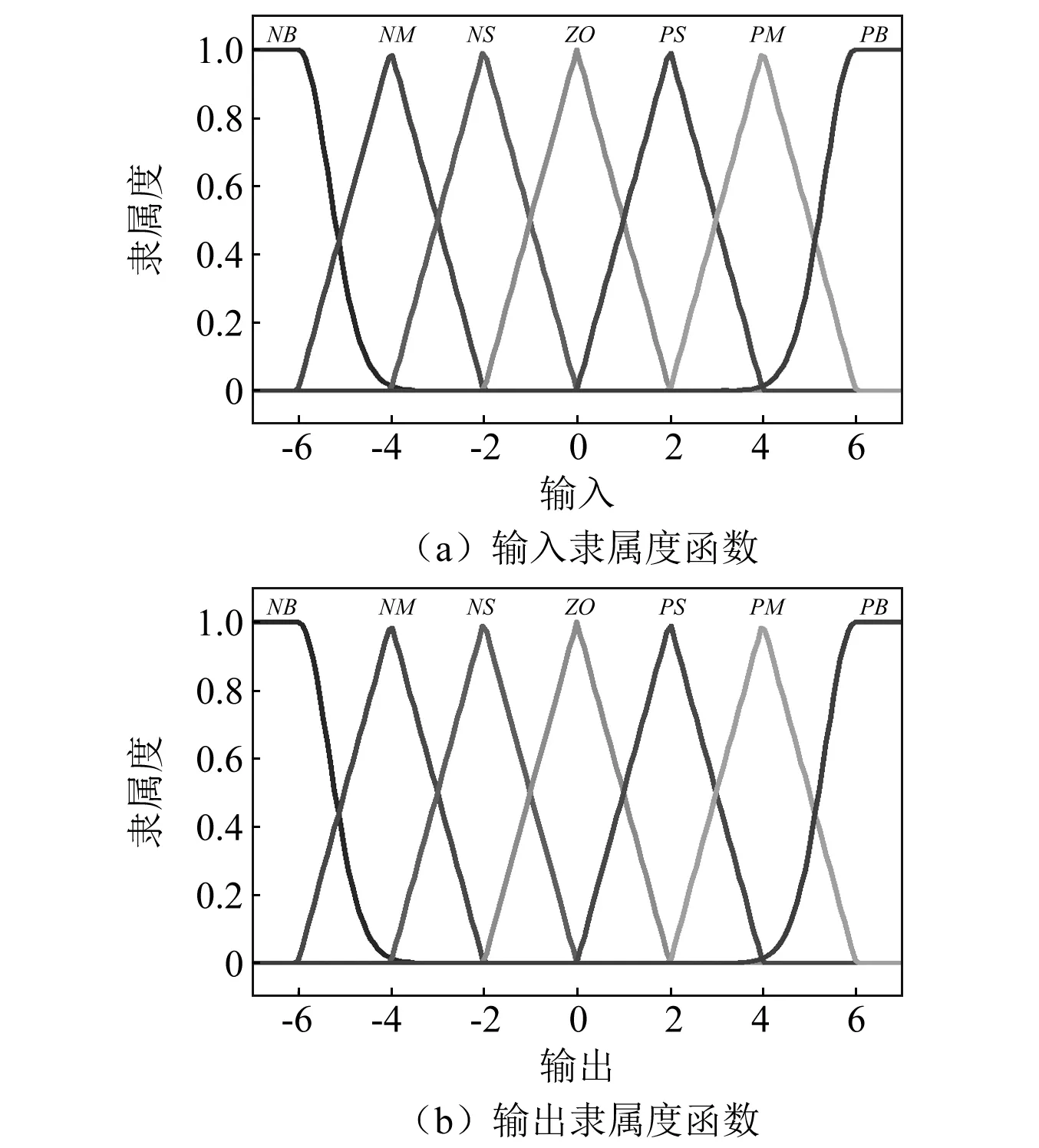
圖3 模糊控制器輸入輸出隸屬度函數Fig.3 Fuzzy controller input and output membership function
3 實驗結果及分析
3.1 實驗系統
MRE模糊隔振實驗系統如圖4所示。MRE隔振器安裝在電磁激振器(JZK-50型)臺面上,負載質量塊與隔振器的頂部通過螺桿連接。在Matlab/Simulink中搭建基礎激勵信號產生模塊,下載到dSPACE/Autobox半實物仿真系統(DS1005型)中輸出,經功率放大器(YE5874型,聯能電子,中國)放大后驅動激振器。兩個壓電式加速度傳感器(333B52型)分別安裝在激振器臺面和負載質量塊上以測量基礎激勵加速度信號和負載響應加速度信號。傳感器所測得的信號為電荷信號,通過信號調理器(480B211型)轉換為電壓信號,然后由dSPACE/Autobox進行采集。分頻模糊控制器輸出的控制電流通過電流驅動器施加給MRE隔振器,一個直流電源(E3631A型)為電流驅動器供電。
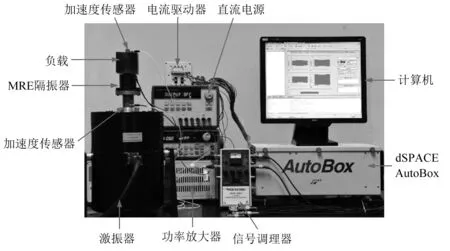
圖4 MRE隔振實驗系統實物圖Fig.4 MRE vibration isolation experiment system physical map
振動激勵源對隔振對象影響最大頻率點位于零場共振頻率附近,因此需對以53 Hz為中心頻率較寬頻帶內頻率點振動進行抑制。
3.2 實驗結果及分析
由于精密加工平臺所處的工況環境多為多頻混疊干擾,多頻振動激勵頻率單頻分量在零場共振頻率附近選定,為40 Hz,45 Hz,50 Hz,55 Hz,60 Hz,65 Hz和70 Hz任三頻率混頻、加速度峰值設定為1.0 m/s2。帶通濾波器參數如表3所示。分頻模糊控制下響應加速度及控制電流、不同控制算法下負載響應加速度信號及加速度頻譜圖,如圖5~圖9所示,分頻模糊控制算法下負載響應加速度的均方根值衰減最大可達30.58%。不同控制器下三種激勵頻率組的衰減率如表4所示。與常規模糊控制器相比,分頻模糊控制器相較于傳統模糊控制器對振動衰減性能最大增加了36%,即驗證了分頻模糊控制算法的優越性能。
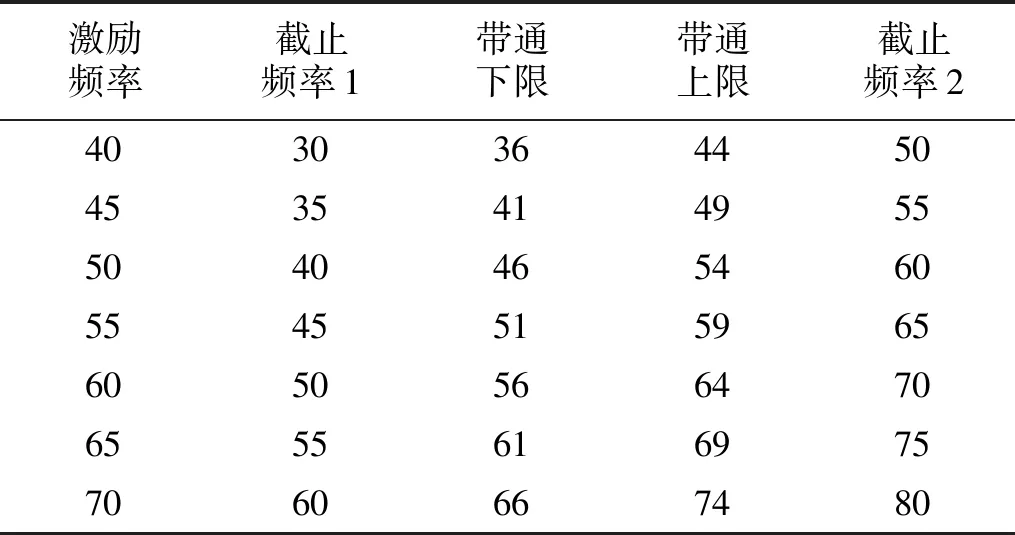
表3 各帶通濾波器參數設置(采樣頻率:2 kHz階次:1 012)Tab.3 Band-pass filter parameter settings(Sampling frequency:2 kHz order:1 012) Hz
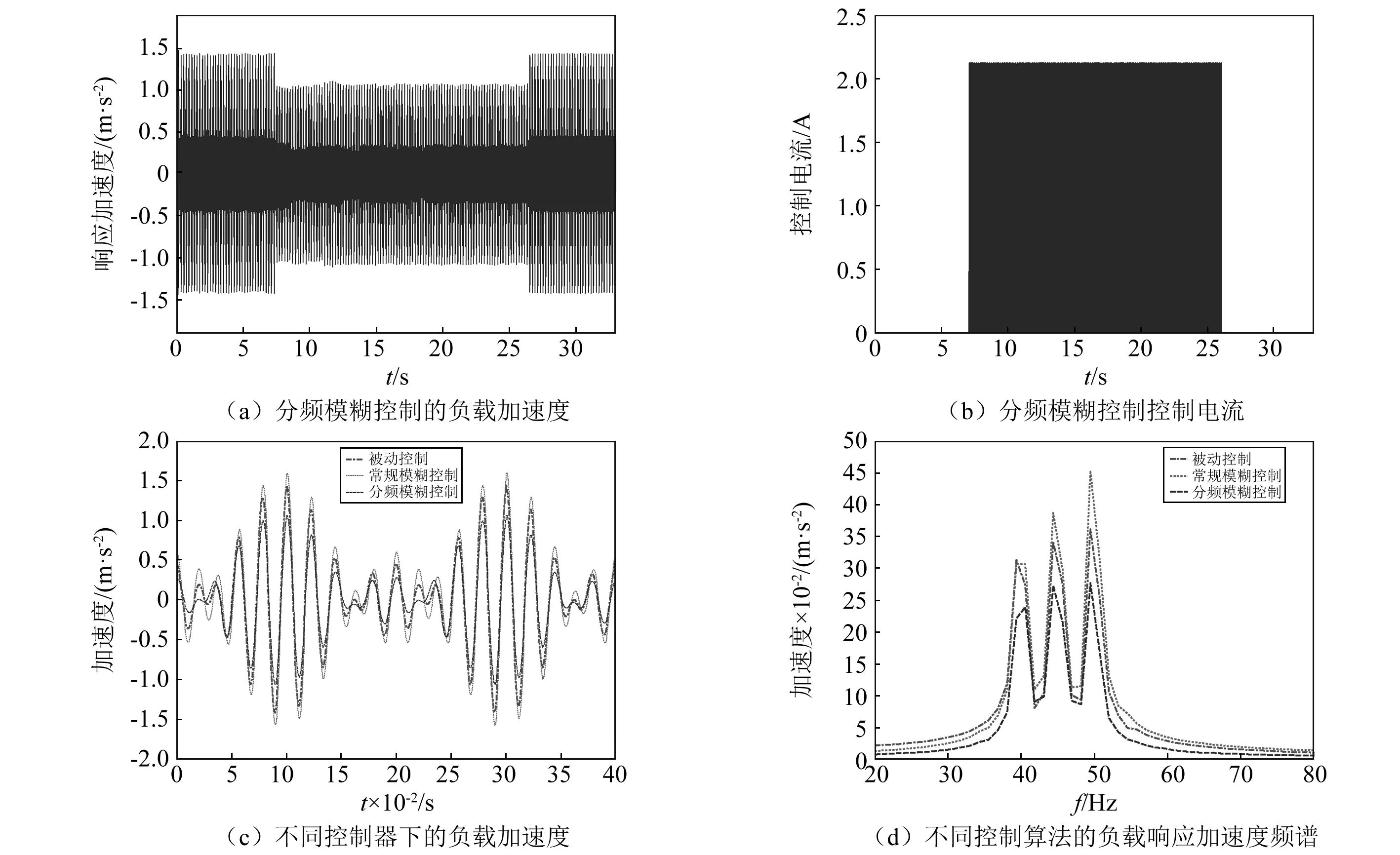
圖5 40 Hz+45 Hz+50 Hz多頻振動激勵下的試驗結果Fig.5 40 Hz+45 Hz+50 Hz multi-frequency vibration excitation test results
圖6 40 Hz+60 Hz+70 Hz多頻振動激勵下的試驗結果Fig.6 40 Hz+60 Hz+70 Hz multi-frequency vibration excitation test results
圖7 50 Hz+55 Hz+60 Hz多頻振動激勵下的試驗結果Fig.7 Test results of 50 Hz+ 55 Hz+ 60 Hz multi-frequency vibration excitation
圖8 55 Hz+60 Hz+65 Hz多頻振動激勵下的試驗結果Fig.8 55 Hz+60 Hz+65 Hz multi-frequency vibration excitation test results
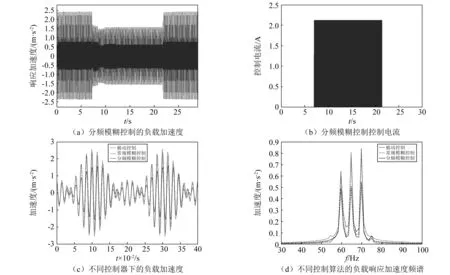
圖9 60 Hz+65 Hz+70 Hz多頻振動激勵下的試驗結果Fig.9 Test results under multi-frequency vibration excitation of 60 Hz+ 65 Hz+ 70 Hz

表4 三頻混疊激勵條件下各控制器控制效果Tab.4 Tri-band aliasing excitation conditions under the control of each controller
4 結 論
針對具有多頻激勵的精密加工平臺振動問題,本文提出分頻模糊控制方法。通過設計窄帶濾波器對多頻信號分頻處理,并針對不同分頻信號設計相應的模糊控制器。通過實驗表明所設計的分頻模糊控制器對多頻激勵振動抑制優于常規模糊控制器和被動控制,尤其對包含零場共振頻率附近頻率點的混頻激勵加速度傳遞率最大可衰減30%以上。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19