基于小擾動線性模型的橫側向各種模態特性的分析
2019-10-21 08:02:05李俊財王健
錦繡·上旬刊 2019年7期
李俊財 王健

摘 要:通過使用 Matlab/simulink 軟件,搭建仿真程序,實現對各種橫側向運動的模擬情況下的飛行器模型進行仿真。利用水平無側滑飛行條件φ=β≡0 和p=r≡0,可以將飛行器運動方程解耦為不依賴于縱向運動方程的橫側向方程。對該方程,進行小擾動線性化,可以獲得關于飛行器橫側向的線性動態方程。
關鍵詞:線性動態方程;特征值;仿真引言
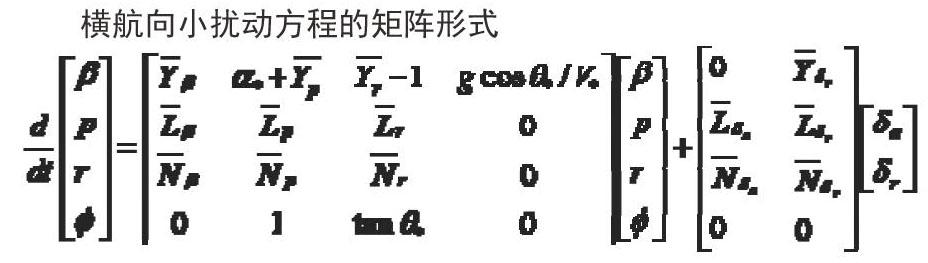
橫航向小擾動方程的矩陣形式
飛機是一個氣動力學的產物,由于其運動環境的特殊性,做出實物實驗的可能性低且成本較高,目前國內外都通過軟件仿真的形式來獲得其在特定條件下的運動數據,本文就基于小擾動線性模型的橫側向各種模態特性進行分析。
1 飛機縱向運動的各種模態
飛機的橫側向運動有滾轉模態、螺旋模態和荷蘭滾模態。
(1)滾轉模態
滾轉收斂模態是快速收斂的非周期運動。對應特征方程絕對值最大的實根,該模態是快速收斂的非周期運動。對于一般飛機,正迎角下往往具有較大的滾轉阻尼,而繞 ox 軸的慣性矩卻是三個自由度最小的,使飛機受擾動時引起的滾轉角速度很快在氣動阻尼力矩作用下消失。
(2)螺旋模態
飛行器在飛行過程中,橫側向容易發生的一種不穩定狀態,學術上稱為螺旋模態。這種運動模態的時間常數(周期)很大,是一種緩慢收斂或發散的運動,對飛機有一定的影響,應作為飛機設計的一項標準。
(3)荷蘭滾模態
荷蘭滾模態也稱為振蕩模態,是橫航向動穩定性的三種典型模態之一,對應于橫航向小擾動運動方程的一對復根。其主要運動特征是:滾轉阻尼運動結束后,滾轉角、側滑角和偏航角呈頻率較高的周期性變化。特點:飛機一面左右偏航,一面來回滾轉;飛機向左轉時,偏航角速度小于 0;基本處于右滾狀態,滾轉角大于 0。原因:飛機的航向慣性阻尼力矩與靜穩定力矩不平衡,引起繞 y 軸的振蕩運動,使側滑角周期變化,引起周期性變化的滾轉力矩,使滾轉角、滾轉角速度周期運動。
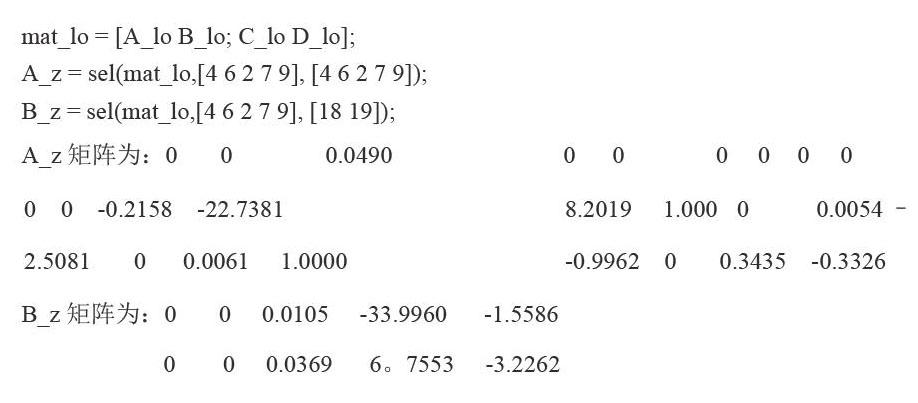
2 通過對橫側向線性模型矩陣的提取,得到橫側向線性模型的相應 A,B 矩陣
因為在實際橫側向運動中不依賴于偏航角(滾轉角,側滑角,滾轉角速率,偏航角速率),所以將第二個變量偏航角剔除得到相應的與四個變量相關的新矩陣
得到4個狀態量與2個控制變量,建立橫側向線性模型:
得A,B矩陣后,寫出4個狀態量同兩個控制變量的矩陣算法,得出結果。
3 根據已知的 A 矩陣計算橫側向模型的特征值:
eig(A)可得,有以下四個特征根:
-0.2450 + 2.8973i -0.2450 - 2.8973i -2.5560 -0.0105
4 計算各種模態的相應特征值并求解對應的周期、頻率和阻尼比:
(1)運用函數 damp 計算對應的頻率和阻尼比:[Wn,p,Z]=damp(A);可得到:頻率
Wn=2.9076 2.9076 2.5560 0.0105 阻尼比:0.0843 0.0843 1.0000 1.0000.
進而可得 3 種模態下的對應 T 和阻尼比以及特征值:
模態 ? ? ? 特征值 ? ? ? ?周期T 阻尼比
荷蘭滾 - 0.2450±2.8973j? 0.3439 0.0843
滾轉? ? - 2.5560 0.3912? ? ? 1
螺旋? ? ? ? - 0.0105 ? ? ? 95.5013 1
5 搭建仿真模型,對橫側向運動情況下的各個變量進行仿真:
給定四個變量初始條件分別為 x =[β,φ,p,r]T=[0.1? 0.2? 0.1? 0.1],給定輸入為階躍響應。
6 結論
(1)三組特征值對應了飛機橫側向運動的荷蘭滾模態、滾轉模態、螺旋模態。荷蘭滾模態周期短、阻尼大;滾轉阻尼模態對應了一個大的負根,受機翼產生的較大阻尼力矩的阻止而很快結束,一個小的正根對應著螺旋模態的特點。
(2)三種模態中各個變量的占比也不同,荷蘭滾和螺旋模態中通常包含著很小的側滑。荷蘭滾模態幾乎是圍繞著穩定坐標系 x 軸的純滾動運動,而螺旋模態則是由帶有滾轉運動的偏航運動組成的。螺旋模態通常是不穩定的,包含著不斷增加的偏航角和滾轉角以及向下增大坡度的螺旋運動。