沖壓模具與自動沖壓線的動態(tài)仿真研究
2019-10-21 09:40:02張偉孔凡彬周連國
科學(xué)導(dǎo)報(bào)·學(xué)術(shù) 2019年40期
張偉 孔凡彬 周連國

摘要:由于設(shè)備的諸多限制,自動沖壓線模具是設(shè)計(jì)中最困難的模具類型。在模具制造的初期,我們可以直接、簡單地驗(yàn)證和優(yōu)化沖壓件的工藝流程和模具設(shè)計(jì)結(jié)構(gòu)的合理性,改進(jìn)端部拾取器和模具的結(jié)構(gòu)設(shè)計(jì),消除碰撞干擾問題,提高生產(chǎn)效率。
關(guān)鍵詞:自動化沖壓生產(chǎn)線;仿真模擬;沖壓模具;端拾器;干涉檢查
目前,國內(nèi)汽車工業(yè)的快速發(fā)展,許多汽車制造商為了適應(yīng)水平,檔次的需要,迫切需要高水平的自動沖壓生產(chǎn)線,或現(xiàn)有的妙語自動化轉(zhuǎn)型,國內(nèi)有很多自動沖壓生產(chǎn)線幾乎全部從國外進(jìn)口。主要包括兩部分:自動沖壓線模具成形過程優(yōu)化分析和模具設(shè)計(jì),既能保證沖壓金屬板具有良好的成形質(zhì)量,并考慮工件、模具結(jié)構(gòu)和機(jī)制的干擾問題,傳統(tǒng)的設(shè)計(jì)方法基于靜態(tài)干擾曲線很難考慮復(fù)雜的運(yùn)動條件。
一、自動沖壓生產(chǎn)線使用現(xiàn)狀
為了滿足日益增長的汽車需求,中國的大型汽車廠采用了自動化沖壓生產(chǎn)線,以滿足快速生產(chǎn)的需要。自動化生產(chǎn)線在降低成本和提高產(chǎn)品質(zhì)量的同時(shí),使零件的沖壓過程能夠快速有效地進(jìn)行。工作期間自動沖壓生產(chǎn)線上的交通系統(tǒng),由沖壓自動化大體上是由工業(yè)機(jī)器人型鉸接式的6個(gè)自由度,具有以下優(yōu)點(diǎn):機(jī)器人搬運(yùn),完全避免了硬幣硬幣表面上的沖突這些傷害提高了車身覆蓋件的沖壓質(zhì)量,避免了制造過程中造成的身體傷害,使工人從事繁重、枯燥和危險(xiǎn)的工作。沖壓生產(chǎn)線實(shí)現(xiàn)非個(gè)性化生產(chǎn),結(jié)束了機(jī)床沖壓壓機(jī)過程中發(fā)生人身安全事故。
1.沖壓模具自動沖壓生產(chǎn)線工作流程。模具自動化生產(chǎn)線的一般流程為:拆垛→清洗噴油→對中→各工序模具沖壓→產(chǎn)品輸出。由叉車將料片放至堆垛裝置,采用磁力分離原理拆垛,料片被真空吸盤吸起,經(jīng)檢查無雙料片后,由磁性皮帶輸送料片至清洗噴油工序,然后在對中臺掃描對中后,機(jī)器人將料片抓起,放到第一序模具上,之后由機(jī)器人依次在各序模具間抓取、放置制件,由壓力機(jī)進(jìn)行沖,最后由傳送帶將產(chǎn)品件輸送出壓力機(jī)。
2.沖壓模具運(yùn)動仿真的主要內(nèi)容。沖壓模具運(yùn)動過程中主要有兩類干涉問題:一是模具結(jié)構(gòu)部件之間產(chǎn)生的干涉;二是模具實(shí)體與自動化生產(chǎn)線之間產(chǎn)生的干涉。運(yùn)動仿真系統(tǒng)的主要作用是模擬汽車模具的沖壓運(yùn)動過程,避免模具實(shí)物制造階段出現(xiàn)的真實(shí)干涉,減少裝配、修模、試模的次數(shù),減少經(jīng)濟(jì)損失,提高模具設(shè)計(jì)的可靠性,縮短模具開發(fā)周期,因此,運(yùn)動仿真是設(shè)計(jì)與制造的橋梁。
二、沖壓生產(chǎn)線的動態(tài)仿真
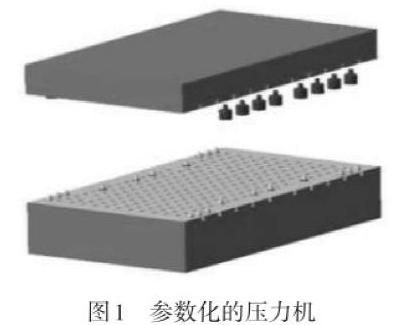
常見的自動沖壓線分為單機(jī)串聯(lián)沖壓線和大型多工位壓力機(jī)兩種,主要由以下部分組成:前端上料拆垛清洗涂油裝置、壓力機(jī)、尾端取料設(shè)備、自動送料機(jī)構(gòu)。自動送料機(jī)構(gòu)的種類較多:如橫桿式、機(jī)器人式、機(jī)械臂、SpeedBar、上下料機(jī)械手配穿梭小車等等。本文按照搬運(yùn)系統(tǒng)與壓機(jī)滑塊的運(yùn)動關(guān)系將自動沖壓線分為兩類:同步運(yùn)動控制送料機(jī)構(gòu)和信號互鎖控制送料機(jī)構(gòu)。沖壓生產(chǎn)線的動態(tài)仿真關(guān)鍵是在計(jì)算機(jī)里能夠構(gòu)建出準(zhǔn)確體現(xiàn)沖壓線幾何運(yùn)動特性的數(shù)字樣機(jī)。數(shù)字樣機(jī)在描述沖壓線的幾何特性時(shí),只考慮與模具設(shè)計(jì)相關(guān)的幾何特征。例如:壓力機(jī),只考慮它的滑塊、工作臺、壓板槽、滑塊行程、閉合高度等要素(見圖1)。在表達(dá)沖壓線的運(yùn)動規(guī)律時(shí),假定沖壓線中所有的運(yùn)動部件都為剛體。因每個(gè)剛體在三維空間皆有6個(gè)運(yùn)動自由度,3個(gè)沿坐標(biāo)軸線平移,3個(gè)繞坐標(biāo)軸線旋轉(zhuǎn),所以通過定量控制這6個(gè)自由度可以描述剛體在三維空間的任意位置和姿態(tài)。通過對壓機(jī)滑塊,搬運(yùn)系統(tǒng)的各個(gè)運(yùn)動部件機(jī)械運(yùn)動特性的分析,找出它們的運(yùn)動自由度類型及其數(shù)量,添加適當(dāng)?shù)倪\(yùn)動副,就能真實(shí)描述它們的運(yùn)動規(guī)律。例如:壓機(jī)滑塊做上下往復(fù)的直線運(yùn)動,只有一個(gè)平移自由度,對數(shù)字樣機(jī)的滑塊添加平移運(yùn)動副就可表達(dá)出壓機(jī)滑塊的運(yùn)動規(guī)律。
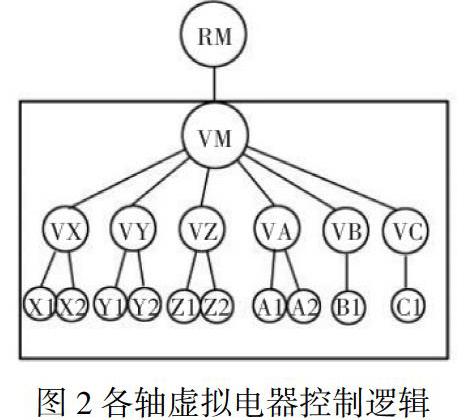
1.送料機(jī)構(gòu)采用同步運(yùn)動控制的沖壓線動態(tài)仿真。這類沖壓線的顯著特點(diǎn)是使用同步運(yùn)動控制技術(shù)控制滑塊連續(xù)運(yùn)動,送料機(jī)構(gòu)上下料操作與壓機(jī)滑塊運(yùn)動同時(shí)進(jìn)行,送料機(jī)構(gòu)的運(yùn)動軌跡比較固定,只有幾種形式。同步控制可以實(shí)現(xiàn)壓機(jī)與壓機(jī)之間的同步,壓機(jī)與送料機(jī)構(gòu)之間的同步。伺服驅(qū)動器采集反饋信號驅(qū)動伺服電機(jī)做高動態(tài)響應(yīng)的運(yùn)動,反饋信號是由安裝在壓機(jī)凸輪上的編碼器輸出的,在同步控制中這個(gè)編碼器就作為主軸,其它從軸隨這個(gè)主軸按照預(yù)先編輯的同步曲線運(yùn)動。運(yùn)動控制層級如圖2所示,RM代表壓機(jī)實(shí)軸,VM是虛擬主軸,VX、VY、VZ等代表送料機(jī)構(gòu)的送進(jìn),提升等運(yùn)動方向的虛擬軸,當(dāng)與壓機(jī)同步運(yùn)行時(shí),RM與VM耦合;當(dāng)送料機(jī)構(gòu)單獨(dú)運(yùn)行時(shí),RM與VM解耦合。
圖2各軸虛擬電器控制邏輯
沖壓線數(shù)字樣機(jī)同步運(yùn)動的實(shí)現(xiàn)邏輯與實(shí)際沖壓線的運(yùn)動控制邏輯類似,采用曲線驅(qū)動虛擬軸來控制送料機(jī)構(gòu)位置與壓機(jī)位置同步。本文采用的是圖2方框內(nèi)的控制模型,采用上述剛體自由度模型,VX、VY、VZ等虛擬軸直接用相應(yīng)的運(yùn)動副代替;VM作為全局同步控制器,直接輸入壓機(jī)、送料機(jī)構(gòu)各軸的運(yùn)動曲線并直驅(qū)各個(gè)運(yùn)動副,實(shí)現(xiàn)數(shù)字樣機(jī)與真實(shí)沖壓線的運(yùn)動一致性。沖壓線數(shù)字樣機(jī)建立起來就能仿真模擬整條沖壓線的真實(shí)運(yùn)行情況,可以詳細(xì)模擬零件的取放搬運(yùn)過程中及其與壓機(jī)、模具、空工位、機(jī)械手之間的干涉情況,不必到實(shí)際的沖壓生產(chǎn)線進(jìn)行反復(fù)調(diào)試。
2.送料機(jī)構(gòu)采用信號互鎖控制的沖壓線動態(tài)仿真。這類沖壓線一般都是在老式手動沖壓生產(chǎn)線改造而來,送料機(jī)構(gòu)的運(yùn)動軌跡沒有固定規(guī)律,變化多樣,但是各個(gè)軸都有一定的運(yùn)動范圍,例如采用機(jī)器人做搬運(yùn)系統(tǒng)的部分生產(chǎn)線。這種情況下數(shù)字樣機(jī)通常需要采用反向運(yùn)動學(xué)來求解沖壓線的真實(shí)運(yùn)行情況,運(yùn)動學(xué)反解的方法很多,在求解過程中,有些解在運(yùn)動范圍內(nèi)具有不確定性,產(chǎn)生多解。這種多解在實(shí)際運(yùn)動中的體現(xiàn)就是:機(jī)器人可以通過不同的運(yùn)動軌跡達(dá)到同一位置和姿態(tài),可使用適當(dāng)?shù)姆唇馑惴ǎ箼C(jī)器人達(dá)到最優(yōu)位姿和行走最短路徑,達(dá)到最優(yōu)的生產(chǎn)節(jié)拍。
3.模具的動態(tài)仿真。沖壓線的數(shù)字樣機(jī)能動態(tài)仿真壓機(jī)、送料機(jī)構(gòu)的運(yùn)動,但不能模擬一副模具內(nèi)部活動件的運(yùn)動,例如壓料板、CAM的運(yùn)動,也就不能發(fā)現(xiàn)模具內(nèi)部件的干涉問題。模具活動件的動態(tài)仿真難點(diǎn)是模擬各種CAM的運(yùn)動。CAM由驅(qū)動器、滑塊、滑塊底座3部分構(gòu)成,驅(qū)動器通過導(dǎo)滑接觸面驅(qū)動滑塊做各種需要的的運(yùn)動。如圖3所示,A為驅(qū)動器,B為滑塊,C為底座。CAM的運(yùn)動機(jī)構(gòu)類型較特別,驅(qū)動塊與滑塊之間形成的運(yùn)動副具有瞬時(shí)性,只在驅(qū)動器與滑塊接觸時(shí)才存在,不像普通的運(yùn)動副始終存在,而在模擬沖壓全過程時(shí)要求運(yùn)動副必須始終存在。為解決這一矛盾,需構(gòu)建虛擬的運(yùn)動副來滑塊的運(yùn)動,就是在滑塊取一點(diǎn)(B處)讓其始終在虛擬的滑塊曲線軌跡上運(yùn)動。
模具和沖壓線的動態(tài)仿真幫助沖壓工程師設(shè)計(jì)、仿真、優(yōu)化沖壓工藝,優(yōu)化模具結(jié)構(gòu)。所有的運(yùn)動部件按照它們真實(shí)的運(yùn)動軌跡運(yùn)行,做到離線安裝調(diào)試,有效地減少了設(shè)計(jì)更改時(shí)間,消除模具在線運(yùn)行碰撞干涉風(fēng)險(xiǎn)和不穩(wěn)定性。總之動態(tài)仿真技術(shù)的使用對提高模具的設(shè)計(jì)水平和自主開發(fā)能力將起到顯著作用,參與高端模具市場的競爭有著重要意義。
參考文獻(xiàn):
[1]張濤.轎車車身沖壓生產(chǎn)線加工過程的建模與仿真[J].機(jī)械設(shè)計(jì)與制造,2017,(3):49~52
[2]李學(xué)仁.沖壓模具與自動沖壓線的動態(tài)仿真研究[J].模具制造,2017,(11):44~48
[3]謝娜.自動沖壓線模具開發(fā)全過程仿真技術(shù)研究與應(yīng)用[J].模具技術(shù),2017,(2):5~57
[4]吳濤.同步運(yùn)動控制在沖壓自動化中的應(yīng)用[D].中國工控網(wǎng),2017.
[5]張小花.6自由度工業(yè)機(jī)器人在沖壓自動線中的應(yīng)用[D].合肥工業(yè)大學(xué),碩士論文,2017.
(作者單位:曲阜天博汽車零部件制造有限公司)