
戰斗機空戰指揮引導目標控制研究
2019-10-21 07:01:03范宣杰
大眾科學·上旬 2019年11期
摘 要:戰斗機控制指揮中,對于引導目標的準確控制是其中最為核心的指導問題。戰斗機的目標指揮引導,要對其戰斗機的運行進行約束和控制,同時保證引導的快速性和經濟性。本文針對空戰指揮中,戰斗機的目標引導特點,提出幾種空戰指揮中常用的引導目標控制方法,包括空戰決策建模法、戰斗機瞄準線穩定法,以及預警機引導法。通過這些方法,對空戰指揮中戰斗機的目標引導控制問題進行研究,從而提升戰斗機空戰指揮中目標引導控制的準確性。
關鍵詞:戰斗機;目標控制;空戰指揮
一、戰斗機空戰仿真決策建模
空戰決策建模是一種通過空戰仿真系統決策進行的復雜的系統仿真建模。這種決策建模方式涉及到物理領域的裝備模型、信息領域的態勢感知以及認知領域的指揮決策。通過這三個方面的融合建模,能夠利用緘默中的框架和決策接口完成對目標的鎖定和引導。通過正確空戰仿真決策建模,能夠捕捉和跟蹤目標,從而完成的戰斗機的目標引導指揮。
1.空戰仿真決策建模的流程
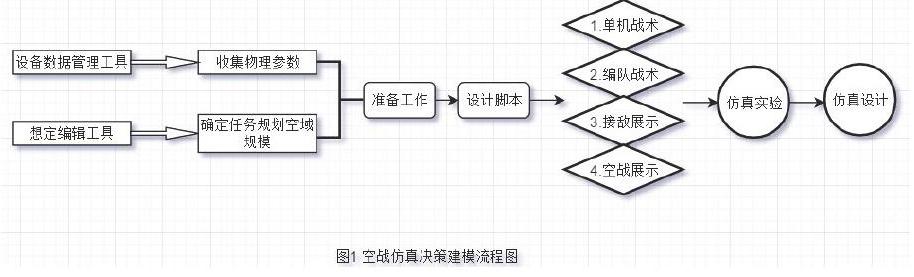
空戰仿真決策建模的流程首先是收集或設計戰斗機、導彈和雷達等空戰裝備的物理參數。然后,根據戰斗機目標任務,進行任務的確定,并規劃作戰空域以及編定編隊規模等。收集物理參數的數據準備工作,需要基于設備數據管理工具;確定任務及規劃空域、規模等工作,需要基于想定編輯工具。這兩個過程,屬于空戰仿真決策建模的準備工作。
在準備工作完成后,就可以針對此次任務進行設計腳本,主要的腳本內容為戰斗機的控制決策腳本,其中包括編隊的戰術、單機的戰術、接敵和空戰的展示的等等。設計編輯決策腳本的過程,需要居于實驗設計工具來進行。
完成決策腳本后,可以進行仿真實驗的設計,這個過程是對整個任務中各類裝備的技術性能參數以及作戰效能的影響,進行運行設計。當完成運行仿真實驗的設計之后,就可以按照這個設計,將設備數據、任務確定,以及決策腳本輸入到仿真引擎中,進行實驗文件信息安排調度的仿真試驗,并得對其產生的數據信息進行采集。仿真實驗設計的過程,需要基于實驗設計工具;仿真實驗的運行工作,需要基于仿真引擎和實驗管理工具。
最后基于采集來的實驗數據,完成對仿真結果的分析以及仿真表現的分析。具體流程如圖一:
2.空戰仿真決策建模對戰斗機空戰指揮引導目標控制的功效
空戰仿真決策建模在實際應用中,能夠基于戰斗機的多種飛行情況,進行指揮引導。
基于在建模中航線的設置,戰斗機識別目標和通過隊形干擾目標的機會更大。戰斗機空戰指揮中利用建模的模擬,可更為有效的引導戰斗機隊形的變化、對目標的接近,從而達到引導戰斗機目標控制的作用。另外,在同樣的攻擊時間以及同樣的導彈射程時,空戰仿真決策建模工作能夠引導發射導彈在更為近的距離,并且完成對雷達導彈的控制工作。
二、戰斗機瞄準線穩定控制流程
(1)在戰斗機的空戰指揮中,可以利用戰斗機瞄準線的穩定控制,進行指揮的引導目標控制。戰斗機瞄準線穩定控制是利用測量出瞄準線相對參考坐標系的偏差角,并對穩定回路中對瞄準線的干擾進行補償,在此基礎上,促使被控的戰斗機瞄準線相對初始的控制位置保持穩定不變,從而確定其瞄準目標的穩定。
(2)戰斗機瞄準線的穩定控制過程是在進行標準精確的瞄準時,依據控制裝置,促使瞄準線對準目標中央。如出現載體的運動過大時,則給出一個誤差的輸出信號,并利用這個信號穩定控制平臺。這樣,平臺在繼續運動的情況下,在慣性空間內會與戰斗機運行慣性基準轉角形成一定的比例。利用這個比例,可以衡量戰斗機的運行,同時對比目標的運行,從而進行引導目標的控制。
(3)戰斗機瞄準線的穩定控制可能出現模糊控制的情況,造成對戰斗機運行及目標控制的不良影響。這種時候,可以進行瞄準線的穩定控制量的矯正,利用微陀螺慣性測量組合原理,獲取測量坐標系到轉臺瞄準坐標系之間的轉換,確定一個穩定瞄準后的矩陣,這樣就能得到一個瞄準線新的方位值和俯仰角度值,能夠幫助瞄準線進行穩定的控制。
三、預警機引導戰斗機空戰目標控制
預警機在空戰過程中,具有空中監視戰場的優勢。在編隊中,能夠起到發現目標并引導戰斗機進行超視距攻擊的作用。
1.預警機引導戰斗機目標控制的過程
預警機在引導戰斗機進行目標的追蹤和控制中,能夠通過目標和戰斗機的高度、速度和戰術位置等方面進行分析并將分析結果和對應的戰術傳達給戰斗機,從而引導戰斗機完成對目標的控制。
預警機引導戰斗機的過程,大體上可以分為兩個階段,第一個階段是在較遠距離時,對戰斗機進行向目標區域的航向引導。戰斗機在這個過程中,通過預警機的指揮系統,了解視距外的目標位置,通報應該到達的位置區域。這個階段中,由于目標位置無法反映在戰斗機機載雷達的視域內,因此,戰斗機的機載雷達可以一直處于關閉的狀態,這樣處理,有提升隱蔽性的好處。第二階段戰斗機已經到達指定目標區域后,目標位置可以顯示在機載雷達上,戰斗機直接通過機載雷達的是識別,實施對目標的追蹤和控制。
2.預警機引導戰斗機目標控制的函數構造
在預警機引導戰斗機的目標控制中,要通過相關函數,進行控制的態勢評估以及目標分配,合理的完成對戰斗機的引導。這其中,利用的函數包括單機相對攻擊優勢函數、角度攻擊優勢函數,以及能量優勢函數。
單機相對攻擊優勢函數,是描述戰斗機符合對指定目標進行控制的程度的函數計算。其反應兩方面的優勢情況,一是戰斗機對于目標的控制優勢,二是目標反向對戰斗機的控制優勢。相對攻擊優勢函數要通過測算距離、防衛和武器等方式進行確定。單機相對攻擊優勢評估模型由 角度優勢SA、距離優勢SD、速度優勢SV、高度優勢SH 組成,引入權重Wi,且 = 1 ,構造優勢函數為: 。
角度優勢函數是為了實現目標的有效跟蹤,保持與目標方位呈一定角度,所構造的函數。為避免攻擊,最好的進入角為180度。
能量優勢函數具體體現為,戰斗機的總能量為動能和勢能之和,飛機能量越高,所獲得的機動能力和攻擊能力越強。
結語:
通過空戰決策建模、戰斗機瞄準線穩定控制、預警機引導,三種空戰指揮中引導目標控制的方法研究,對于戰斗機空戰指揮引導目標控制工作,能夠有一個進一步的了解,需要我們更加深入的進行實驗驗證。在未來的空戰指揮中,能夠發揮出更大的作用。
參考文獻:
[1]高陽陽,余敏建,楊杰.戰斗機空戰指揮引導目標準確控制研究[J].計算機仿真,2018,35(11):28-32.
[2]高陽陽,余敏建,楊杰.多機空戰指揮引導優勢量化評估模型研究[J].航空計算技術,2018,48(04):33-36+45.
[3]劉金星.空戰指揮控制的自主決策思維屬性[J].電光與控制,2010,17(06):1-4.
作者簡介:范宣杰(1997.3-),男(漢族),浙江臺州市人,學員,本科在讀,主要研究領域為地面領航。
