基于PLC的碼垛機器人設計
2019-10-21 10:11:56趙凡鄭賢滿章馨云周小樂
科技風 2019年8期
趙凡 鄭賢滿 章馨云 周小樂
摘?要:根據對現有物流碼垛機器人市場的分析,當前大多數工廠包裝還使用人工,人力資源成本逐步增高致使成本提高,且生產效率低下。為了最大程度減少生產的成本,提高生產效率,提出了碼垛包裝機器人普及的方案,以利用PLC可編程程序機械取料手為主結合,對所需要打包物體進行碼垛搬運、打包。通過測量系統和PLC可編程控制系統來達到碼垛搬運的目的。在中國現有包裝工廠中此類機器人普及率不高,可施性及強,有著很大的市場前景。
關鍵詞:PLC;碼垛;機器人
隨著科技的進步,工業機器人領域快速發展,使得人類可以從單一重復的工作中解脫。中國小型機器人的銷量遠遠超過歐美各大國家,但是工廠的自動化水平并沒有歐美大國的高,根據調查,中國工業機器人的銷量居于全球首位。2010年起中國工業機器人需求量急增,2013年起中國工業機器人需求量開始超越日本,2014年起中國工業機器人需求量超過歐洲,至2016年中國的工業機器人全面銷量已占全球總銷量的30%,即便如此,我國工業機器人的保有量和密度依舊低于其他的世界主要市場。因此碼垛機器人能否被普及應用將是中國工業機器人行業發展的又一次小進步。機器人行業的發展也是綜合國力發展的一種體現,中華名族偉大復興的中國夢和人類社會的進步需要我們更大力度的去發展工業機器人行業的普及應用。
碼垛機器人有著結構簡單、零部件少,占地面積小、適性強的特點,因而成本低,價格實惠,可操作性強。而當今世界物流行業發展迅速,碼垛物流機器人也是十分受到世界各地工廠的青睞,中國需要發展普及碼垛機器人。
1 方案設計
設計的機器人主要用于化妝品、藥品、食品包裝,實現自動化包裝。要達到此目的,有兩種實現方案:第一:利用可編程控制程序,輸入抓取物體的3維固態圖,再驅動關節,再機械手統一抓取物體,進行搬運,進行打包。第二:帶紅外檢測模式,挨個分析抓取物體的3維動態圖,統一抓取檢測物體,再驅動關節,再由機械手統一抓取物體,進行搬運,進行打包。比較上述兩種方案,方案二精度較高,方案一構成簡單,實現方便,只需要把物體固態圖傳輸成功,就可以實現識別。因此最終選用第一方案。
按照方案一的設想,并與工廠流水線工作相配合,設計了一種基于PLC的固定式多關節機器人。該機器人的結構簡單,造價低廉、負載能力強、可編程度高,適應不同工位上的硬紙盒、塑料盒等盒狀物的搬運碼垛。本研究設計不僅限用于拆垛、碼垛,還可以用于物料的分揀、搬運等領域,市場的運用前景廣泛。
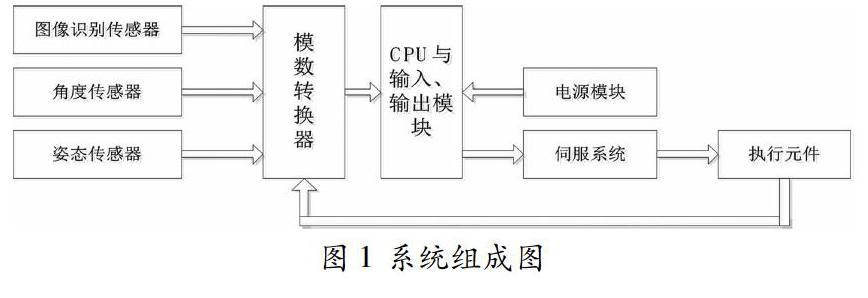
具體系統組成如圖1所示。PLC做為主控單元,外圍測量元件圖像識別傳感器、角度傳感器和姿態傳感器進行信息采集,通過模數轉換器將信息通過輸入模塊傳遞給CPU,CPU對此進行判斷分析,并發出指令傳遞給輸出模塊,輸出模塊將信息傳遞給伺服系統,伺服系統來控制執行元件機械手完成相應的動作指令,并將執行元件的輸出信號反饋到模數轉換器中進行數據的整合轉換。
2 硬件控制系統的設計
基于碼垛機器人的工作環境多處于環境較為惡劣的流水線加工廠,就要要求機器人的硬件控制系統具有很高的可靠性,才能確保生產的穩定運行。所以機器人的系統設計采用模塊化的形式,控制系統的核心控制邏輯通過PLC來實現的,為了能對該系統進行比較全面和可靠的自動控制,保證控制系統的靈活性、可靠性和易維護性等因素,機器人各個電氣元件采用我們較為熟悉的三菱FX-2N系列的PLC進行控制。
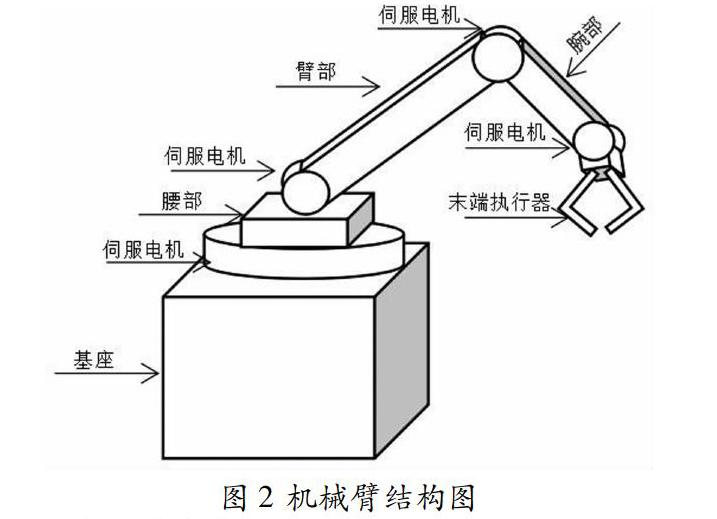
碼垛機器人采用的是固定式多關節機器人,如圖2所示,機器人機身固定在地面基礎上,腰部與基座之間用一臺伺服電動機相連,控制機器人機身在x﹑y平面內的轉動,機器人所有的連桿都用伺服電動機組合而成,因而都可以旋轉。而腰部可自由轉動,因而整個組合件可在與基座平行的平面內移動角度,這種設計的優點主要是機械臂具有較強的靈活性和較大的工作區域,可以在機器人基座附近的地方工作,并越過其工作范圍內的人和障礙物。
2.1 腰部底座關節機械結構
腰部底座的運動是由底部的伺服電機來控制空心軸,進而使整體基座實現腰部旋轉,并且底部基座及腰部的法蘭連接結構設計可以降低機械關節動時的工作噪音,同時也節約了機械臂外部的設計空間,在設計生產中被搬運的物品只需要從一個位置移到另個位置上,繞垂直于水平方向的軸旋轉以調整放置方向。
2.2 臂部腕部關節結構
臂部與腕部的運動由傳動機構來實現,因此,它不僅僅承受被抓取工件的重量,而且承受末端執行器、手腕和手臂自身的重量。為保證機械手的剛度、減輕機械手的整體重量、提高機械臂抓重大小和定位精度,臂部與腕部都采用空心軸的單臂式的結構形式,兩機械結構之間采用伺服電機的齒合式連接。
2.3 末端執行器結構
末端執行器采用齒形平面指夾鉗式取料手,該結構為了能夠完成碼垛過程中夾緊盒狀物,而采用平動式手爪能更好的在小空間的內完成碼垛指令。
3 軟件控制系統的設計
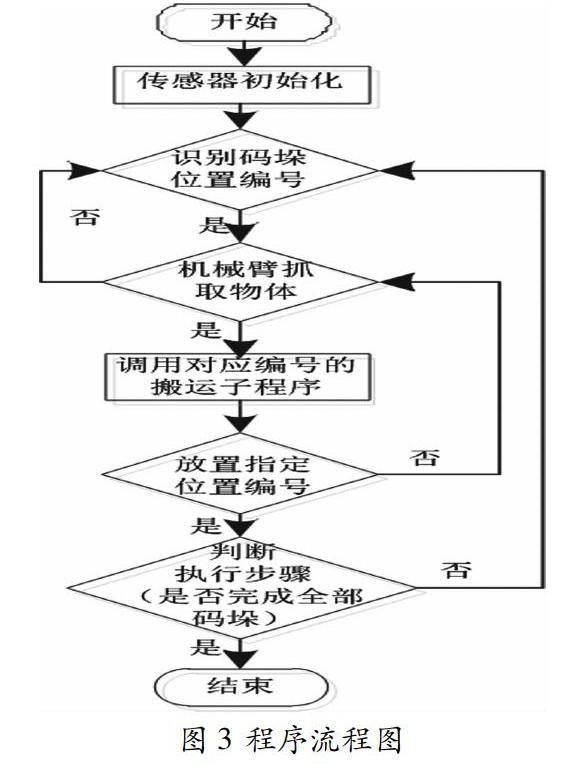
軟件設計基于模塊化設計思想,其中主程序流程圖如圖3所示。根據所放置的位置對所需包裝盒進行編號,共分為8個位置。每個位置具有固定的程序即圖中對應編號的搬運子程序。通過圖像識別傳感器對包裝盒的編碼進行掃描識別,CPU對識別的圖像數據進行分析處理,驅動伺服電機動作機械臂對物體實行定位抓取,同時調用搬運的子程序將抓取物體置于指定的編號位置,重復調用全部子程序的指令步驟,子程序包含將包裝盒搬運到指定位置所需的指令,從而實現對物體的全部碼垛。
經過上機運行,可實現對所需打包物體掃描識別,抓取進行碼垛搬運至指定位置,再進行打包,完成工作。
4 總結
該款碼垛包裝機器人在上調試能夠實現完整的工作流程,經過仿真,系統可以實現對所需要打包物體進行紅外線掃描圖像識別、利用plc可編程程序操作抓取式機械手進行碼垛搬運、打包。并且該款碼垛機器人軟件和硬件系統便于使用者操作。該款碼垛包裝機器人結構簡單,運作靈活、精準度高,作業效率高,且造價低廉、負載能力強、可編程度高,利于市場普及應用,利于現代生產提供了更高的生產效率。此碼垛系統將具有更加廣泛的市場前景和發展潛力。
參考文獻:
[1]程永強.基于PLC和伺服的砌塊碼垛機控制系統設計[J].通化師范學院學報,2018,39(12):1-5.
[2]李成偉,朱秀麗,贠超.碼垛機器人機構設計與控制系統研究[J].機電工程,2008,25(12):81-84+99.
[3]南博.基于PLC的氣動機械手控制系統設計[J].內燃機與配件,2018(19):100-102.
[4]秦萍.基于S7-300 PLC的機械手自動搬運系統控制研究[J].內燃機與配件,2018(21):188-191.
[5]秦治偉,季明明,巢淵,李尚榮.基于PLC的取放料機械手控制系統設計[J].南方農機,2018,49(22):18-19.