基于神經網絡的蓄熱式加熱爐的溫度控制研究
2019-10-21 12:45:35周建新熊延輝
科技風 2019年8期
周建新 熊延輝


摘?要:文中提出了一種基于BP神經元網絡控制PID的復合方法,通過線下學習并對控制對象模型進行分類辨識,這樣就形成了相似與人類大腦的辨識器(NNI),并通過改正其網絡結構權值,讓它自己逐漸地調整,使符合控制系統對象的特性。把它用在蓄熱式加熱爐的自動化溫度控制里,通過matlab仿真有著很好的效果。
關鍵詞:蓄熱式加熱爐;BP神經網絡;溫度控制
鋼鐵企業也隨著社會的發展。對加熱爐加熱效果,爐溫控制更加嚴格,但是以前傳常規的PID調節控制爐溫,在大滯后,強耦合的條件下完成的不是很理想,根據實際的現狀,設計了一種通過神經網絡的學習訓練,識別出學習結果,它的輸出控制PID參數的方法,通過神經網絡學習訓練,控制三個PID的參數,根據實時狀態去變化參數,使系統達到穩定。引進了神經網絡算法,它的輸出控制PID.通過matlab對溫度控制系統進行仿真工作。[3]
1 神經網絡優點
神經網絡的優點如下:非線性較強。在神經網絡中只要有大量的神經元,就能用三層神經元結構來近似的展現出任意的一種非線性連續函數。
2 BP網絡的前饋計算
在神經網絡學習的時候,它要訓練樣本,假如總共有N個采樣的數據來培訓,第一在許多的樣本中選擇里面的一個,它的的輸入模式?XP?、輸出模式{?dpk?}來培訓神經網絡。為了寫公式的時候工整,省略樣本的p,所以下面將隱含層中的第?j?個節點寫為:
netpj=netj=∑Mi=1wijoi?(1)
第j個節點輸出為:
oj=fnetj?(2)
其中?fnetj?為激活函數:
fnetj=11+e(netj-θj)θ0?(3)
其中?θj?代表著偏移值或者閾值,正數的?θj?的功能是讓?fnetj?函數右移平行于y軸,?θ0?的功能是改變?δ?函數的曲線圖型,特別小的?θ0?讓?δ?函數近似于階躍函數,特別大?θ0?的作用是讓函數?δ?變化的比之前平穩,取為2.067,為1.371對式(3)求導,可得:
f'netj=fnetj1-f(netj)?(4)
第j個神經元的的輸出?o?j?即要經過加權系數?w?jk?往前傳遞到第k個神經元的總共輸入為:
netk=∑qj=1w?jko?j?(5)
其中q為隱含層的節點數。輸出層中的神經元是第k個節點,它的真實神經網絡輸出為:
O?k=fnetk?(6)
3 仿真實驗
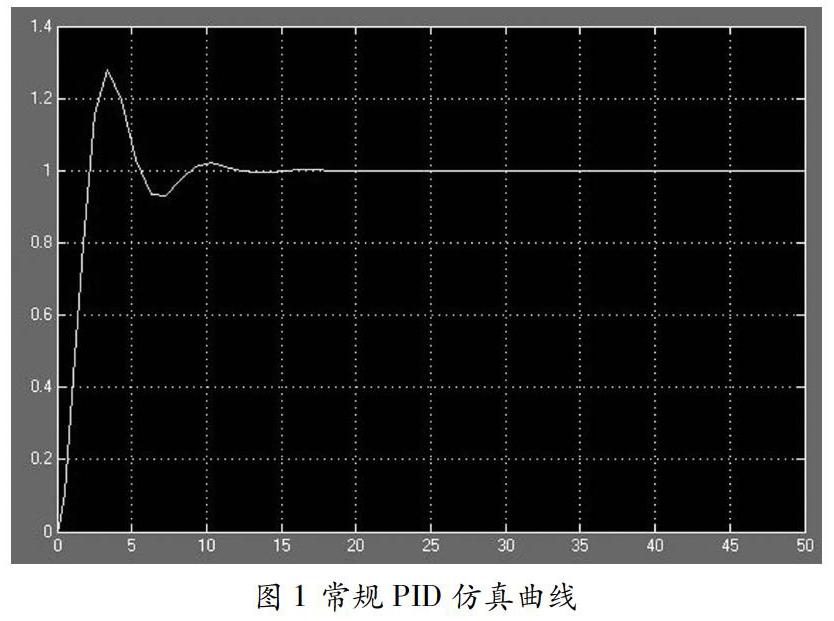
本實驗采用matlab對控制對象進行仿真,在常規控制器的基礎上,加入一個神經網絡控制器,構成如圖一所示的神經網絡控制器。通過仿真得出兩個曲線。如圖1、圖2所示。
4 結論
通過對比上述兩個曲線得出常規的PID需要調節的時間較長,響應時間太長,達到了15秒以后才趨于穩定,而神經網絡的PID控制在5秒就趨于穩定,調節時間縮短了3倍,結果與期望相符。
參考文獻:
[1]趙望達,劉勇求,賀毅.一種用RBF神經網絡改善傳感器測量精度的新方法[J].電子技術應用,2004(11).
[2]何繼愛,黃智武,田亞菲.一種單神經元PID控制器[J].甘肅科學學報,2004(04).
[3]吳學文,吳黎明,張力鍇,陳泰偉.遺傳神經網絡在車身姿態測量中的應用[J].自動化與信息工程,2012(01).