基于6-SPU并聯(lián)機構(gòu)的鉚孔機器人靜力學分析
2019-10-21 23:09:56梁諍許勇呂葉萍
鄭州輕工業(yè)學院學報(社會科學版) 2019年4期
關(guān)鍵詞:變形
梁諍 許勇 呂葉萍
摘要:對基于6|SPU六自由度并聯(lián)機構(gòu)的集制孔與鉚接為一體的新型步行式鉚孔機器人進行靜力學分析:在位置逆解建模、求解的基礎(chǔ)上,根據(jù)機器人鉚接軌跡規(guī)劃,確定鉚槍的正確鉚孔作業(yè)位姿;針對飛機某大型薄壁圓柱面工件,應(yīng)用有限元分析軟件進行機器人鉚孔作業(yè)仿真,獲得各鉚接點工位對應(yīng)的動平臺各向最大變形量及機構(gòu)的最大等效應(yīng)力.仿真結(jié)果表明,機器人最大變形量最大值為51.847×10-7m,在飛機鉚接制孔誤差允許范圍內(nèi),且機構(gòu)最大等效應(yīng)力最大值為2.698 MPa,遠小于材料屈服極限,可滿足鉚孔作業(yè)的精度與強度需求.
Abstract:A new walking riveting robot integrating hole making and riveting based on 6|SPU six degrees of freedom parallel mechanism was analyzed statically.On the basis of inverse position modeling and solution, the correct position of riveting hole of riveting gun was determined according to robot riveting trajectory planning.For aircraft large thin|walled cylindrical workpiece, the finite element analysis software was used to simulate the robot riveting operation,and the maximum deformation of the moving platform and the maximum equivalent stress of the mechanism were obtained. The simulation results showed that the maximum deformation of the robotwas 51.847×10-7m, which was within the allowable error range of aircraft riveting hole making, and the maximum equivalent stress of the mechanism was 2.698 MPa, which was far less than the material yield limit, which could meet the requirements of precision and strength of riveting hole operation.
關(guān)鍵詞:鉚孔機器人;軌跡規(guī)劃;靜力學分析;變形
Key words:riveting robot;trajectory planning;static analysis;deformation
中圖分類號:TH122文獻標識碼:ADOI:10.3969/j.issn.2096-1553.2019.04.014
文章編號:2096-1553(2019)04-0096-06
0 引言
大型復雜飛機外形薄壁壁板在航空、汽車等工業(yè)制造中有著重要作用,但是大型薄壁零件通常存在變形的困擾,特別是在加工后所產(chǎn)生的翹曲變形是不可忽視的技術(shù)難題.由不同的原因引起的大型曲面薄壁零件變形包括彈性變形、塑性變形、熱變形和殘余應(yīng)力變形,其中殘余應(yīng)力為零件變形的主要原因.傳統(tǒng)工藝方法已經(jīng)無法滿足航空航天、汽車制造等高端制造業(yè)對大型薄壁復雜曲面工件的精密、高效、柔性加工等高端需求,因此,自動化鉚接機器人正日益成為智能制造的主流裝備.剛度是滿足機器人作業(yè)單元的重要性能指標,它隨機器人的位姿而變化[1],因此需在機構(gòu)設(shè)計階段快速預估出機構(gòu)剛度是否滿足作業(yè)要求,以便為機械結(jié)構(gòu)的詳細設(shè)計提供必要的理論依據(jù).
機構(gòu)剛度對機構(gòu)末端的位姿精度非常重要,是影響機器人定位精度的重要因素.竇永磊等[2]計入所有支鏈構(gòu)件和關(guān)節(jié)的彈性,基于全變形雅可比矩陣,構(gòu)造出多種混聯(lián)機器人的半解析剛度模型,通過算例揭示了整機剛度在任務(wù)空間中隨位形的變化規(guī)律.W.A.Cao等[3]提出了對過約束SCARA運動并聯(lián)機構(gòu)進行剛度建模的一種通用方法.張東勝等[4]針對基于2RPU/UPR機構(gòu)的五自由度混聯(lián)機器人,分別求解了并聯(lián)、串聯(lián)部分的靜剛度模型,從構(gòu)造系統(tǒng)的力旋量系和彈性變形協(xié)調(diào)條件入手,簡單且快速地建立了混聯(lián)機器人的整體剛度模型,并求解了整機靜剛度在任務(wù)空間中隨位形變化的分布圖.張俊等[5]分別采用虛擬關(guān)節(jié)法和有限元法,計入Exechon并聯(lián)模塊各關(guān)節(jié)和支鏈體的柔性,通過推導動平臺和支鏈裝配體間的變形協(xié)調(diào)方程,構(gòu)建出系統(tǒng)的彈性靜力學模型,由系統(tǒng)方程抽取出動平臺剛度矩陣,據(jù)此預估了Exechon并聯(lián)模塊在典型位姿和工作全域內(nèi)的剛度性能.
上述各種剛度建模方法都較為復雜,且影響機構(gòu)剛度的因素較多,難以考慮全面.王南等[6]利用有限元分析方法研究了兩種3-RPS并聯(lián)機構(gòu)的變形情況,并將結(jié)果與考慮約束反力所構(gòu)造的剛度模型計算結(jié)果相互驗證,但所建立的有限元模型未考慮不同運動副間算法的區(qū)別.
李育文等[7]采用有限元方法基于ANSYS建立了6|UPS機床的有限元模型,分析了其工作空間內(nèi)的剛度分布,并驗證了其有限元模型的合理性,但未考慮機構(gòu)處于不同位姿時的剛度變化.
筆者所在研究團隊提出了一種基于6|SPU(S表示球面副、P表示移動驅(qū)動副、U表示萬向鉸)六自由度并聯(lián)機構(gòu)的集制孔與鉚接為一體的可移動式機器人,團隊成員劉文彩等[8]分析了機構(gòu)的運動學性能.在此基礎(chǔ)上,本文擬基于位置逆解進行鉚槍軌跡規(guī)劃,采用有限元分析的方法,在考慮機構(gòu)不同位姿及各運動副算法的基礎(chǔ)上,對機構(gòu)剛度(即變形、應(yīng)力應(yīng)變)進行靜力學分析,以期為6|SPU并聯(lián)機構(gòu)的優(yōu)化設(shè)計提供理論依據(jù).
1 基于位置逆解的鉚槍軌跡規(guī)劃
1.1 機器人構(gòu)型
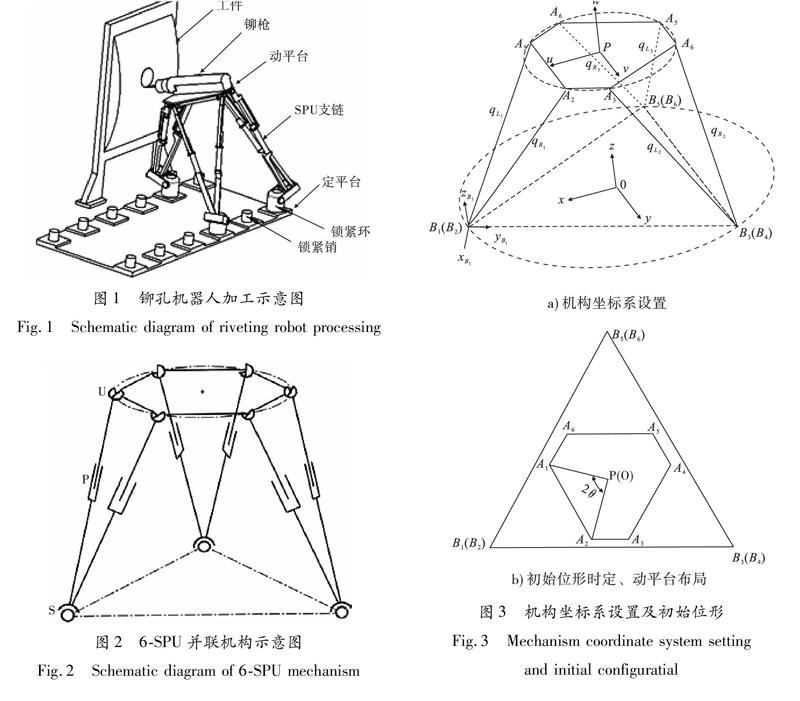
針對傳統(tǒng)工藝協(xié)調(diào)復雜、流程冗長、加工范圍受限等問題,設(shè)計了一種基于6|SPU并聯(lián)機構(gòu)的鉚孔機器人,其加工示意圖見圖1.該機器人足端鎖緊環(huán)可與定平臺上的鎖緊銷可靠嵌入、脫離,實現(xiàn)擺腿/落腿運動,機器人行至目的工位時,動平臺調(diào)姿,各足支撐于定平臺,固結(jié)于動平臺的鉚槍執(zhí)行加工任務(wù).
本文提出的3閉環(huán)支鏈6|SPU并聯(lián)機構(gòu)如圖2所示,每條支鏈(步行腿)均為一個含復合球面副S的2|SPU兩自由度并聯(lián)機構(gòu),可實現(xiàn)沿某一鎖緊銷隊列的直線步行,且保持落足姿態(tài)恒與定平臺垂直.
1.2 位置逆解
機構(gòu)坐標系設(shè)置及初始位形如圖3所示.建立定平臺坐標系{O-xyz}:坐標系原點O為等邊三角形定平臺的形心,x軸正方向由O指向復合球面副形心B1(B2),z軸正方向垂直定平臺向上,y軸正方向由右手法則確定.建立動平臺坐標系{P-uvw}:坐標系原點P為六邊形動平臺的形心,u軸正方向由P指向動平臺上兩萬向鉸形心A1和A2的連線中點,w軸正方向垂直動平臺向上,v軸正方向由右手法則確定.以支鏈一為例說明建立支鏈坐標系{Bi-xBiyBizBi}(i=1,2,…,6,下同)的方法:坐標系原點取B1,yB1軸正方向由B1指向B3,zB1軸正方向垂直于B1B3B5所在平面且向外,xB1軸正方向由右手法則確定.
記定平臺外接圓和動平臺外接圓半徑分別為rO和rP,動平臺長邊所對圓心角為2θ.機構(gòu)初始位形為動平臺、定平臺平行,且動坐標系、定坐標系各坐標軸分別平行.
1.3 鉚槍軌跡規(guī)劃
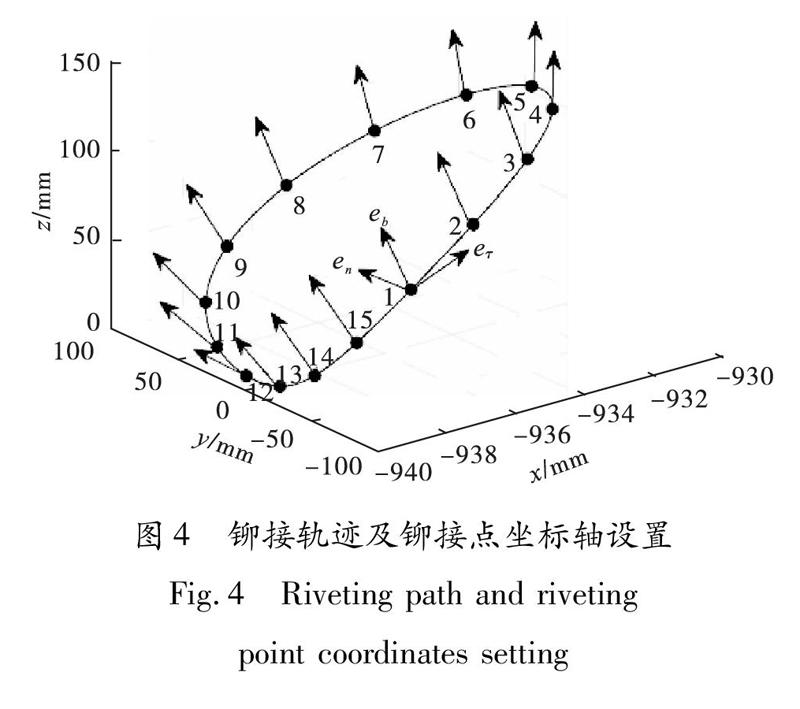
本文以飛機某大型薄壁圓柱面工件表面鉚接制孔為例,多個鉚接孔形成的空間曲線即為鉚槍末端軌跡.
基于微分幾何曲線論中的弗萊納-雪列矢量[9],可建立鉚接點坐標系.運用Matlab軟件計算出軌跡各點處的單位切向量τ,單位法向量n和單位次法向量b.為保證鉚接制孔的加工精度,鉚接作業(yè)時鉚槍的前進方向必須與工件表面鉚接點坐標系的τ方向一致,鉚槍主軸方向必須與鉚接點坐標系的b方向一致.鉚接軌跡及鉚接點處坐標軸設(shè)置如圖4所示,各鉚接點位置坐標及對應(yīng)的鉚槍主軸姿態(tài)角見表1.
2 6|SPU并聯(lián)機構(gòu)靜力學分析
2.1 有限元分析前處理
并聯(lián)機構(gòu)的剛度模型是位形的函數(shù),在應(yīng)
用有限元軟件對并聯(lián)機構(gòu)分析時,應(yīng)針對不同位形對并聯(lián)機構(gòu)進行有限元分析[10].利用Solidworks軟件建立機構(gòu)的實體模型,將并聯(lián)機構(gòu)按照實際情況裝配到一起.由表1通過位置逆解算得并聯(lián)機構(gòu)的位姿參數(shù),將并聯(lián)機構(gòu)調(diào)整到需要的位姿并導入到Ansys Workbench中,在建模的過程中沒有采用加權(quán)的方法.6|SPU并聯(lián)機構(gòu)在導入有限元分析軟件之后,需根據(jù)運動副連接條件對每個零件設(shè)定接觸約束,其中固定處采用bonded連接和MPC算法,移動副和轉(zhuǎn)動副處采用No separation連接和Pure penalty算法,接觸設(shè)定完成后,對裝配體在定平臺底面設(shè)定的約束為Fixed Support.每種并聯(lián)機構(gòu)的材料設(shè)定為structural steel,彈性模量E=200 GPa,密度為7850 kg·m-3,泊松比γ=0.3,屈服極限δ= 350 MPa.機器人整體模型采用四面體單元劃分網(wǎng)格(見圖5),不考慮應(yīng)力走向,單元數(shù)目為27 968,節(jié)點數(shù)為80 397.設(shè)鉚槍進行鉚孔作業(yè)時承受沿鉚槍軸線的軸向工作載荷F=110 N.
2.2 靜力學分析
靜力學分析可以全面、直觀地評價機構(gòu)的變形與應(yīng)力分布情況[11].對機構(gòu)進行靜力學分析,其結(jié)果如圖6和圖7所示.
由圖6可以看出,機構(gòu)動平臺在x,y,z方向最大變形量最大值分別為5.092×10-7m,27.586×10-7m和51.847×10-7m.機構(gòu)平臺在z方向最大變形量最大,說明機構(gòu)在z方向的剛度低于其他兩個方向,即在z方向承載能力較差;機構(gòu)動平臺在x方向的最大變形量最小,說明機構(gòu)在x方向的剛度最好,即在x方向承載能力強于其他兩個方向.通過查閱相關(guān)文獻可知,飛機鉚接制孔誤差一般應(yīng)控制在2×10-5m以內(nèi)[8],機構(gòu)整體在x,y,z方向的最大變形量均小于該值,滿足鉚接加工的精度要求.
由圖7可以看出,機構(gòu)的最大等效應(yīng)力最大值為2.698 MPa,遠小于材料的屈服極限,能夠滿足鉚接加工所需的強度要求.
分析過程中,機構(gòu)在工作狀態(tài)中產(chǎn)生的變形與等效應(yīng)力較大的區(qū)域主要分布在動平臺和驅(qū)動桿上,其他零件處的變形和應(yīng)力均較小.
3 結(jié)語
針對高端制造業(yè)對大型薄壁復雜曲面工件的精密、高效、柔性加工需求,本文對基于6|SPU并聯(lián)機構(gòu)的新型步行式鉚孔機器人進行了靜力學分析.基于建模、求解機構(gòu)位置逆解,完成了機器人鉚接軌跡規(guī)劃,確定了鉚槍末端的精確軌跡和正確的鉚孔作業(yè)姿態(tài);以SolidWorks為平臺對6|SPU并聯(lián)機構(gòu)進行三維建模,并運用有限元分析軟件ANSYS中的Workbench模塊對此機構(gòu)的剛度進行靜力學分析.結(jié)果表明:機器人最大變形量最大值為51.847×10-7m,在飛機鉚接制孔誤差允許范圍內(nèi);機構(gòu)最大等效應(yīng)力最大值為2.698 MPa,遠小于材料屈服極限.
該結(jié)果有力證明了本文提出的機構(gòu)構(gòu)型、位置逆解和軌跡規(guī)劃模型的合理性,有限元分析結(jié)果也表明機構(gòu)滿足鉚接加工精度與強度要求.該成果為自動鉚接機器人的結(jié)構(gòu)優(yōu)化和性能分析提供了必要的理論依據(jù).
根據(jù)文中靜力學的分析結(jié)果,對自動鉚接機器人變形和應(yīng)力較大區(qū)域的零部件進行進一步的結(jié)構(gòu)和尺寸優(yōu)化,以提高自動鉚接機器人的整體性能,將是下一步的工作重點.
參考文獻:
[1] 汪滿新,王攀峰,宋軼民,等.4自由度混聯(lián)機器人靜剛度分析[J].機械工程學報,2011,47(15):9.
[2] 竇永磊,汪滿新,王攀峰,等.一種6自由度混聯(lián)機器人靜剛度分析[J].機械工程學報,2015,51(7):38.
[3] CAO W A,YANG D H,DING H F.A method for stiffness analysis of overconstrained parallel roboticmechanisms with Scara motion[J].Roboticsand Computer|integrated Manufacturing,2018(49):426.
[4] 張東勝,許允斗,姚建濤,等.2RPU/UPR+RP五自由度混聯(lián)機器人靜剛度分析[J].中國機械工程,2018,29(6):712.
[5] 張俊,趙艷芹.Exechon并聯(lián)模塊的靜剛度建模與分析[J].機械工程學報,2016,52(19):34.
[6] 王南,高鵬,崔國華,等.兩種并聯(lián)機構(gòu)的靜剛度及有限元分析[J].河北工程大學學報(自然科學版),2013,30(1):87.
[7] 李育文,張華,楊建新,等.6|UPS并聯(lián)機床靜剛度的有限元分析和實驗研究[J].中國機械工程,2004(2):20.
[8] 劉文彩,許勇,陳佳麗,等.基于6|SPU并聯(lián)機構(gòu)的飛機壁板鉚接機器人逆運動學分析[J].機械設(shè)計與研究,2018,34(2):76.
[9] 應(yīng)燦.焊接機器人工作站協(xié)同運動的軌跡優(yōu)化研究[D].廣州:華南理工大學,2013.
[10]王友漁,黃田,CHETWYND D,等.Tricept機械手靜剛度解析建模方法[J].機械工程學報,2008(8):13.
[11]張軍,何芳.基于ANSYS一種轉(zhuǎn)運小車關(guān)鍵件有限元分析[J].裝備制造工藝,2016(10):15.
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
