向光太陽能控制系統設計
2019-10-25 01:38:52張佳偉王秀玲張瀟楊
儀器儀表用戶 2019年11期
張佳偉,王秀玲,張瀟楊
(銀川能源學院 電力學院,銀川 750110)
0 引言
雖然目前國內大多數已經使用太陽能的地區都使用固定太陽能板收集和利用太陽能,而在其他地區,由于受到建設成本等眾多因素的影響只能使用單軸太陽能監測系統,但這影響太陽能的收集和利用。在需要更精確跟蹤的試驗設備中,大多數太陽能跟蹤設備仍然進口,主要原因是基本技術和設備的加工不精確。為了監測該國的太陽能和其他限制太陽能利用和效率的因素。
本設計是一種太陽能電池板自動追光系統,與固定太陽能光源收集裝置相比,在引入自動光跟蹤系統之后,安裝的裝置能夠及時調整電池板與光之間的夾角。太陽能對太陽能電池板保持垂直照明,提高了太陽能的使用效率。
1 追蹤方式的選擇
目前,用于實現追蹤太陽的方法較多,概括為兩類:視日運動軌跡跟蹤和光電傳感器追蹤兩大類。

圖1 總體設計方案Fig.1 Overall design
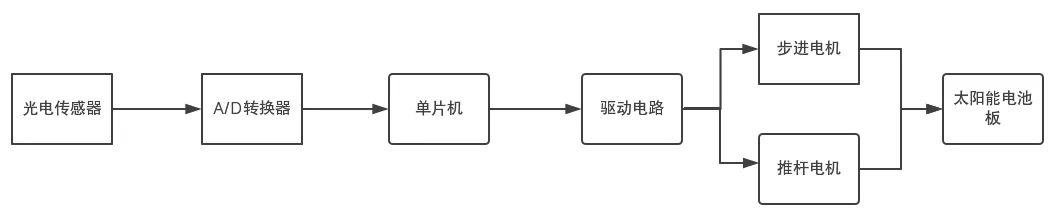
圖2 系統硬件電路框圖Fig.2 System hardware circuit block diagram
1)時日運動軌跡追蹤方式
這種追蹤方式主要根據觀察模擬太陽的運行軌跡從而進行追光算法設計和根據算法編寫程序,根據已有的追光公式,把不同的地區太陽東升西落的整個過程所經歷的線路和時間編寫進程序使太陽能電池板能夠根據程序始終讓太陽光垂直照射在電池板上以實現最大程度的發電。這種追光方式也有很多缺點:1)計算過程復雜;2)開發成本很高;3)屬于開環控制,容易產生積累誤差,且無法自動消除這一誤差。
2)光電傳感器追蹤方式
光電傳感器追光主要是通過已有的光電轉換材料進行對太陽光照強度進行感應,然后通過電信號的傳導以對太陽光照方向進行檢測。經過光敏電阻對太陽光的檢測和采集,再將電信號傳給單片機控制系統,最后通過控制系統傳給驅動電機的轉動使相應的轉向軸進行實時轉動來實現追光。這種方法的優點是跟蹤精度好、靈敏度高[1]。
經過對兩種追光方式的比較,最終選用了光電傳感器追蹤方式。
2 光電追蹤方式的方案設計
光電追蹤方式是由光敏電阻組成的光電傳感器作為主體,通過光敏電阻來獲取光照強度信息。其中,一種用于將光電傳感器捕捉到的模擬信號輸出轉換成數字信號的轉換電路,一種是通過單片機處理光強信號比較光電來確定水平或潛步電動機的旋轉方向傳感器,實現光電追蹤方式的跟蹤。
3 硬件設計
所設計系統主要包括單片機、光電傳感器、A/D 轉換、穩壓電源、步進電機控制等幾個模塊,總體設計方案如圖1 所示。設計中在電池板旁邊放上由4 個光敏電阻組成的光電檢測模塊,能使此設計的跟蹤精確度提高,使穩定性更好。
本設計選擇STM32 單片機,它是一種帶4K 字節flash存儲器的低電壓、高性能CMOS 8 位微處理器,為很多嵌入式控制系統提供了一種靈活性高且價廉的方案[2]。
穩壓電源模塊是為整個控制電路提供能源的,是保障控制電路中所有控制芯片穩定運行的前提。
太陽光強信號是一種模擬信號,必須經過A/D 轉換才能轉化成單片機控制模塊可直接運算的數字信號。本項目選用PCF8591P 作為A/D 轉換芯片,它是一個具有4 路A/D 轉換輸入1 路D/A 模擬輸出和1 個串行總線接口的A/D轉換芯片。
1)光電檢測模塊
光電傳感器是通過一定的規律性安裝在太陽能接收裝置周圍,用于收集光強度信息,轉換對應于不同光強對應的電壓值。通過A/D 轉換模塊轉換成數字信號并將其發送到單片中的基本原理該單片通過比較4 個光敏電阻不同的電壓值來確定每個方向的照明強度,從而發出相應指令來控制驅動模塊,實現光電追蹤[3]。光電傳感器是光電跟蹤系統的起點,其功能是收集關于照明強度的信息,確定照明強度獲取的準確性和穩定性,并直接影響光電追蹤方式的準確性和穩定性。選擇適合的光電傳感器是實現追蹤的最重要步驟,光電傳感器主要包括光敏電阻器、光電二極管、光電三極管等,最終選用光敏電阻當做光電感應模塊。
2)推桿電機及驅動模塊
設計的驅動選用的是推桿電機,推桿電機結構簡單且穩定能對設計的整體起到支撐作用,就大大節省了支撐結構所需要的材料使整體的重量有了減輕。
3)中央處理模塊
系統中央處理器使用單片機模塊,其主要功能是在光電跟蹤模式下接收光電檢測模塊的光強度信息,并使用光強度偏差控制步進電動機實現光電追蹤[4]。單片設備使用由時鐘模塊收集的時間信息來計算高度角和方向角,并控制步進電動機,從而跟蹤日常運動路徑。
以單片機作為整個中央處理的核心,選用的是STM32單片機由意大利SGS 微電子公司和法國Thomson 半導體公司合并而成。此單片機的功耗較低并且具有低功耗運行和低功耗睡眠兩個功能,使得處于待機狀態時的功耗更低,這更大大適應了本設計的理念。因為此設計是增大太陽光的利用,在太陽能電池板已經正對太陽時不需要一直工作而是處于待機狀態,這使得STM32 單片機更加適合,該單片機工作所需要的最低電壓只有1.8V,直接運用整體所發出來的電就可以運行。
4 軟件設計
本系統整體程序采用模塊化進程原則設計:即首先對各功能模塊的子程序進行獨立設計,獨立調試,然后對整體進行模擬測試,測試各部分模塊的關聯協調能力。這種方案便于程序的移植和修改,同時又有利于系統功能的擴展。本部分主要包含主程序設計、A/D 轉換程序設計、光敏電阻數據處理程序設計和太陽能追蹤子程序設計等[5]。
其中主程序主要是完成系統初始化后,循環檢測光照強度,對反饋回來的電壓值進行比較運算,判斷當前光照的亮度差是否達到定值,進而驅動步進電機去調整太陽能板以便正對太陽。
光敏電阻數據處理程序設計在設計中需要注意,由于硬件上的缺陷無法將外界干擾信號全部濾除,導致數據采集結果具有較大波動。因此,本系統設置了軟件濾波環節,所用的光強傳感器采用中值濾波法進行軟件濾波。其基本原理是進行幾次連續的數據采集,將所測得的數據從大到小排序。然后分別去除首尾相同數量的幾個值,只保留排在中間的數值,再對其取平均值。該法能夠有效避免采樣過程中因系統不穩定造成的跳變干擾[6]。
追光程序設計是整個軟件設計的核心,流程圖如圖3所示。

圖3 太陽追光主程序流程Fig.3 The main process of the sun chasing light
5 軟件和硬件調試
1)軟件調試
首先必須設計一般概念和原理圖、電路圖,在每個部件的設計和測試后的組裝測試開始前,要根據這些材料開發和測試每個部件。設計的控制系統包括軟件和硬件組成部分,采用平行的開發工藝,然后制造單片機電路,再使用模擬器來測試模擬邏輯準確性。利用Proteus 軟件對系統總體電路圖進行檢測分析,目的是為了驗證總體電路圖原理的正確性。
首先要計算出一個給定時間的太陽方位角與高度角,測試得出的結果和實際值的誤差較小則可以運用到實際中。
PC 機軟件的調試,這個步驟主要是看顯示屏中的數據是否與實際相對應,運行的模塊是否都在正常工作。
單片機軟件的調試,單片機的調試主要是看它能否按照指令進行控制指令的傳遞,例如推桿電機的推動角度是否按照指令使太陽能電池板調整。
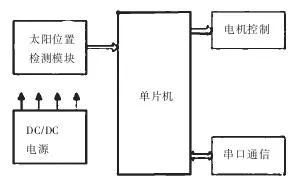
圖4 系統工作簡潔流程圖Fig.4 System work flow chart
通過對整體電路板進行模擬分析,通過計算單片中太陽的高度角和定向角來確定整體電路板原理的準確性,如果調試結果表明各部分均能達到預期效果,則本次的實驗表明太陽能電池板自動追光系統在理論上大大提高了太陽能的利用率,使得接下來的設計工作能繼續進行。經過軟件調試最終測得設計可以按照程序流程進行,各部分都可以根據信號指令做出正常判斷和動作。
2)硬件調試
首先,檢查電源連接是否正確,是否有短路,特別是如果電源連接是反向的可能會導致芯片燒壞,并且檢查焊接是否錯誤,然后檢查元器件的安裝情況。首先用萬用表檢查各個元器件之間的連接是否有短路斷路的情況,經過檢查和修補,這些都正常。接著檢查元件是否良好,用萬用表測電阻、電容的好壞,所有檢測都沒問題后就可以進行電路板組裝方面的工作了。
電路板焊接完成后,繼續進行檢測工作,檢查各個部分能不能正常工作,能否接受和處理光敏電阻對于太陽光感應后傳來的電信號并通過單片機傳給驅動部分,讓推桿電機推動太陽能電池板按照預設好的角度旋轉到對應的角度進行太陽光跟蹤操作,即檢查光敏電阻、單片機信號處理和傳遞部分、傾角傳感器、電壓電流檢測模塊是否能夠正常工作。經過這一系列的檢查檢測步驟,最終確定本設計太陽能自動追光系統能夠讓太陽能利用率得到加強。
6 結論
本文經過對太陽能電池板自動追光系統的研究,設計向光太陽能控制系統,該系統以STM32 單片機為控制核心,通過模擬陰晴天對本設計測試,然后用時日運動軌跡追蹤與光電追蹤結合的方式進行互補,整體提高了太陽能追光系統的運行穩定性,并讓系統能比較準確地對太陽光進行追蹤。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
海峽科技與產業(2016年3期)2016-05-17 04:32:12
