基于單鏡頭無人機傾斜攝影的建筑物三維模型構(gòu)建
2019-10-25 03:58:38曹爽,馬劍,馬文
桂林理工大學(xué)學(xué)報 2019年3期
關(guān)鍵詞:模型
曹 爽, 馬 劍, 馬 文
(1.南京信息工程大學(xué) 遙感與測繪工程學(xué)院,南京 210044;2.廣東南方數(shù)碼科技股份有限公司北方總部銀川分部生產(chǎn)實施部,銀川 750002)
傾斜攝影測量技術(shù)的出現(xiàn),帶動了三維建模技術(shù)及其應(yīng)用的快速發(fā)展。傾斜攝影相機是多個攝影鏡頭的組合體,鏡頭間的角度、距離必須經(jīng)過嚴格的控制,因而制作成本較高,又因其大多都安裝在大型無人機上,而大型無人機飛行有諸多限制,對于小區(qū)域的影像數(shù)據(jù)獲取并不適用。為滿足數(shù)字城市快速發(fā)展所需的高效、精確的建筑物三維地理信息需求,利用單鏡頭無人機對建筑物進行多角度拍攝,快速建立建筑物三維實景模型已成為解決這一問題的重要途徑之一[1]。
無人機傾斜攝影測量技術(shù)已經(jīng)取得了很大的發(fā)展, 其應(yīng)用價值也在各行各業(yè)中有所體現(xiàn)[2]。 許多學(xué)者從多個角度進行了研究與探討:曲林等[3]比較多種傾斜攝影方案, 利用無人機自制鏡頭獲取傾斜攝影數(shù)據(jù)建立三維模型, 得到了良好的視覺效果; 李翔等[4]通過對獲取傾斜攝影數(shù)據(jù)的幾種方法比較, 提出一種采用消費級無人機進行航空傾斜攝影數(shù)據(jù)采集的方法, 并通過實驗驗證了該方法的可行性; 曹琳[5]也利用多旋翼單鏡頭無人機進行了傾斜攝影測量研究, 并總結(jié)了無人機傾斜攝影測量獲取傾斜影像的特點及內(nèi)業(yè)數(shù)據(jù)處理的關(guān)鍵技術(shù); Bertram等[6]從建筑物3D建模的角度分析了無人機航攝相較于有人機的成本、 效率優(yōu)勢;陳大凱等[7]嘗試將常規(guī)的多旋翼單鏡頭無人機應(yīng)用于傾斜攝影, 提出了一種采用消費級無人機進行航空傾斜攝影數(shù)據(jù)采集的方法。
本文基于消費級的大疆單鏡頭無人機,采用折線型航線影像采集方法和環(huán)繞型航線影像采集方法進行建筑物三維模型構(gòu)建,利用Context Capture 三維建模軟件建立建筑物三維實景模型,最后從平面精度、高度精度及線段長度精度三方面對模型進行分析比較,得出不同航攝方案所構(gòu)建的模型的優(yōu)越性。
1 單鏡頭無人機傾斜影像獲取方法
傳統(tǒng)的傾斜攝影測量都是基于多鏡頭傾斜相機獲取影像,但是隨著新的飛行平臺、高畫質(zhì)相機、飛控App以及街景工廠、Context Capture等內(nèi)業(yè)處理軟件的出現(xiàn),傾斜影像的采集方式不再單一。單鏡頭相機和云臺三軸配合,視角靈活,能夠?qū)崿F(xiàn)無死角拍攝,而多鏡頭相機結(jié)構(gòu)相對固定,航拍時無法調(diào)整傾斜相機的傾斜角度;在航線規(guī)劃方面,單鏡頭無人機傾斜攝影仍然沿用傳統(tǒng)傾斜攝影的平行直線航線,但是根據(jù)不同的地物,不同的航攝要求,所采用的航線方案也不同,并且單鏡頭無人機還具有價格優(yōu)勢。本文利用單鏡頭無人機采用折線型航線影像采集方法和環(huán)繞型航線影像采集方法對某高校圖書館進行傾斜攝影,獲取其傾斜影像數(shù)據(jù)。
1.1 折線型航線影像采集方法
折線型航線影像采集方法是指無人機在航拍過程中的飛行軌跡是折線型的,即無人機在飛行過程中相機拍攝時的瞬時位置連接而成的直線航行軌跡,因而折線型航線又稱作路徑點任務(wù)航線,它可以被看作是一系列路徑點依次連接而成,無人機在所有路徑點處短時間懸停進行拍攝或者邊飛邊拍攝,如圖1所示。折線型航線是一種常用的飛行方案,適用于豎直和傾斜攝影。
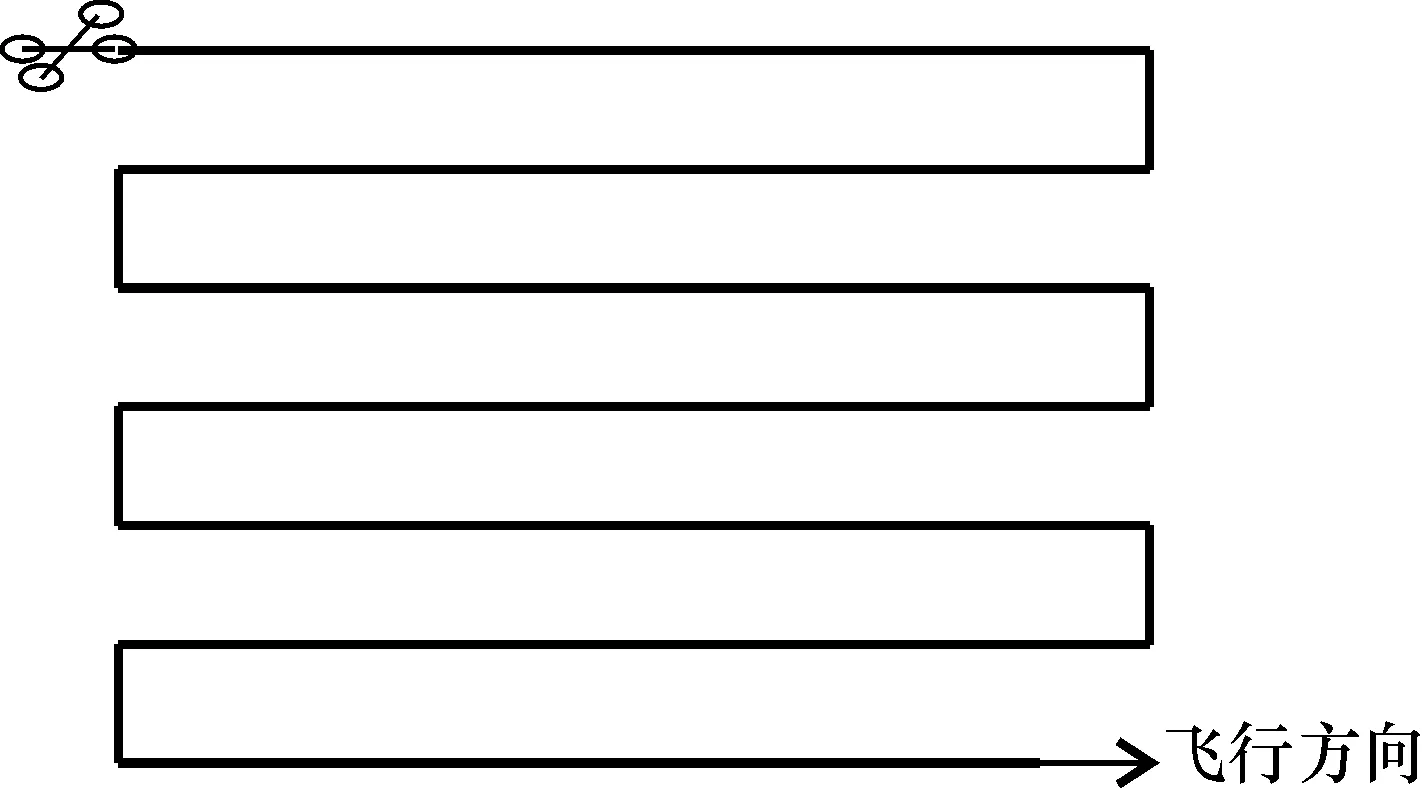
圖1 折線型航線示意圖Fig.1 Schematic diagram of folded lines
傳統(tǒng)的傾斜影像獲取方法由于在飛行平臺上攜帶了專業(yè)的多向傾斜攝影鏡頭,針對大范圍區(qū)域傾斜攝影測量,該方法是最適用的,不僅能同時獲得豎直方向和傾斜方向的影像,而且很大程度地縮短了工期,為后期數(shù)據(jù)處理提供時間保障。由于本次實驗區(qū)域較小,采用單鏡頭多旋翼無人機進行影像采集,無法同時獲得豎直和傾斜方向的影像,所以需從不同方向敷設(shè)折線型航線并多架次采集。如圖2所示,本次折線型航線共5條,其中航線1為垂直攝影航線;航線2為自西向東傾斜攝影航線;航線3為自南向北傾斜攝影航線;航線4為自東向西傾斜攝影航線;航線5為自北向南傾斜攝影航線。
1.2 環(huán)繞型航線影像采集方法
環(huán)繞型航線影像采集方法是無人機在航拍過程中的飛行軌跡是環(huán)形的,即通過遙控器控制無人機尋找被攝地物上空一點(俯視圖正中心)作為興趣點,以地物垂直中軸線為環(huán)繞軸,設(shè)置飛行高度和環(huán)繞半徑,調(diào)整相機傾斜角度,自動控制無人機繞地物環(huán)形飛行,手動控制以相同時間間隔拍攝,以保證相鄰航片的重疊度,如圖3所示。

圖2 圖書館折線型航線示意圖Fig.2 Schematic diagram of library curve lines

圖3 環(huán)繞型航線示意圖Fig.3 Schematic diagram of circular route
環(huán)繞型航線影像采集方法常用于傾斜攝影影像數(shù)據(jù)獲取中。對于獨立地物,如獨棟建筑、大型雕像、高塔、山頂?shù)?用環(huán)繞型航線影像采集方法可有效獲取其全方位的側(cè)面信息以及部分地面信息,但是對于大面積建筑群,這種環(huán)繞攝影的方法并不適用。由于建筑物的高度不一致,導(dǎo)致影像上的地面采樣間隔(GSD)波動較大,并且相鄰建筑物之間存在遮擋問題,航拍過程中可能會出現(xiàn)漏拍現(xiàn)象,從而導(dǎo)致側(cè)面信息缺失。如果對每個建筑物進行環(huán)繞拍攝,雖然能夠獲得較為詳細的側(cè)面信息,但是大大增加了工作周期,而且由于建筑物的遮擋,無法保證無人機的安全。因此,對于大面積建筑群,采用折線型航線方案較為合適。
1.3 影像采集
實驗所需航攝影像采用大疆Phantom 4 Pro消費型多旋翼無人機,依據(jù)不同航線方案進行影像采集。所拍攝圖書館建筑物周圍道路密集,樹木較多,人流量大,考慮到無人機安全問題,選擇距圖書館一定距離的操場作為無人機的起降點,并在晴天光線良好的時間段進行數(shù)據(jù)采集。基于DJI GO4飛控軟件控制無人機,相對航高為100 m,航向重疊度為70%,旁向重疊度為60%。
折線型航線拍攝時相機傾斜角度設(shè)為45°,共5條航線,首先執(zhí)行垂直攝影航線,再依次執(zhí)行傾斜攝影航線。根據(jù)建筑物三維建模對其影像的要求,將獲取的影像進行篩選,去除無關(guān)影像后剩余101張,以減少后期空三處理時間,部分影像如圖4所示。
對于單獨的建筑物來說,采用環(huán)繞型航線飛行方案遙控無人機到圖書館上空,選擇興趣點環(huán)繞飛行模式。以圖書館垂直中軸線為環(huán)繞軸,讓無人機到達指定航高(100 m)位置, 再以無人機所在位置為水平面,控制無人機向圖書館西側(cè)飛行到達指定半徑位置(110 m),調(diào)整相機傾斜角度為45°,以2 s為拍攝間隔,手動操作連續(xù)拍攝,環(huán)繞型航線影像采集共計82張影像。部分影像(相鄰4張航片)如圖5所示。
2 基于單鏡頭無人機傾斜攝影的建筑物三維模型構(gòu)建
2.1 像控點布設(shè)與測量
外業(yè)實測過程中控制點的布設(shè)與測量對內(nèi)業(yè)最終成果的精度有很大的影響。 因此, 在選擇控制點位置時, 應(yīng)遵從控制點布設(shè)原則并選擇合適的布設(shè)方案。 運用GPS RTK測量方法+CORS系統(tǒng)測量像控點的大地坐標, 外業(yè)像控點坐標測量共計26個點, 點位分布如圖6所示, 因圖書館東部樹木較多, 坐標數(shù)據(jù)質(zhì)量不高, 僅保留1個點, 經(jīng)過數(shù)據(jù)預(yù)處理之后個別像控點坐標如表1所示。
2.2 建筑物三維模型構(gòu)建
2.2.1 數(shù)據(jù)處理 以實驗采集的數(shù)據(jù)作為模型構(gòu)建的基礎(chǔ)數(shù)據(jù),包括原始影像和外業(yè)實測像控點坐標,通過Context Capture 軟件建立圖書館三維實景模型。處理流程如圖7所示。
2.2.2 成果生成 經(jīng)過空三運算之后, 符合精度要求的像控點共計20個, 包括16個檢查點和4個控制點。 Context Capture軟件的產(chǎn)品輸出格式有3MX、 OSGB、 OJB、 S3C等。 本文主要輸出3MX格式下的圖書館灰度模型、 TIN模型、 TIN+灰度模型以及三維實景模型。 折線型及環(huán)繞型獲取的影像, 通過內(nèi)業(yè)處理后得到的成果如圖8及圖9所示。

圖4 折線型航線航攝部分影像Fig.4 Aerial photography of a part of the images

圖5 環(huán)繞型航線航攝部分影像Fig.5 Partial circular aerial photography

圖6 點位分布示意圖Fig.6 Diagram of point location distribution
3 精度分析及比較
三維模型的實際精度評定可從模型的平面精度、高度精度、地形精度、DOM精度、模型精細度以及紋理精細度等六方面來評定[8-9]。本文主要從模型的平面精度、高度精度以及代表性線段長度精度方面對圖書館三維模型進行精度評定。

圖7 內(nèi)業(yè)處理流程Fig.7 Internal industry processing flow
3.1 平面精度
空三解算后,16個檢查點的平面誤差統(tǒng)計如表2所示。
圖書館三維模型的平面精度分析結(jié)果:環(huán)繞型航線模型的平面誤差最大為0.104 m,最小為0.019 m, 平面RMS為0.065 m; 折線型航線模型的平面誤差最大為0.126 m,最小為0.009 m,平面RMS為0.049 m。由圖10平面誤差分布圖可知,環(huán)繞型航線模型的平面誤差主要分布在0.020~0.080 m,折線航線模型的平面誤差主要分布在0~0.060 m。按照三維地理信息模型數(shù)據(jù)產(chǎn)品規(guī)范[10]中7.3節(jié)平面精度的規(guī)范要求,成圖比例尺1∶500時,三維模型的平面精度為0.3 m,本文中的兩種模型平面精度均高于規(guī)范要求。

表1 個別像控點坐標
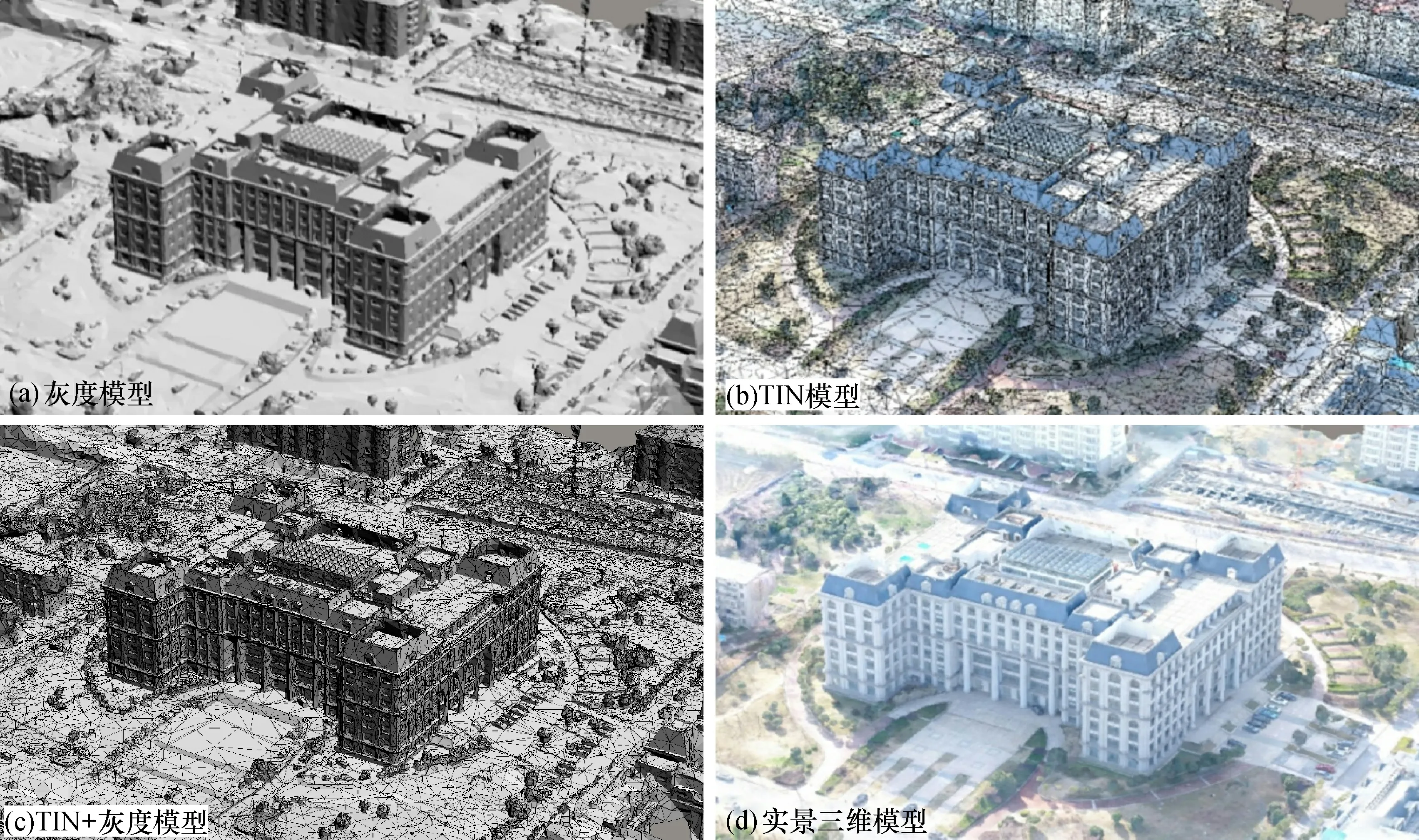
圖8 折線型航線圖書館三維模型成果Fig.8 3D model results of the library after the curve line shooting

圖9 環(huán)繞型航線圖書館三維模型成果Fig.9 3D model results of the library after the airstrip shooting
表2 兩種模型的點位平面誤差統(tǒng)計
Table 2 Point plan eerror statistics of two models m
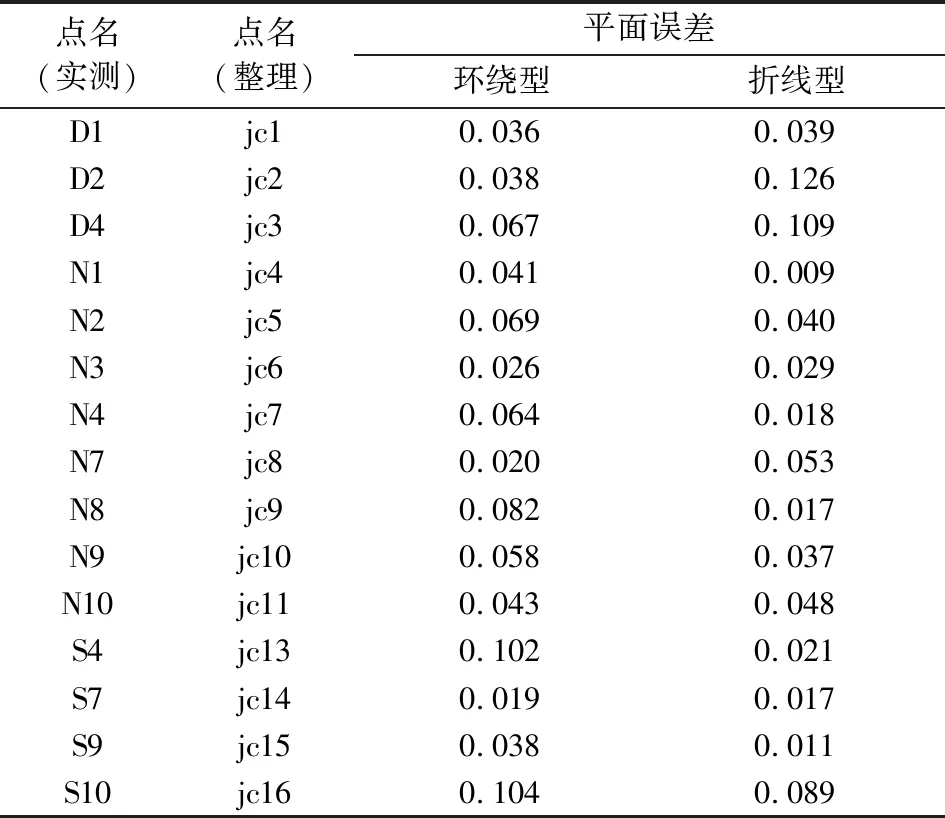
點名(實測)點名(整理)平面誤差環(huán)繞型折線型D1jc10.0360.039D2jc20.0380.126D4jc30.0670.109N1jc40.0410.009N2jc50.0690.040N3jc60.0260.029N4jc70.0640.018N7jc80.0200.053N8jc90.0820.017N9jc100.0580.037N10jc110.0430.048S4jc130.1020.021S7jc140.0190.017S9jc150.0380.011S10jc160.1040.089
3.2 高度精度
空三解算后,16個檢查點的高度誤差統(tǒng)計如圖11所示。圖書館三維模型的高度精度分析結(jié)果:環(huán)繞型航線模型的高度均方差RMS為±0.080 m;折線航線模型的高度均方差RMS為±0.041 m。按照三維地理信息模型數(shù)據(jù)產(chǎn)品規(guī)范[10]中7.4節(jié)高度精度的規(guī)范要求,成圖比例尺1∶500時,三維模型的高度精度為0.5 m,本文中的兩種模型的高度精度均高于規(guī)范要求。
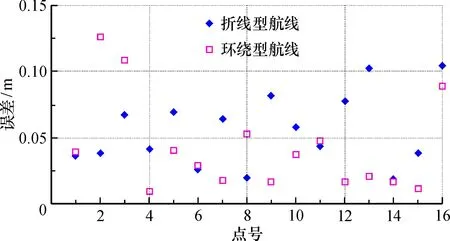
圖10 建筑物模型檢查點平面誤差分布圖Fig.10 Plane error distribution of checkpoint in construction model

圖11 建筑物模型檢查點高度誤差分布圖Fig.11 Height error distribution of checkpoint in construction model
3.3 長度精度
根據(jù)數(shù)字城市建設(shè)對三維數(shù)據(jù)的精密要求,不僅需要建筑物的實景化視覺效果,而且對建筑物的面積、 角度、 長度等屬性也需要很高的要求。 因此, 本文在模型構(gòu)建完成后, 又通過外業(yè)丈量測得12條線段長度, 與模型上相對應(yīng)的線段長度進行長度精度分析,如圖12所示, 并根據(jù)中誤差計算公式計算線段長度的中誤差。 圖書館模型的長度精度分析結(jié)果: 環(huán)繞型航線模型的長度誤差最大值為0.2 m, 中誤差為0.072 m; 折線航線模型的長度誤差最大值為0.13 m, 中誤差為0.048 m。

圖12 模型線段長度與實測長度差值分布圖Fig.12 Line length difference between simulated and measured value
綜合對兩種模型的平面精度、高度精度和長度精度的分析可知,本次圖書館模型構(gòu)建平面精度與高度精度完全滿足規(guī)范的規(guī)定,且折線型航線模型較環(huán)繞型航線模型精度高、效果更好。
4 結(jié) 論
本文以單獨建筑物為研究對象, 利用多旋翼單鏡頭無人機, 分別采用折線型和環(huán)繞型航線的影像采集方法獲取建筑物的影像數(shù)據(jù), 結(jié)合外業(yè)測量的像控點坐標, 通過Context Capture 軟件建立建筑物的三維景觀模型, 并從模型的平面精度、 高度精度以及線段長度精度三方面對不同航攝方案所構(gòu)建的模型進行分析與比較可知: 基于單鏡頭無人機在不同航攝方案下建立的三維景觀模型滿足三維地理信息模型數(shù)據(jù)產(chǎn)品的規(guī)范; 在本次研究中, 折線型航線方案所構(gòu)建的模型較為精確。 相較于傾斜攝影機單鏡頭無人機傾斜攝影成本較低、 空域限制小、 像片分辨率高、 顏色真實, 更有利于傾斜攝影技術(shù)的推廣, 滿足數(shù)字城市快速發(fā)展所需的高效、 精確的建筑物三維地理信息的需求。
本文的不足之處是未對兩種模型的面積、地形精度、DOM精度、模型精細度以及紋理精細度等方面進行評定,在后續(xù)的研究將深入分析上述建模精度。另外,對于數(shù)據(jù)采集方案中,采集過程導(dǎo)致誤差的原因分析將是后續(xù)工作的重點研究內(nèi)容。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19