月面巡視器車載機械臂采樣方案設計
2019-10-31 01:35:10李籽興
載人航天 2019年5期
李籽興,陳 鋼,盧 瑤
(北京郵電大學自動化學院,北京100876)
1 引言
月球是人類深空探測的首選目標,月球探測的多個領域都需要月面機器人[1]。其中,為勘測月面礦物和巖石分布情況,需要基于巡視器采樣進行月面探測。采樣過程中,機械臂末端與樣本會發生接觸碰撞,接觸力過大會影響采樣任務的執行甚至損壞機械臂。因此需要設計采樣策略以保證機械臂采樣任務的安全性。
本文借鑒陳萌等[2-3]土壤切削力學建模方法以及機械臂控制方法,在建立的機械臂動力學模型和末端執行器-月壤接觸力學模型的基礎上,根據末端接觸力與入土角和采樣速度之間的函數關系,選定使采樣時末端接觸力最小的采樣方案,并結合力/位混合控制方法設計了末端接觸力的控制方法,以保證采樣過程中機械臂的有效控制以及安全性。
2 動力學模型
月面巡視器車載機械臂6自由度模型連桿坐標系如圖1所示。
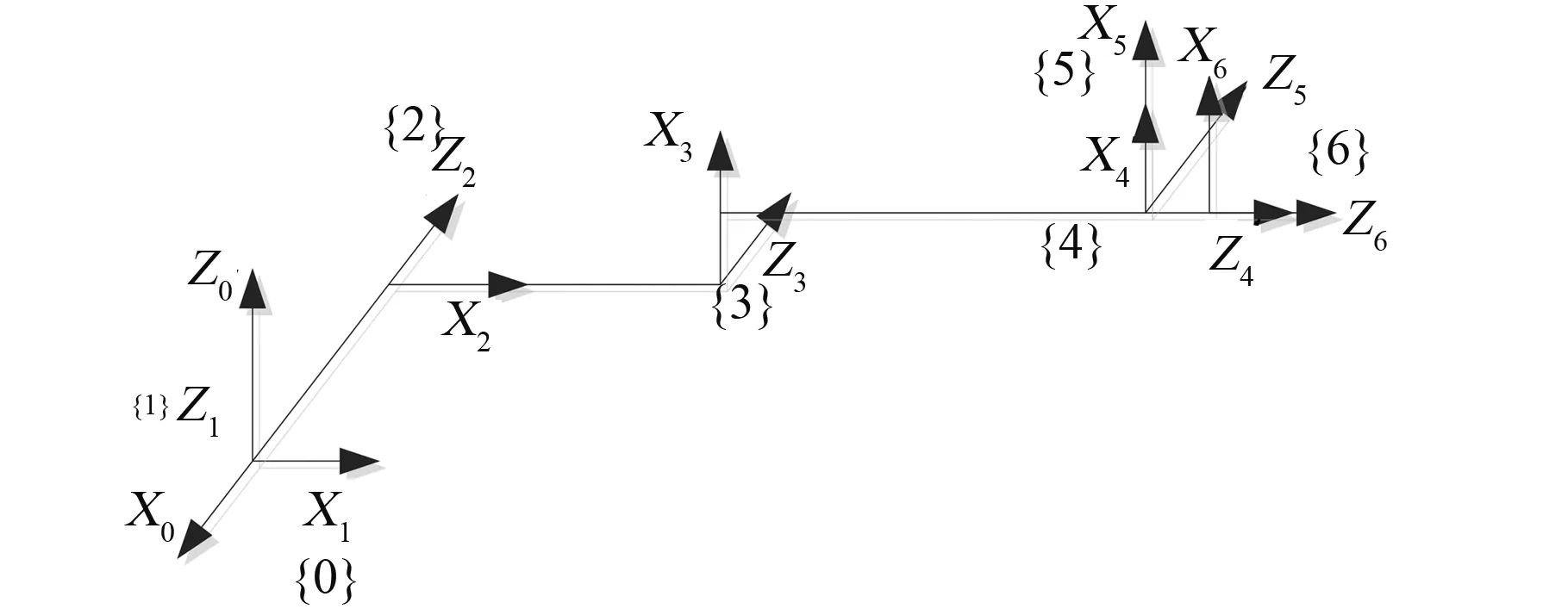
圖1 6自由度機械臂DH坐標系Fig.1 DH coordinate system of a 6-DOF manipulator
根據機器人學[4]各連桿質心所受慣性力IFk及慣性力矩INk如式(1):

其中,k表示第k個連桿,R表示旋轉矩陣,m表示質量,ω表示關節角速度,I表示慣性矩陣。各連桿所受外力Ifk和外力矩Ink如式(2):
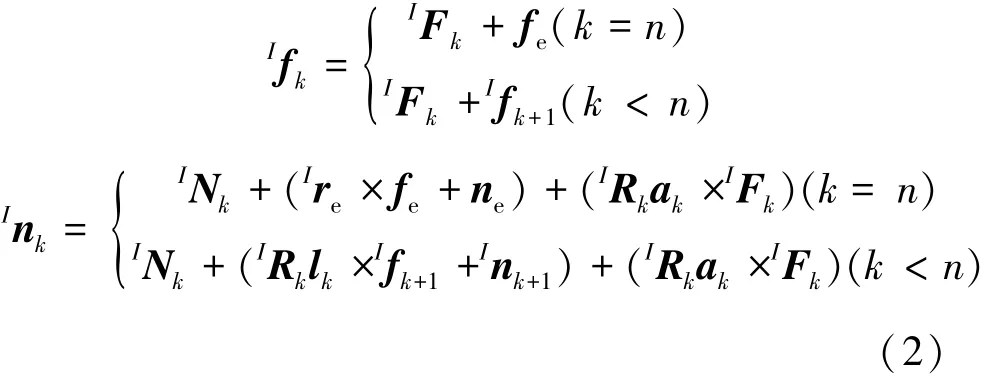
fe及ne為末端操作力及操作力矩,各關節力矩 τ =[τ1,τ2,…,τn]T∈ R Rn×1,τk=InTk·I z k。
3 采樣策略
3.1 采樣器與月壤作用力學模型
本文采用如圖2所示采樣挖掘器。挖取機構板寬為w、頂板長度為a、底板寬度為b、圓弧板長度為R、側邊厚度和底邊厚度為d1。 月面土壤特性如表 1~2所示[5]。
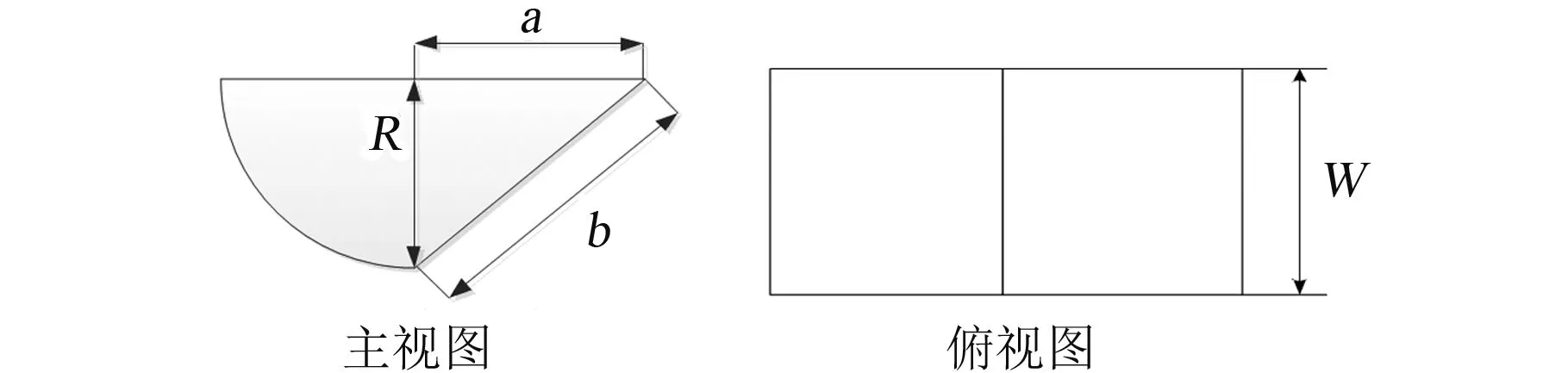
圖2 挖掘器結構Fig.2 Excavator structure
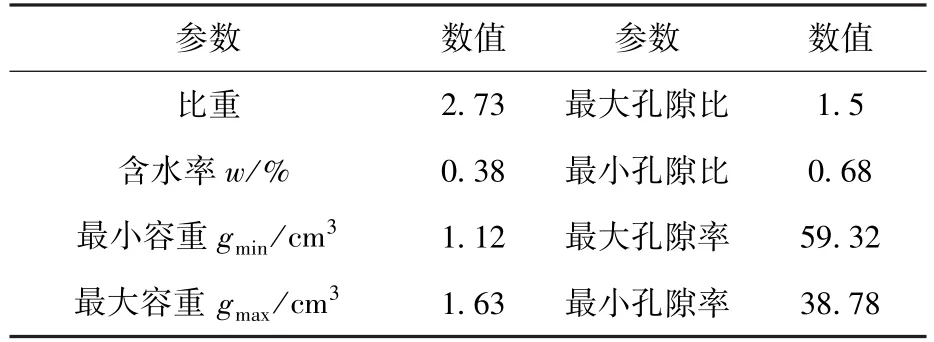
表1 月壤物理力學性質Table 1 Mechanical properties of lunar soil
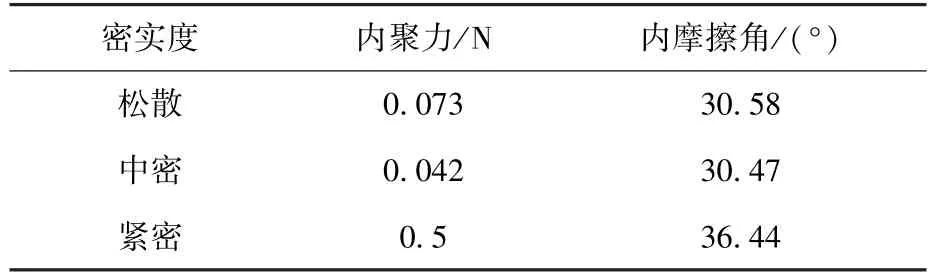
表2 月壤剪切特性Table 2 Shear characteristics of lunar soil
采樣接觸力主要與采樣過程狀態相關。機械臂采樣可分為插入、切削、旋轉抬起3部分。插入過程實際可轉換為切削深度隨鏟斗運動變化的切削過程,旋轉抬起過程與切削過程的主要區別在于切削為平移,速度方向水平,而旋轉抬起為定軸轉動。可將總的采樣過程簡化為以切削深度、切削速度等為變量的切削過程。采樣方案主要是調整末端采樣姿態、操作速度、采樣方向對末端接觸力的影響,使接觸力最小,因此首先要研究采樣接觸力與采樣過程中各變量的關系。采樣器受力如圖3所示。
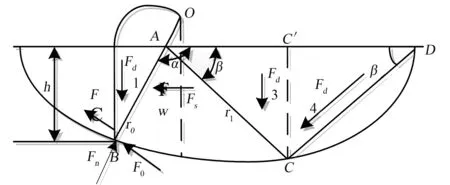
圖3 末端采樣器采樣過程受力示意圖Fig.3 Diagram of force on the sampler during sampling
可認為末端執行器在整個采樣過程均為勻速運動(平移和轉動),末端加速度和角加速度為0,因此忽略慣性力的作用。月壤樣本對采樣器的接觸力主要由式(3)~(13)所示6個部分組成:
1)月壤剪切阻力:

其中,Kh為挖掘阻力系數,ρ為土壤密度,ω為鏟斗切削角速度,h為入土深度。
2)月壤粘著阻力:

其中,c為月壤粘著力。
3)已挖掘月壤對采樣器產生的阻力:

其中,FD1如式(6)所示,為鏟斗內月壤重力產生的阻力:

式中,AN為鏟斗內側壁面積,g為月面重力加速度,KC為松散系數,φ為月壤內摩擦系數。FD2如式(7)所示,為鏟斗外月壤與鏟斗尖部產生的摩擦阻力:

式中,ξ為月壤與鏟斗間的摩擦系數,R為切削半徑。FD3如式(8)所示,為剪斷土體的月壤重力產生的阻力:

式中, Wd1=Ad1b=(r21-r20)bφ/4,Wd2=r21b cosβsinβ,Wd3=0.00873r2γh。 其中,α 為鏟斗與采樣面傾角(入土角),β為剪斷直線段與采樣面夾角。FD4如式(9)所示,為被剪斷土體與未挖掘土體的摩擦阻力:

4)月壤對鏟斗內側面的摩擦阻力:

式中,KS為側壓系數。
5)月壤對鏟斗外側面的摩擦阻力:

式中,AW為鏟斗外側壁面積。
6)與速度相關的挖掘阻力:
在挖掘過程中,單位時間內的待挖掘土壤對執行器會產生與其挖掘速率相關的挖掘阻力。待挖掘土壤微元體進行運動學分析如圖4所示。
圖4 月壤微元體運動示意圖Fig.4 Schematic diagram of soil micro-element
在單位時間d t內鏟斗內會產生新的月壤微元體,其質量為 d m=ρwVed t d z。
由動量定理可得d t時間段內深度在z處的鏟斗微元受到的挖掘阻力為式(12):

積分得到鏟斗所受總接觸力為式(13):


3.2 采樣方案設計
月壤可根據其密實度大致分為松散、中密、緊密3種。本文分別對3種不同狀態月壤下的采樣方案進行設計。不同松散度的月壤性質如表3所示[5]。
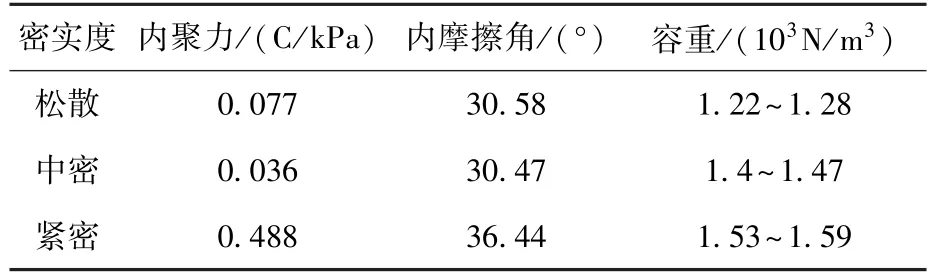
表3 不同松散度月壤力學特性Table 3 Mechanical properties of different compactnesslunar soil
根據接觸阻力力學模型式(13),代入不同緊密程度土壤下入土角數據,得到不同月壤性質下接觸阻力隨采樣入土角的變化趨勢如圖5所示。
由圖5可知,接觸阻力隨著入土角的增大,呈現先增后減的趨勢,故存在最優的入土角,使得接觸阻力最小化。松散土壤與中密土壤阻力曲線最優入土角分布在[50°,70°]之間,緊密土壤下末端采樣最優入土角分布在[40°,60°]之間。
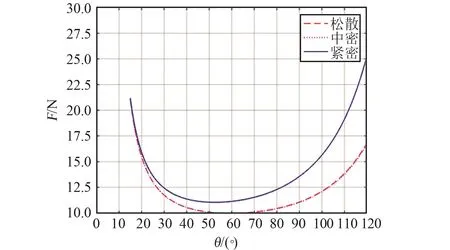
圖5 接觸阻力與入土角關系圖Fig.5 Relationship between contact force and angle
為更明顯地體現入土角與接觸阻力及月壤性質的關系,繪制在不同月壤下、不同入土角下,接觸阻力隨挖掘深度變化如圖6所示。可見隨著采樣深度的增加,接觸阻力隨之增大,在同樣的采樣深度時,在最優角度范圍外的入土角產生的接觸阻力大于范圍內入土角產生的接觸阻力。
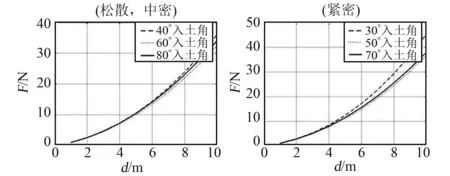
圖6 接觸阻力隨采樣深度變化圖Fig.6 Relationship between contact force and sampling depth
除了入土角之外,末端接觸阻力還與末端執行器速率相關。由式(13)可知,在其他變量維持常量的情況下,接觸阻力隨挖掘速率的增大成恒定遞增的關系,但隨著挖掘速率的增大,挖掘阻力增大,挖掘效率提高,隨著挖掘速率的減小,挖掘阻力雖然減小,但挖掘效率隨之降低。任務需求在保證挖掘效率的前提下,盡可能減小接觸阻力。需要綜合兩點互相沖突的任務目標來選取挖掘速率。
可認為挖掘過程末端速度恒定,則接觸阻力即為挖掘阻力,挖掘阻力與挖掘速率呈式(15)所示正相關關系:

由挖掘時間衡量挖掘效率,其與挖掘速率呈式(16)所示負相關關系:

選取權重比A1、A2,結合兩個任務目標,確定總目標函數如式(17),且確保兩分目標不會超出各自極限。

其中 v∈[5,30](mm/s)。 取A1=0.9、A2=0.1,得到總目標值隨挖掘速率變化如圖7所示。
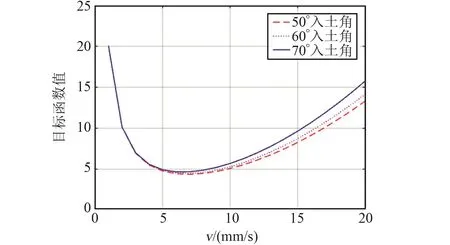
圖7 優化目標值與挖掘速率關系圖Fig.7 Relationship between optimized goal and speed
由圖可知,在采樣速率分布在[5,10]mm/s之間時,目標函數值存在最優值。初步設計采樣方案如表4所示。
對不同密實度下的月壤,利用Matlab軟件分析入土角和挖掘速率影響,結果如圖8~10所示。
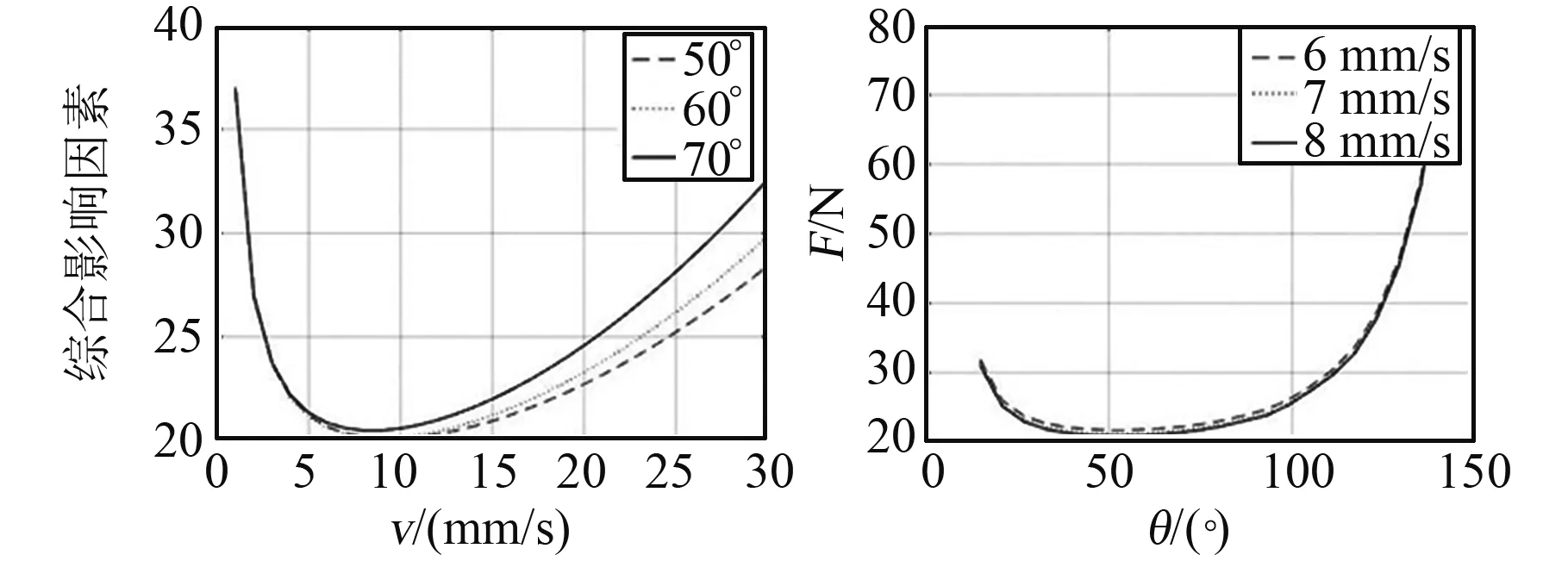
圖8 松散狀態月壤初步方案結果Fig.8 Results of preliminary scheme for loose lunar soil
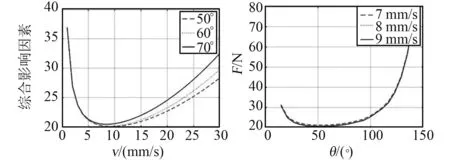
圖9 中密狀態月壤初步方案結果Fig.9 Results of preliminary scheme for medium loose lunar soil
從而設計3種狀態月壤下的最佳采樣方案如表5。
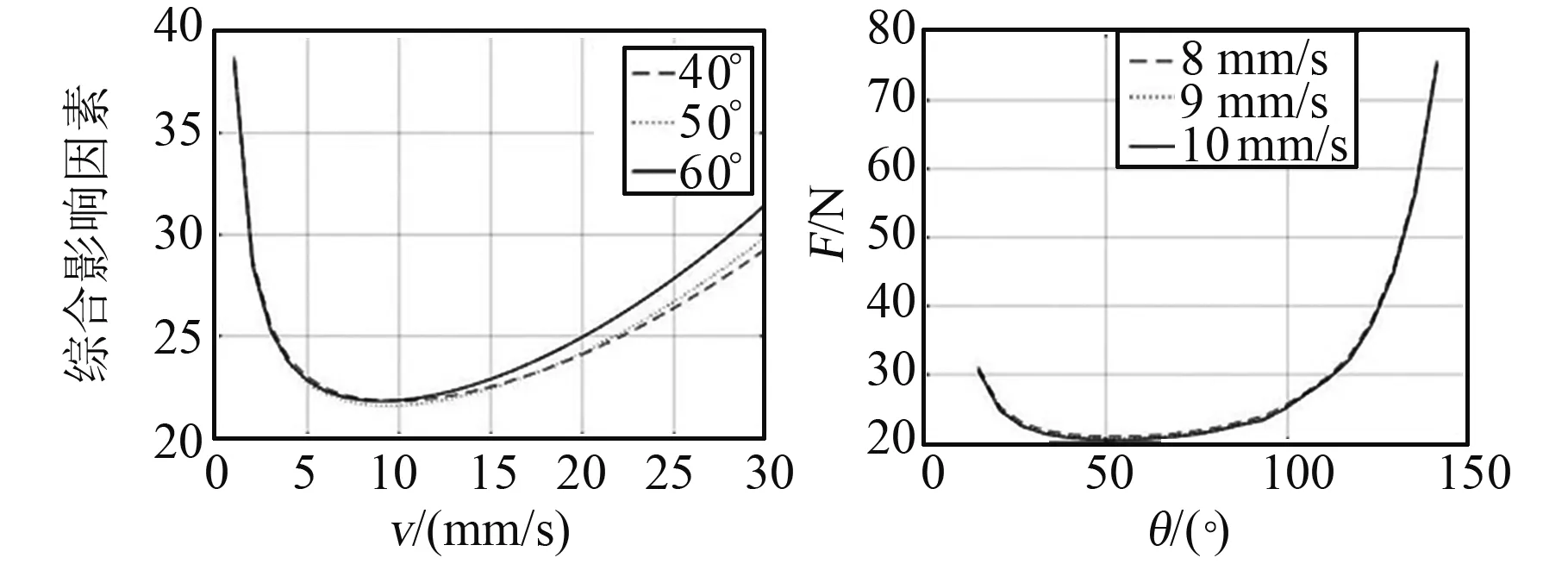
圖10 中密狀態月壤初步方案結果Fig.10 Results of preliminary scheme for compact lunar soil
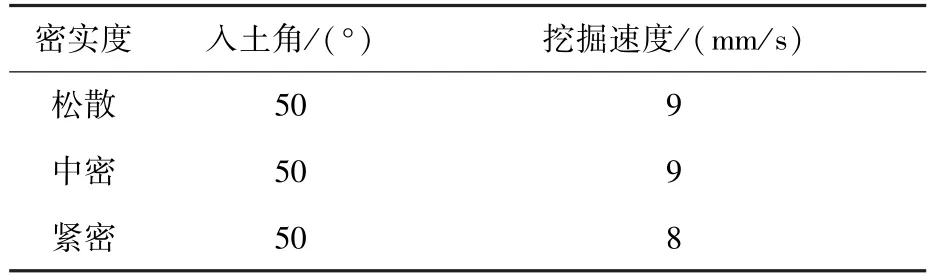
表5 最佳采樣方案Table 5 Optimal sampling scheme
4 接觸力控制策略
4.1 機械臂力/位混合控制方法
在機械臂操作空間中分別引入位置控制律和力控制律如式(18):

將控制律由操作空間向關節空間轉化可得關節空間位置控制和力控制律如式(19):

根據環境的約束情況建立約束坐標系{C},針對末端任務將任務空間分為位控子空間和力控子空間,分別在位控子空間和力控子空間實現對機械臂的控制,在位控子空間和力控子空間分別設定控制律如式(20):

其中,S-、S為操作臂力/位混合控制對角選擇矩陣,有S-=I-S。

圖11 機械臂力位混合控制系統框圖Fig.11 Block diagram of manipulator compliant control system
4.2 仿真驗證
接觸力控制主要發生在機械臂末端與樣本接觸過程中,由機械臂采樣任務規劃模型可知,機械臂在采樣過程中,末端以恒定姿態沿特定入土角做直線規劃,其接觸力可簡化為與末端運動方向相反的力。設采樣深度depth=0.05 m,機械臂系統控制周期為step=0.05 s,任務總時間total=10 s。
設機械臂初始關節角序列為qin=[-1.326,3.247,1.622,2.052, -1.025, -0.310]rad, 此時,機械臂末端在直線規劃的起始處。設位置控制增益和力控制增益分別為Kp=diag[0.1,0.1,0, 0, 0.1, 0.1], Kd=diag[15, 15, 0, 15, 15,15],Kpf=diag[0, 0, -0.9, 0, 0, 0], Kd=diag[0,0,0.02,0,0 0]。 采用上一節研究得到的機械臂力位混合控制算法,控制結果如圖12所示。
由上述結果可知,機械臂力位混合控制算法造成的沿約束曲面法線方向的接觸力誤差很小,在2×10-2N以內,在實際操作過程中,該誤差可忽略不計。因此,采用本節研究得到的力位混合控制算法,可保證機械臂在執行采樣任務時,其末端接觸力始終維持在期望范圍內,不會因為末端接觸力的急劇增大導致采樣任務失敗或機械臂系統發生損壞。
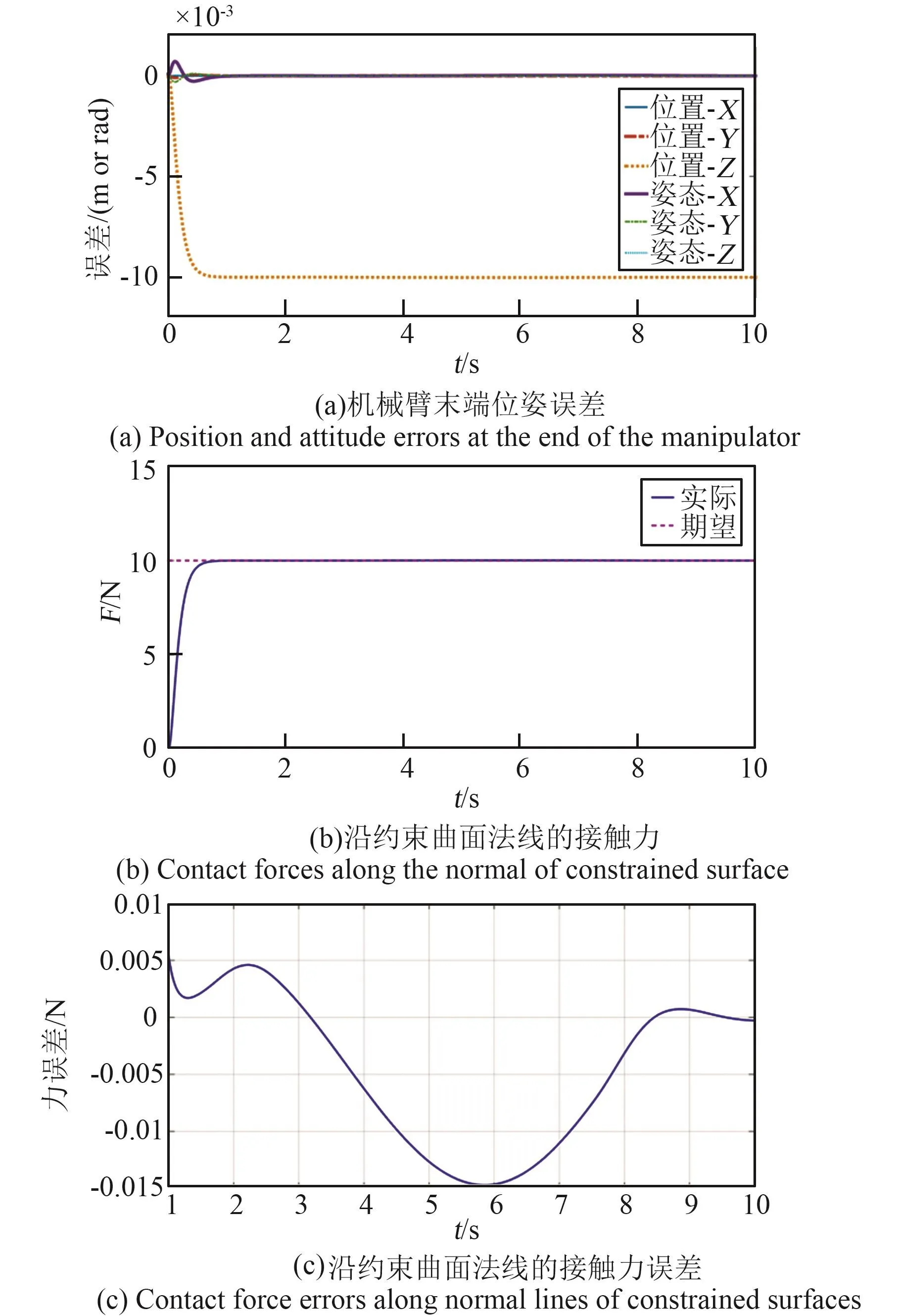
圖12 接觸力控制仿真結果Fig.12 Simulation results of contact force control
5 結論
本文設計的采樣方案能夠快速對末端采樣器接觸力進行控制,使末端-月壤接觸力最小。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09