一種新型主動橫向穩定桿裝置的設計與特性分析*
2019-11-02 02:51:46張紅黨吳海東張鳳嬌江曉瑩
汽車工程 2019年10期
陳 松,張紅黨,吳海東,張鳳嬌,江曉瑩
(1.常州機電職業技術學院,常州 213164; 2.南通航運職業技術學院,南通 226010)
前言
橫向穩定桿作為車輛懸架的輔助彈性元件,主要作用是減小車輛在轉向時的側傾。而對于質心較高的SUV車輛處于高速大轉角等工況時,由于無法根據車輛的行駛狀況調整車輛的側傾角剛度,故會使車輛容易發生側翻[1]。針對傳統被動橫向穩定桿存在的問題,一種能夠根據車輛的行駛狀況,主動調整車輛側傾角剛度的主動橫向穩定桿(AARB)裝置成為了研究的熱點[2]。
英國劍橋大學的Sampon團隊[3-4]針對質心較高的鉸接車輛容易出現側翻的問題,采用液壓式AARB裝置并建立了主動側翻控制模型,通過仿真與試驗驗證了該AARB裝置能有效避免車輛在高速轉向時的側翻。韓國的KIM等[5]基于液壓式AARB裝置設計了前饋與反饋控制器,并通過仿真與臺架試驗驗證了該裝置對車輛的側傾穩定性具有較好的控制效果。Davide等[6]針對轎車轉向行駛時的側傾控制問題,提出了一種電機控制式的AARB裝置,通過采用魯棒控制提高了對電機轉速的控制效果。華中科技大學段小成等[7]針對SUV車輛在轉彎時容易發生側翻的問題,提出了采用AARB裝置并設計了模糊PID控制器進行控制,通過仿真試驗驗證了該裝置對車輛的側傾控制效果。南京理工大學丁義蘭等[8]針對某重型車輛,提出了一套電機控制式的AARB裝置,依據車輛的不同行駛工況制定了不同的控制策略,有效解決了重型車輛在各行駛工況下的側翻控制問題。江蘇大學鄭恩瑞等[9]分別在MATLAB中建立了AARB的模糊控制器和在ADAMS中建立了整車多體動力學模型,在此基礎上進行了聯合仿真,較好地實現了對車輛側傾的主動控制。
大量的研究都集中在采用液壓控制式或電機控制式的AARB裝置替換傳統的被動橫向穩定桿裝置來實現對車輛轉向側傾時的主動控制,但到目前為止都沒有在對所設計的AARB桿裝置建立側傾角剛度計算模型的基礎上,分析各結構參數對車輛側傾角剛度的影響規律。由于電機控制式的AARB與液壓控制式相比[10],具有響應速度快、結構簡單、成本低、維修與改裝方便等優點,同時考慮到諧波齒輪機構具有傳動比大[11]、體積小、傳動平穩、噪聲小和傳動效率高等諸多優點,本文中基于諧波齒輪結構設計了一種電機控制式的AARB裝置,建立了車輛側傾角剛度的計算模型,分析各結構參數對側傾角剛度的影響規律。在此基礎上,通過試驗來驗證該AARB在車輛側傾控制方面的效果。
1 電動AARB裝置
圖1所示為本文中所提出的電機控制式AARB裝置的結構示意圖,該AARB裝置主要由左右齒輪減速機構、左右穩定半桿、懸架連接臂、ECU和直流電機等組成。電機的電樞軸與左、右兩側諧波齒輪中的波發生器相連。

圖1 AARB結構示意圖
當車輛轉向發生側傾時,ECU驅動直流電機工作,帶動左、右諧波齒輪機構中的波發生器旋轉。在左側的諧波齒輪機構中,波發生器為主動件;由于柔輪與底盤固連,為固定件;剛輪與左側的穩定半桿連接,為輸出件。在右側的諧波齒輪機構中,波發生器為主動件;由于剛輪與底盤固連,為固定件;柔輪與右側的穩定半桿連接,為輸出件。
則左側的諧波齒輪傳動比i[12]為

右側的諧波齒輪傳動比 ih′[12]為

式中:z3為左側諧波齒輪機構中柔輪的齒數;z4為左側諧波齒輪機構中剛輪的齒數;z3′為右側諧波齒輪機構中柔輪的齒數;z4′為右側諧波齒輪機構中剛輪的齒數;n為左側諧波齒輪機構中剛輪與柔輪的齒數差;n′為右側諧波齒輪機構中剛輪與柔輪的齒數差。由于左、右兩側的諧波齒輪機構均采用雙波式,故 n=n′=2。此時式(1)和式(2)變為

選取 z3′=z4時,ih=-ih′,此時左、右橫向穩定半桿輸出大小相等、方向相反的力矩。當車輛轉向發生側傾時,AARB的ECU根據車輛的側傾情況,對直流電機輸出力矩的大小與方向進行控制,通過左、右兩側的諧波齒輪減速機構,使左、右穩定半桿產生較大的反力矩,實現對車輛側傾的主動控制。由于車輛轉向時的車速與轉向盤轉角不同導致車輛的側向加速度不同,對應的側傾角也不同,為使車輛的側傾隨側向加速度的變化符合駕駛員感知規律,以便駕駛員通過采取減速等方法減小車輛進一步的側傾,防止車輛側翻的發生,側向加速度與理想側傾角間的變化關系應具有如圖2中的0ABC線段所示[13]。
車輛側傾控制時,ECU通過對側向加速度傳感器的采樣經計算得到車輛的理想側傾角,并將其與實際側傾角的差值作為如PID、模糊、滑模等控制器的輸入參數,輸出參數為直流電機產生的轉矩,實現對車輛理想側傾角的跟蹤。
當車輛直線行駛在較平坦路面上時,車輛產生的側傾角較小,ECU對電機不供電,電機不工作以減少能耗和延長直流電機的使用壽命。當一側路面有較小顛簸或兩側均有較小顛簸但一側顛簸程度大于另外一側時,ECU同樣不對電機供電。現以左側為例對AARB中電機不供電的情況進行分析:左側路面的較小顛簸會使得左側的橫向穩定半桿產生較小的轉矩T1帶動左側諧波齒輪機構的剛輪產生轉動,由于左側的柔輪固定,此時左側波發生器變成了從動件,電機輸出軸被拖動。

圖2 側向加速度ay與理想側傾角φ特性圖
此時,電機輸出軸得到的轉矩為

將式(5)進一步化簡得

由于電機的輸出軸同時與左、右諧波齒輪機構的波發生器固連,故電機輸出軸的轉動會使右側諧波齒輪機構中的波發生器轉動進而帶動右側穩定半桿的轉動。此時,右側的波發生器仍為主動件,右側的剛輪為固定件,柔輪為從動件。
同理可得右側穩定半桿得到的轉矩為

式中:Tm為電機輸出軸得到的轉矩,N·m;T1,T′1分別為左、右側橫向穩定半桿產生的轉矩,N·m;
前面已得出 ih=-ih′ ,聯合式(6)與式(7)得

即左、右兩側的穩定半桿產生大小相等、方向相反的轉矩。故當一側路面有較小顛簸或兩側均有較小顛簸但一側顛簸程度稍大于另一側時,AARB在功能上相當于被動橫向穩定桿。同樣,當ECU出現故障時,ECU對電機也不供電,電機不工作。此時AARB在功能上也相當于被動橫向穩定桿,增加了AARB裝置的可靠性。
2 側傾角剛度計算
當車輛發生側傾時,ECU觸動直流電機工作,通過兩側的諧波齒輪機構帶動左右穩定半桿相對扭轉,從而使AARB從原來車輛沒有發生側傾時的ABCDEF位置變成車輛發生側傾時的A’BCDEF’位置,如圖3所示。圖中:BE為桿件體;C,D點通過橡膠套與懸架彈簧下支座連接;AB,EF為與桿件體相連的連接桿,并假設穩定桿的桿件在承受側傾力矩時只發生扭轉,不產生彎曲。

圖3 AARB側傾時的幾何關系及受力圖
車輛發生側傾時,采用變形疊加法得A’和F’兩點沿z方向的絕對位移量Δz,為車輛側傾引起的垂直位移與AARB作用時產生的位移之和,即

則AARB在zox平面內的絕對轉角β為

因此,AARB對應的側傾角剛度Kφ為

將式(9)代入式(11)并化簡得

根據車輛發生側傾時的幾何關系,結合圖2得

考慮到 φb,φ較小,有 tanφb≈φb,tanφ≈φ,將式(13)和式(14)分別化簡得


由式(15)和式(16)得

根據車輛發生側傾時電機經過諧波齒輪減速機構產生的轉矩與AARB產生的對車輛反側傾力矩的關系,得出圖2中A’點所受的力Frod為

對式(18)化簡得

將式(17)和式(19)代入式(12)得

式(9)~式(20)中:Δz為 A’,F’兩點沿 z方向的絕對位移量(兩者相等),m;φb為左、右兩側穩定半桿經減速機構后各自輸出的轉角(兩者相等),(°);φ為車身側傾角,(°);f為 AARB左、右搖臂末端的垂向位移(兩者相等),m;L為橫向穩定桿的橫向總長度,m;b為穩定桿搖臂的縱向長度,m;A’B與BE和EF’與BE的夾角均為α,(°);Frod為AARB作用時對搖臂末端產生的垂向力,N;MT為穩定半桿產生的轉矩,N·m;MR為AARB產生的反側傾力矩,N·m;E為材料的彈性模量,Pa;I為穩定桿主慣矩,m4。
3 側傾角剛度影響參數分析
當車輛轉向側傾時,AARB根據車輛的側傾情況,通過改變電機輸出轉矩的大小與方向來調節車輛側傾角剛度,以實現對車輛側傾的主動控制。為研究通過改變AARB的側傾角剛度實現對車輛側傾的主動控制,須對AARB側傾角剛度的影響因素進行分析。在實際安裝時,橫向穩定桿的橫向總長度L一般為定值,根據式(20)中的主要影響參數并結合某一車型,該車的主要參數如表1所示。針對該車的穩定桿安裝與工作的實際情況[14],取參數MT=80~175 N·m,60°≤α≤120°,b/L=0.15~0.4,φb=2°~9°,進行AARB作用時的車輛側傾角剛度特性的分析。
(1)α對車輛側傾角剛度的影響

表1 車輛參數
在研究α對車輛側傾角剛度影響時,取α=90°為參考點,并定義不同α值下的車輛側傾角剛度相對于參考值α=90°時的變化率為

分別改變 φb,MT和 b/L進行仿真,分析不同φb,MT和b/L下,ΔKφ隨α的變化關系,結果如圖4~圖6所示。

圖4 b/L=0.25,M T=110 N·m,φb取不同值時,剛度變化率與α的關系
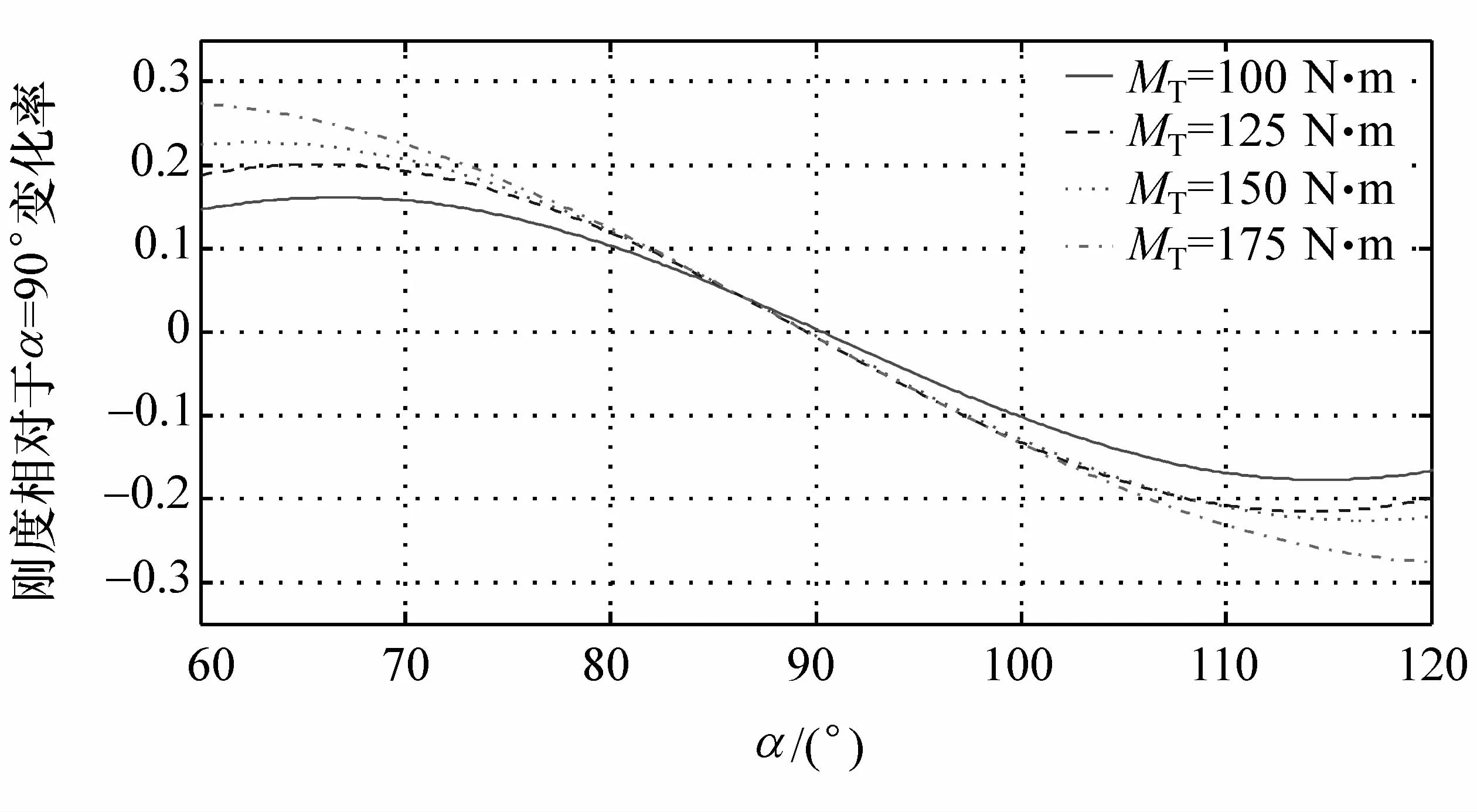
圖 5 b/L=0.25,φb=6°,M T取不同值時,剛度變化率與α的關系

圖 6 M T=110 N·m,φb=6°,b/L取不同值時,剛度變化率與α的關系
由圖4~圖6可知,在b/L,MT,φb分別取不同的值時,隨著AARB的中部與縱向部分的夾角α的增加,車輛的側傾角剛度減小。但總的來說α對車輛的側傾角剛度影響較小,為方便分析其它參數對車輛側傾角剛度的影響,以下均取α=90°進行分析。
(2)b/L對車輛側傾角剛度的影響分析
取b/L=0.25為參考點,同樣由式(21)定義不同b/L值時的車輛側傾角剛度相對于參考值b/L=0.25的變化率 ΔKφ,再分別改變 φb和 MT進行仿真,分析不同φb和MT下ΔKφ隨b/L的變化關系,結果如圖7和圖8所示。

圖7 M T=110 N·m,φb取不同值時,剛度變化率與b/L的關系

圖8 φb=6°,M T取不同值時,剛度變化率與b/L的關系
由圖7和圖8可知,在MT與φb分別取不同的值時,AARB搖臂的縱向長度與橫向總長度的比值對AARB的側傾角剛度影響較大,b/L的增加會明顯減小車輛的側傾角剛度。一般AARB的橫向總長為定值,故增加 AARB搖臂的縱向長度會降低AARB的側傾角剛度。
(3)MT對車輛側傾角剛度的影響
取MT=110 N·m為參考點,并同樣由式(21)定義不同MT值下的車輛側傾角剛度相對于參考值MT=110 N·m時的變化率ΔKφ,再分別改變b/L和φb進行仿真,分析不同 b/L和 φb下,ΔKφ隨 MT的變化關系,結果如圖9和圖10所示。

圖9 φb=6°,b/L取不同值時,剛度變化率與M T的關系

圖10 b/L=0.25,φb取不同值時,剛度變化率與M T的關系
由圖9和圖10可知,在b/L與φb分別取不同的值時,穩定桿輸出力矩MT對AARB的側傾角剛度有一定影響,但與其它參數不同的是,它的增加會增大車輛的側傾角剛度。由于本文中采用雙頭輸出的電機,故兩側輸出轉矩之和為電機的輸出轉矩。由于左右兩側諧波齒輪的傳動比相同,故雙頭電機的每一側輸出轉矩為電機輸出轉矩的一半,則穩定桿輸出轉矩MT為

由式(22)可知,在直流電機輸出轉矩Tm一定的情況下,增加諧波齒輪傳動比ih,會增加AARB輸出的轉矩MT,從而AARB的側傾角剛度會明顯增加。
(4)φb對車輛側傾角剛度的影響分析
取φb=6°為參考點,并同樣由式(21)定義不同φb值時的車輛側傾角剛度相對于參考值φb=6°的變化率ΔKφ,分別改變b/L和MT進行仿真,分析不同b/L和MT下,ΔKφ隨 φb的變化關系,結果如圖11和圖12所示。
相較于峨眉、昆侖等其他門派對魔教的敵視,武當對于魔教的態度似乎有些模棱兩可。理智上他們覺得魔教行事詭譎,不為道義所容,如張翠山在初識殷素素時就曾因她是天鷹教弟子而抗拒與其交往。但情感上他們卻又能無視對方的身份,對所接受的人付出真心,如張翠山帶殷素素回武當時,師門也對他們表示祝福,并且盡力維護。

圖11 M T=110 N·m,b/L取不同值時,剛度變化率與φb的關系

圖12 b/L=0.25,M T取不同值時,剛度變化率與φb的關系
由圖11和圖12可知,在b/L與MT分別取不同的值時,穩定半桿輸出轉角φb對AARB的側傾角剛度有一定影響,它的增加會減小車輛的側傾角剛度。根據所設計的AARB的工作原理,得

式中θm為直流電機輸出轉角,(°)。
在直流電機輸出轉角θm一定的情況下,增加諧波齒輪傳動比ih,會減小穩定半桿輸出的轉角φb,從而使AARB的側傾角剛度增加,這與在采用MT對AARB的側傾角剛度的分析結論一致。
4 AARB試驗研究
為驗證所設計的AARB在控制車輛側傾方面的效果,搭建硬件在環試驗臺架,如圖13所示。首先在主機上采用MATLAB/Simulink建立整車動力學模型并編寫控制程序,然后將模型和程序經Real-Time Workshop(RTW)轉換成C代碼后下載至目標機上實時運行。采用交流電機代替發動機實現車輪轉速調節,試驗人員根據轉向試驗工況對轉向盤進行操縱,車輛的轉向盤轉角信號、AARB電機轉子位置信號和車輛輪速信號通過研華數據采集卡PCL-818L采集處理后傳遞給目標機。目標機一方面將接收到的信號通過TCP/IP傳給主機;一方面由其上的模型根據接收到控制信號,計算出車輛運行參數數據,如側傾角、側向加速度等,發送給 ECU。ECU據此對AARB的直流無刷電機施行控制,同時通過相應的傳感器將直流無刷電機的轉子位置、電機電流等信號的實時運行參數通過數據采集卡PCL-818L再次傳輸給目標機,實現硬件在環仿真試驗的閉環控制。

圖13 硬件在環試驗臺架
車輛的側翻往往出現在高速轉彎和嚴重的車道變換等極限工況下,由于雙移線工況是國內外使用頻率較高的一種極限測試工況,本文中也采用雙移線工況測試AARB對車輛側傾的控制效果。對車速為80 km/h、行駛在附著系數為0.85的路面上的車輛進行硬件在環試驗,轉向盤轉角輸入如圖14所示。對不施加控制的被動系統(圖中為Open Loop)與AARB控制系統(圖中為AARB)進行對比,仿真結果如圖15~圖17所示。

圖14 轉向盤雙移線輸入

圖15 雙移線輸入下車輛的側傾角

圖16 雙移線輸入下車輛的側傾角速度
5 結論
(1)為實現車輛側傾的主動控制,設計了一種基于諧波齒輪的電機控制式的AARB裝置。

圖17 雙移線輸入下車輛的橫向載荷轉移率
(2)在對該AARB裝置建立側傾角剛度計算模型的基礎上,通過仿真分析各結構參數對車輛側傾角剛度的影響規律。
(3)通過硬件在環試驗得出,在車輛側翻控制方面,裝有AARB的車輛比裝有傳統被動橫向穩定桿的車輛具有更好的控制效果,為采用該種新型AARB來實現對車輛側傾的主動控制提供參考。
