三相逆變器雙閉環(huán)控制系統(tǒng)仿真研究
2019-11-05 11:14:24胡維飛張永明
現(xiàn)代計算機 2019年27期
關(guān)鍵詞:系統(tǒng)
胡維飛,張永明
(上海電機學院電氣學院,上海201306)
0 引言
三相逆變器作為目前極其常見的電子設(shè)備,針對其輸出端的要求也越來越高,例如當負載頻繁變化時表現(xiàn)出較硬的輸出外特性、魯棒性好[1]。目前,對三相逆變系統(tǒng)控制器的研究,主流方法是采用比例積分[2-3]或者PR 控制[4]、重復控制[5]或者無差拍控制[6]等。對于直流輸入信號,其中PI 可以做到無靜差跟蹤,且具有控制結(jié)構(gòu)簡單、動態(tài)響應(yīng)較快以及魯棒性好等特點,在電氣工程領(lǐng)域得到廣泛應(yīng)用。比例諧振(PR)可以對某一特定頻率的正弦交流信號進行跟蹤。但是PR 控制在計算時需要進行離散化處理,并且PR 動態(tài)響應(yīng)速度不如PI 控制。重復控制雖然可以消除幅值和相位的穩(wěn)態(tài)誤差,但是,利用該方法時輸出周期有延遲且動態(tài)響應(yīng)不佳,并且控制器的設(shè)計比較復雜。無差拍控制雖然有著良好的動態(tài)響應(yīng),且無超調(diào)現(xiàn)象,但是其控制特性在系統(tǒng)參數(shù)變化時有較大的影響,魯棒性較差,不利于對輸出電壓的控制[7]。
因此,本文將采用比例積分控制方案,利用電壓外環(huán)電流內(nèi)環(huán)的雙閉環(huán)控制策略作為三相逆變器的控制系統(tǒng)。本文通過詳細介紹三相逆變器的數(shù)學模型,計算雙閉環(huán)控制策略的傳遞函數(shù),最后在MATLAB/Simulink 上搭建逆變系統(tǒng)的仿真模型,驗證控制策略的有效性。
1 三相逆變器的數(shù)學模型
1.1 基于三相靜止坐標系的數(shù)學模型
如圖1 所示為三相逆變器的主電路拓撲結(jié)構(gòu),輸出端采用LC 濾波電路,其中,其中r 為濾波器的等效阻抗。直流側(cè)輸入電壓為udc,A、B、C 三點電壓分別為UA、UB、UC,他們是相對直流輸入端中點P 的三相電壓,輸出端電感電流分別為ila、ilb、ilc,電容電壓分別為Uoa、Uob、Uoc,流入三相負載的電流分別為ioa、iob、ioc[8]。
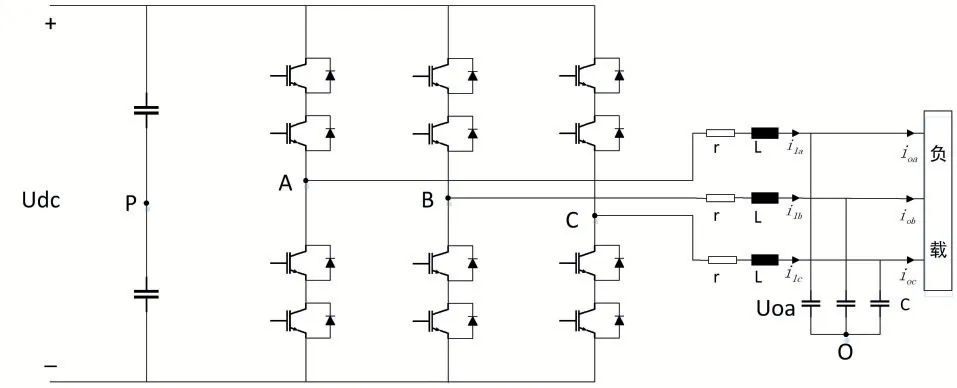
圖1 三相逆變器主電路拓撲圖
由KCL 和KVL 可列出下列方程:
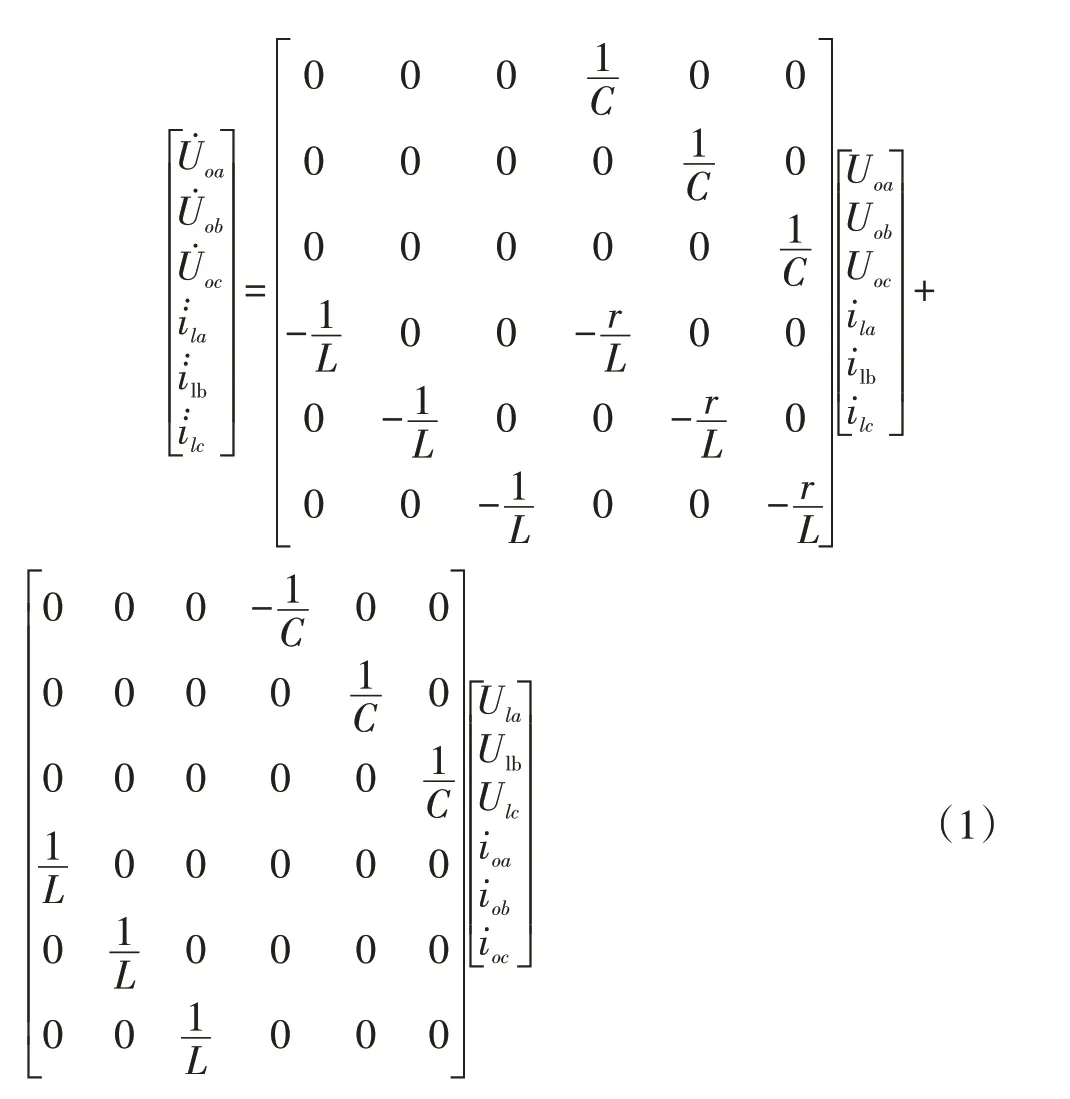
將上式化簡可得:
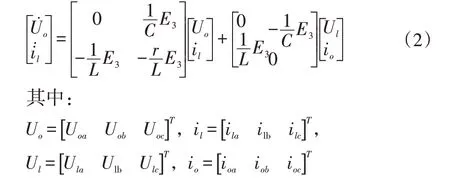
采用電容電壓和電感電流作為狀態(tài)變量,可得通用連續(xù)狀態(tài)空間模型為:

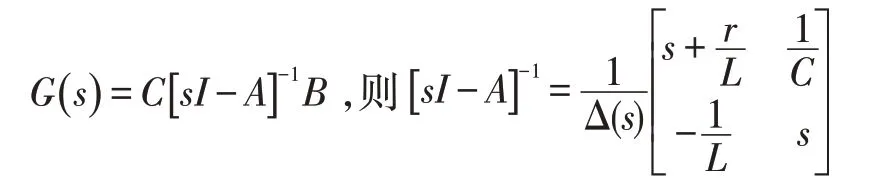
其中Δ(s)=s2+,由此可以求出輸入電壓同輸出電壓之間的傳遞函數(shù)為:

輸入電壓同輸出電流之間的傳遞函數(shù)為:

1.2 基于d-q旋轉(zhuǎn)坐標系下的數(shù)學模型
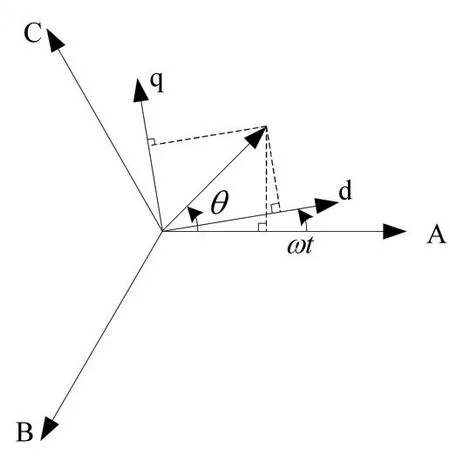
圖2 坐標變換圖
根據(jù)圖2 中各矢量的幾何關(guān)系,可以求出坐標變換后的狀態(tài)空間表達式如下:
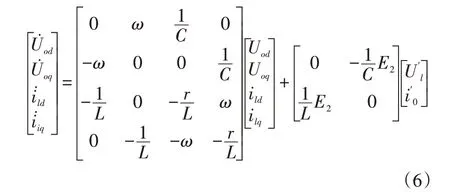
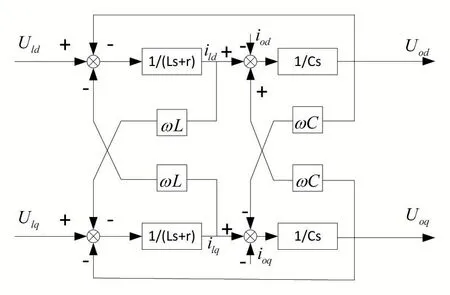
圖3 旋轉(zhuǎn)坐標系下逆變器數(shù)學模型
2 三相逆變器雙環(huán)控制策略分析
對于三相逆變器控制系統(tǒng)的雙閉環(huán)控制策略,電流內(nèi)環(huán)控制可以增加控制系統(tǒng)的帶寬,同時系統(tǒng)的瞬態(tài)響應(yīng)速度更快,當系統(tǒng)帶非線性負載時,適應(yīng)能力更強,且輸出電壓的諧波失真情況也隨之降低,提高系統(tǒng)輸出波形的穩(wěn)定性和供電質(zhì)量。而電壓外環(huán)控制的作用是使系統(tǒng)輸出波形能夠瞬時跟蹤給定值。目前,基于大多數(shù)逆變系統(tǒng)中常用的雙閉環(huán)控制的電流內(nèi)環(huán)控制策略是以輸出端的濾波電感電流為內(nèi)環(huán)控制或者以濾波電容電流為內(nèi)環(huán)進行控制。其中,采用濾波電容電流作為內(nèi)環(huán)進行控制時,由于電容電流能夠被瞬時控制,使得輸出電壓因為電容電流的微分環(huán)節(jié)得到矯正,因此,該系統(tǒng)的帶負載能力更強,本文將采用電容電流為內(nèi)環(huán)進行分析,如圖4 所示為電容電流為內(nèi)環(huán)的控制框圖。
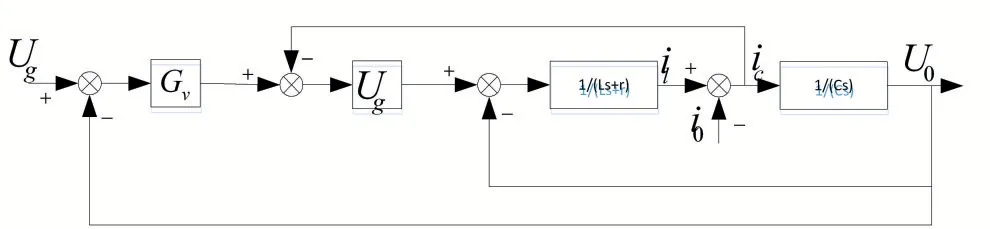
圖4 電容電流內(nèi)環(huán)電壓外環(huán)控制框圖
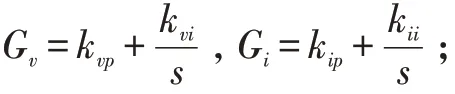
根據(jù)自動控制理論,可以采用極點配置法計算PI控制器的比例和積分控制參數(shù),因為采用極點配置法時,比例和積分控制參數(shù)與閉環(huán)控制系統(tǒng)性能指標能建立量化關(guān)系,使得參數(shù)計算更加準確。圖4 中控制器的Gv與Gi分別定義為:
由圖4 可以推出逆變器的閉環(huán)系統(tǒng)特征方程:

從上式可以看出此系統(tǒng)是一個四階系統(tǒng),特征方程有四個根也就是說有四個閉環(huán)極點。使用伯德圖法、根軌跡法等一般方法設(shè)計雙閉環(huán)控制器時需要考慮調(diào)節(jié)器之間的響應(yīng)速度、頻帶寬度等多方面因素的互相影響,控制器設(shè)計步驟復雜,人工計算量大,而且還需反復湊驗;使用極點配置法不僅簡化設(shè)計過程還可減少人工計算量,而且所設(shè)計的參數(shù)能滿足系統(tǒng)高性能指標要求。
則由期望的主導極點與非主導極點所得閉環(huán)方程為:

對比式(7)和式(8),令對應(yīng)系數(shù)相等,可得:
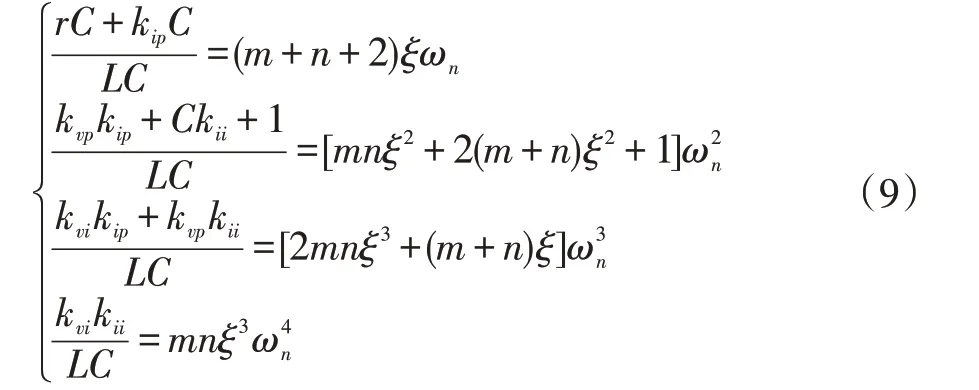
為使得計算方便,現(xiàn)令:

聯(lián)立上式可求得:

其中,根據(jù)kip的值可以求出式(10)的解,而kii即為該式的正實數(shù)根。
3 三相逆變器的仿真
根據(jù)上述分析,對三相逆變器的數(shù)學建模以及控制策略進行計算,利用MATLAB/Simulink 仿真平臺搭建逆變系統(tǒng)的仿真模型,對三相逆變器進行仿真,驗證控制策略的可行性與有效性。
3.1 濾波器參數(shù)設(shè)計
本文所設(shè)計的逆變器是通過以SVPWM 為控制信號來控制開關(guān)器件的通斷將直流輸入電壓轉(zhuǎn)換為正弦波等效的波形輸出,所以輸出電壓中包含有較多的高次諧波。為了使逆變器帶上負載后輸出能得到平滑的、波形質(zhì)量好的輸出電壓,因此必須在負載前端加低通濾波器以消除高次諧波分量,通常釆用LC 濾波器。
根據(jù)工程實踐,濾波器自身電感與電容的計算公式如下:
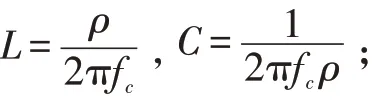
其中fc為濾波器的截止頻率,一般取為逆變器開關(guān)頻率的0.04-0.1 倍,ρ 為逆變器自身等效阻抗,一般取額定負載的0.4-0.8 倍。
綜合考慮整個逆變器的諧波輸出大小、控制算法及電感壓降等因素,通過計算,選取濾波器的電感值為2mH,濾波器的電容值為6 μF。三相逆變器的阻尼比c為ξ=,諧振頻率為ωn=所以,控制器參數(shù)可以計算得出:電壓環(huán)控制器參數(shù):kvp=2.64e-3,kvi=1431;電流環(huán)控制器參數(shù):kip=5.896,kii=356.394。
3.2 Simulink仿真分析
根據(jù)前面所給的系統(tǒng)參數(shù),搭建仿真模型,對三相逆變器在不同工況下進行仿真。仿真結(jié)果如下。
(1)額定負載:Ra=Rb=Rc=6Ω,仿真結(jié)果如圖5所示,由波形圖可以看出,所搭建的電壓電流雙閉環(huán)系統(tǒng)模型有較好的輸出波形質(zhì)量。
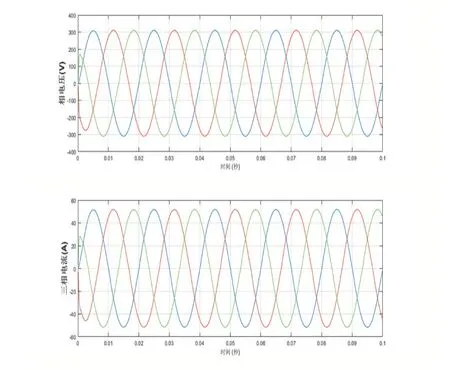
圖5 閉環(huán)穩(wěn)定工況時,輸出電壓和電流波形
(2)負載突變:在0.05s 時設(shè)置使得負載發(fā)生突變,此時Ra=Rb=Rc=3Ω,仿真結(jié)果如圖6 所示,該逆變系統(tǒng)的輸出電壓電流波形在0.05s 負載發(fā)生突變時,電壓電流均有輕微波動,但是在極短的時間內(nèi)即可恢復穩(wěn)定。
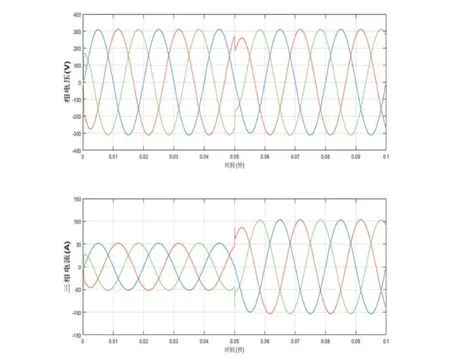
圖6 閉環(huán)負載突變時,輸出電壓和電流波形
(3)直流電壓源突變:在0.05s 時設(shè)置使得直流源發(fā)生突變,如圖7 所示,其中(a)圖為直流源從1500V瞬間增加到1800V 時的波形,(b)圖為直流源從1500V瞬間減小到1200V 時的波形,從仿真結(jié)果來看,輸出電壓均能在極短的時間內(nèi)回復到正常水平。
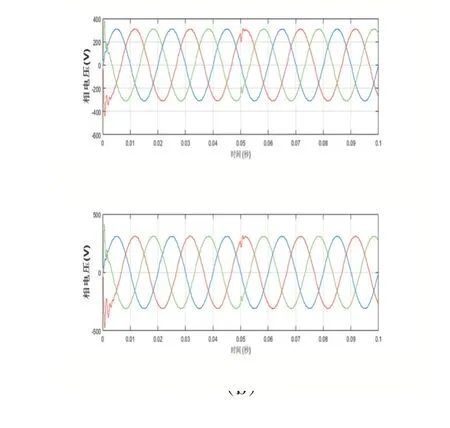
圖7 閉環(huán)直流電壓源突然增大和減小時,輸出電壓波形
經(jīng)過上述波形圖分析可知,采用以電容電流為內(nèi)環(huán)的雙閉環(huán)為控制策略之后,無論是負載發(fā)生突變或者是直流源發(fā)生突變的情況,輸出波形均能在很短的時間穩(wěn)定下來,說明該系統(tǒng)是穩(wěn)定的。
4 結(jié)語
本文主要研究了三相逆變系統(tǒng)的閉環(huán)控制系統(tǒng)。著重的研究逆變器在靜止和旋轉(zhuǎn)坐標系下的數(shù)學模型,推導傳遞函數(shù)計算系統(tǒng)穩(wěn)定性。最后在前文理論分析的基礎(chǔ)上,基于仿真工具MATLAB/Simulink 搭建輔助逆變器系統(tǒng)實驗平臺。對文中提出的逆變器電壓控制方法進行負載投切實驗、直流源突變的仿真實驗,結(jié)果完全符合設(shè)計要求。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32