無人機分布式干擾對艦載雷達的壓制效能分析?
2019-11-13 08:22:00楊立永
艦船電子工程 2019年10期
楊立永
(中國人民解放軍91336部隊 秦皇島 066000)
1 引言
電子戰無人機已經成為今天能夠完成偵察、監視、目標指示、戰損評估的作戰平臺。在近幾年爆發的幾場典型高技術局部戰爭中,電子戰無人機均發揮了重要作用。電子戰無人機在信息化戰爭中具有重要的應用價值。無人機可用作電子干擾平臺、裝備雷達和通信對抗等電子干擾設備、直接飛抵敵艦艇編隊上空執行干擾、壓制任務,也可以用無人機直接投放無源干擾物(如箔條)或投擲式有源干擾機對敵方實施干擾、支援各種攻擊機和轟炸機作戰。本文主要對電子干擾無人機對艦載雷達實施分布式干擾的作戰效能進行分析評估[3~5]。
2 無人機分布式干擾的優點
相比傳統支援干擾模式,電子戰無人機分布式干擾具有距離近、有效干擾扇面廣、信號形式靈活、壓制區域大等多優點[1]。傳統支援干擾的電子戰飛機由于其雷達反射截面積大、作戰高度高、實施干擾距離遠,容易被其他信息支援系統發現,容易被攻擊。單部無人機實施干擾很難發揮無人機實施干擾的靈活性優勢,難以達到預期干擾效果,容易被敵方雷達操作手發現,而無人機分布式干擾,因其干擾源數量較多,分布方式較為靈活,實施戰法多樣,加之雷達反射截面積較小,隱蔽性較高,不容易被發現。
電子戰無人機分布式干擾最顯著的優點是實施干擾時燒穿距離較近,又可深入抵近敵方雷達陣地,無人機成本較低,可裝備數量很多,干擾信號很容易從雷達主瓣進入,有效解決了雷達實施副瓣對消、副瓣匿影等反干擾措施[2]。
在掩護目標作戰過程中,無人機分布式干擾還可以采取較為多樣的作戰模式,干擾位置選定靈活,可以長時間巡航在敵方陣地周圍實施不間斷干擾壓制,效費比較高,是一種非常有潛力的電子對抗方式[11]。
3 分布式干擾下艦載雷達探測性能模型分析
3.1 無干擾下雷達探測距離計算
雷達最大探測距離是衡量雷達探測能力的重要效能指標,通常表征為在確定的觀測環境及規定的虛警概率和發現概率條件下雷達在天線波束最大增益方向上探測目標的距離,其大小主要取決于雷達向空間發射的射頻能量、雷達接收機的靈敏度、雷達天線有效面積和目標的雷達截面積等。下面給出正常工作情況下的雷達探測距離計算模型。
假設艦載雷達發射天線與接收天線為同一天線,雷達發射功率為Pt,雷達收發天線增益為Gt,目標有效反射面積為σ ,雷達最大探測距離為Rmax,雷達波長為λ ,雷達最小檢測信噪比為SN.min。只有雷達接收機輸入端接收到的目標信號功率超過雷達最小可檢測功率時,雷達才能夠有效發現目標。超過這個距離,接收信號功率會進一步減小,目標檢測概率會下降。雷達的最大探測距離可表示為[8]

式中,Kb為波爾茲曼常數,取1.38×10-23J/K ,T0是以絕對溫度表示的接收機噪聲溫度,取T0=290°K 時,KbT0=4×10-21W/Hz,Δfr為雷達接收機帶寬(Hz),Fn為噪聲系數(dB),L 為系統損耗因子(dB)。
把SN?min定義為雷達發現概率等于0.9 時雷達接收機端內的功率信噪比,當虛警概率Pf=10-6時,由公式,可以算出

式中,n是一次掃描中的雷達視頻脈沖積累數,有

其中,θα為雷達水平波瓣寬度,fr為雷達脈沖重復頻率(Hz),Ω 為雷達天線掃描角速度。
3.2 干擾條件下雷達探測距離計算
雷達接收的目標反射回波隨距離的變化而改變,這種變化關系可以用雷達方程來估算[6,12]:
式中,Pt為雷達發射功率(W),Gt為雷達發射天線增益(dB),Gr為雷達發射天線增益(dB),λ 為雷達發射信號波長(m),σ 為目標有效反射面積(m2),Lt為雷達系統損耗因子(dB),同一雷達的接收天線和發射天線共用一個,即Gt=Gr。則雷達接收到目標的回波功率為

雷達接收到干擾機輻射的功率為

式中,Pj為干擾機發射功率(W),Gj為雷達發射天線增益(dB),Lj為干擾機系統損耗因子(dB),γj為極化損耗因子(dB),Δfj為干擾機頻譜寬度(Hz),Δfr為雷達接收機帶寬(Hz),Rj為干擾機與雷達之間的距離(m),Gt( θ )為干擾機所對準的雷達天線副瓣增益(dB)。
根據干擾壓制系數的定義:雷達接收到干擾信號的功率和雷達接收到回波信號的功率,在雷達接收機輸入端的比值[7],即

將式(5)、式(6)分別代入式(7)得

由上式可得,雷達受干擾后的探測距離為

雷達的系統損耗、干擾機的衰減不考慮,壓制系數Kjt定為當虛警概率為10-6,探測概率為0.1 的雷達接收干擾信號功率與回波信號的比值。
3.3 天線方向圖計算
針狀波束的方位維波束和俯仰維波束具有同樣的形狀,一般采用髙斯平方或者辛克函數,髙斯近似的單方向電壓增益函數為[6]

辛克函數近似的單方向電壓增益函數為

其中θ0.5是主瓣的半功率波束寬度。單方向電壓增益函數與功率增益函數的關系是

單方向增益函數應用于僅發射或者僅接收的情況。當收發共用一個天線,且同時考慮收發功能時,雙向天線電壓增益為

在仿真過程中,采用辛克函數作為雷達和干擾機的方位天線方向圖。
3.4 約束性條件
雷達在進行目標探測時,受到大氣衰減、地球曲率、電波折射或海雜波的影響,這些因素很大程度影響雷達的探測效能,文中選取了地球曲率作為約束性條件。
由于雷達一般工作在微波頻段上,電波近似直線傳播,故地球表面的彎曲會使雷達對目標的直視距離受到限制。雷達受地球曲率影響的直視距離為

式中,Rs為直視距離(km),Ha為雷達標高+天線高度(m),Ht為目標高度(m)。
綜合上面作用距離計算公式可知,無干擾條件下對空警戒雷達對截面積為σ 的目標的實際探測距離是

4 仿真分析
根據上述理論分析可以看出,雷達在主瓣方向上的最大探測距離與雷達自身的性能、干擾機的干擾距離、干擾機的干擾效能和雷達的內部噪聲有關,在干擾情況下將雷達主瓣旋轉360°,再把每個方位的雷達最大探測點位置連接起來得出雷達最大探測范圍。
為確定單架無人機和多架無人機干擾雷達情況下的干擾效果和暴露區,假設雷達的發射功率110kW,天線增益選擇35dB,發射頻率為3GHz,掩護目標的雷達發射截面積為10m2,接收機帶寬為2MHz,不考慮電磁波的傳播損耗和系統損耗。電子戰無人機的干擾設備干擾功率為200W,考慮無人機在執行戰術動作過程中,干擾波束指向偏離雷達一定的角度,假設天線增益為15dB,干擾帶寬為50MHz,極化損耗為0.5。
4.1 單架電子戰無人機實施干擾仿真分析
4.1.1 無人機與雷達相對位置關系
如圖1 所示,攻擊機群高度為Ht,距敵雷達之間的斜距為Rt;電子戰無人機的高度為Hj,距敵雷達之間的斜距為Rj;攻擊機群與電子戰無人機到敵雷達之間的水平夾角為θ ,仰角分別為φt,φj。[9]如圖所示雷達天線主瓣指向目標,而當無人干擾機以天線主瓣指向雷達,干擾能量大部分將由雷達副瓣進入雷達。
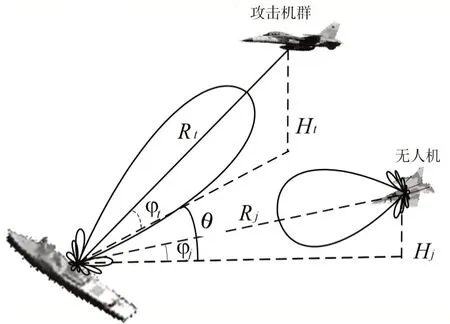
圖1 單架無人機干擾示意圖
4.1.2 仿真結果
無人機在距離雷達50km 處實施干擾,仿真結果如圖2 所示,綠色虛線部分為實施干擾前雷達對掩護目標的最大探測距離,紅色實線為無人機實施干擾后雷達對掩護目標的探測區域。由圖中可以看出除無人機干擾方向外雷達的探測距離由125km 減少到75km,基本難以滿足對攻擊機的掩護任務,如果艦載雷達實施副瓣抗干擾等措施,由副瓣方向進入的干擾能量將大大減少,干擾效果主要體現在主瓣方向。由此可見單架電子戰無人機實施支援干擾效果有限,由于無人機載荷的限制增大發射功率難以實現,考慮采用多架無人機實施分布式干擾。

圖2 單架無人機對敵雷達干擾效果
4.2 電子戰無人機實施分布式干擾仿真分析
4.2.1 無人機與雷達相對位置
由于新型艦載雷達的工作體制和抗干擾技術不斷發展,使得單架電子戰無人機干擾雷達形成的有效壓制區域逐漸減小。在戰術應用多采用多架無人機實施分布式干擾,載有電子干擾系統的無人機,按程序進入指定空域,在距離被攻擊目標50 km~60km 的半徑上圍繞該目標作圓周飛行,以此來掩護攻擊編隊的突擊[10]。

圖3 無人機實施分布式干擾示意圖
4.2.2 仿真結果
實施分布式干擾采用7 架無人機,在極坐標系中,設艦載雷達坐標為(0°,0km),假設7 架無人機搭載的干擾設備參數相同,坐標分別為(345°,50km)、(15°,60km)、(45°,50km)、(75°,60km)、(105°,50km)、(135°,60km)、(165°,50km),仿真結果如圖4所示。

圖4 七架無人機對敵雷達干擾效果
從上圖可以看出,采用7 架電子戰無人機實施分布式干擾,雷達對掩護目標群的最大探測距離由125km 減小到50km,多架干擾機對減小雷達最大探測距離的貢獻不明顯,當雷達采用副瓣抑制抗干擾措施時,即便將副瓣進入的干擾能量大大衰減,多架無人機的主瓣干擾效果仍然很明顯,達到了對攻擊機群的掩護目的。
5 結語
通過對單架和多架電子戰無人機實施壓制干擾進行建模分析,得出在電子戰無人機實施壓制干擾時,采用多架無人機實施分布式干擾戰術效果明顯。在圖4 中,兩架無人機之間的間距的采取上應當保證主瓣干擾無縫對接,建議在方位上根據敵方雷達的情報參數間隔布放,以增加壓制干擾時的干擾扇面,分布式輻射信號可從雷達天線主瓣進入,信號不會受到低副瓣天線、副瓣匿影或副瓣對消的抑制,因而其干擾效率可比副瓣干擾機高。
