吸附式自動擦黑板機器人的設計與應用
2019-11-14 08:17:47申鵬王麒宣褚昊霖何敬聰毛旭東
軟件 2019年9期
關鍵詞:設計
申鵬 王麒宣 褚昊霖 何敬聰 毛旭東
摘 ?要: 為了更加環(huán)保、高效地清掃黑板上的字跡,保障老師和學生的身體健康,設計一種吸附式自動擦黑板機器人,該機器以STM32為核心,多種傳感器協(xié)同工作,使得機器具有清掃、吸附、移動等功能,可以自動或手動清掃黑板上的字跡,清掃完成后返回固定起始位置。實際運行結果表明,該機器可以正常運行,并且高效地完成對黑板字跡的清掃,同時收集粉塵。
關鍵詞:機器人;STM32;傳感器;吸附
中圖分類號: TP249????文獻標識碼:?A????DOI:10.3969/j.issn.1003-6970.2019.09.028
本文著錄格式:申鵬,王麒宣,褚昊霖,等. 吸附式自動擦黑板機器人的設計與應用[J]. 軟件,2019,40(9):120-123
Design and Application of Adsorptive Automatic Blackboard Cleaning Robot
SHEN?Peng1, WANG Qi-xuan2, CHU Hao-lin1?, HE Jing-cong1?, MAO Xu-dong2
(1. Harbin University Of Commerce of Computer and Information Engineering, Harbin, HeiLongJiang, 150000, China)
【Abstract】: Nowadays black boards are widely used in almost every educational institute.?They are large in size,?for that reason it is very time consuming process to erase the writings from the board with duster.?Using duster also reduce the visual quality of the board. Considering this “adsorptive automatic blackboard cleaning robot”, an automatic system can solve these problems. Our system consists of a set of sensors and STM32,?as the core,?in order to achieve this mechanism.?The robot has horizontal movements?and it cleans the blackboards while absorbing the dust. It is possible to control the robot by a remote control system or by a hand. The actual experience results show that the robot can work efficiently on cleaning?the blackboard handwriting,?and collecting dust.
【Key words】:?Robot; STM32; Sensors;?Adsorptive
0??引言
當今教學,雖然多媒體技術廣泛使用,但是教師使用粉筆板書依然是主流。傳統(tǒng)的黑板擦,體積小巧,成本低,但其結構簡單,功能單一。在擦拭黑板的過程中,費時費力,而且容易產生大量粉塵,被師生吸入體內,會對身體健康造成危害,這無疑是廣大師生日常面對的健康殺手[1]。為了解決上述問題,本文基于STM32設計一種吸附式自動擦黑板機器人,可將其吸附在黑板上,機器人會按設定的路線移動清掃黑板上的字跡,并將粉塵吸進儲塵盒中,比傳統(tǒng)擦拭方法更加有效,擦拭效率和效果顯著提高,從而提高課堂效率和保證師生健康[2]。
1??總設計思路
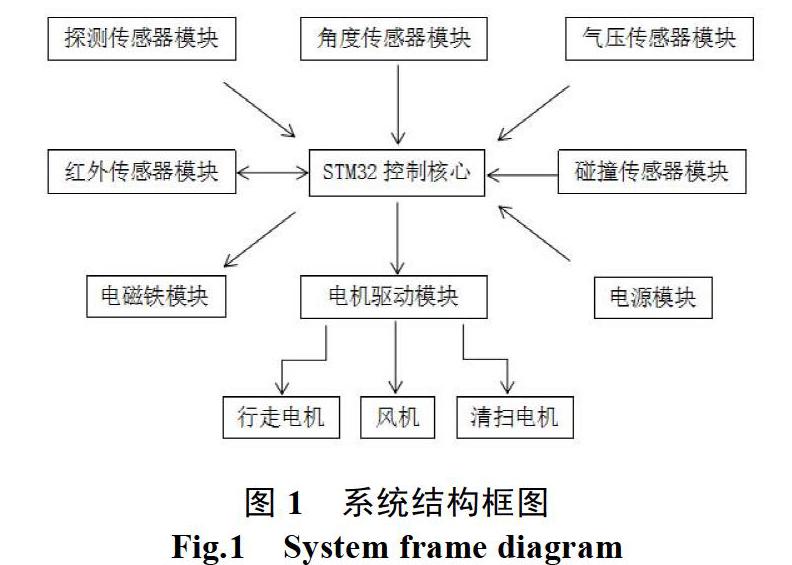
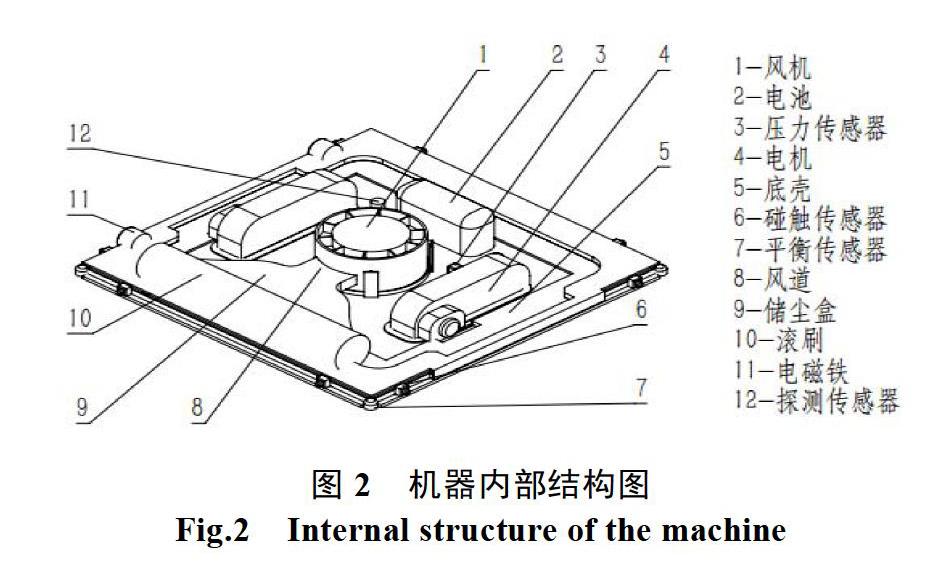
總體設計框圖如圖1所示,采用STM32作為主控芯片,由電機驅動、探測傳感器等八個模塊組成。使用者首先要將黑板的尺寸通過遙控器告知給機器,機器會根據輸入尺寸計算要行走行數和行移動距離,然后按‘S型軌跡移動[3]。如圖2所示,機器內部的滾刷會將沿途的字跡清掃下來,風機將粉塵吸入儲塵盒。使用者可以通過紅外遙控器手動控制機器去指定位置清掃。黑板右上角會安裝鐵質擋板
以及充電器,機器清掃完畢后會返回起始位置,通過電磁鐵模塊磁力吸附在鐵質擋板,以達到停機固定的效果[4]。
2??系統(tǒng)硬件電路設計
2.1探測傳感器模塊的設計
探測傳感器由一對紅外線發(fā)射與接收管組成,發(fā)射管對黑板表面發(fā)射紅外線,接收管負責接收,當發(fā)射出的紅外線沒有被反射回來或反射回來強度不夠大時,探測模塊輸出端對應輸出不同的電壓值,由此判斷黑板上是否有字跡。
2.2角度傳感器模塊的設計
角度傳感器模塊由LM393雙電壓比較器和N1000060單軸角度傳感器組成,該模塊測量的角度范圍為0°到180°,對應正比輸出0.5?V到4.5?V電壓值,可通過模數轉換器進行采集,由此判斷機體當前是否水平移動。當機器需要轉彎時,控制兩個行走電機正反轉,采集機體當前的角度,使機體準確的進行‘U型轉彎。兩個電位器可以調節(jié)測量角度范圍,調整精度為±1°。
2.3氣壓傳感器模塊的設計
氣壓傳感器模塊由惠斯通電橋傳感器和調理芯片構成,模塊內含差分放大、自動校準、溫度補償等電路,可直接測量-5?kPa到0的壓強,對應正比輸出0.5?V到4.5?V電壓值,可通過模數轉換器進行采集,只有當機器內部負壓到達完全吸附的閾值時,機器方可脫離固定的電磁鐵。
2.4碰撞傳感器模塊的設計
機器四周裝有八個碰撞傳感器。當機器到達黑板邊緣時,機器外殼上的碰撞傳感器會被按壓,并發(fā)出信號給總控制芯片,總控制芯片這時會控制機器后退進行U型轉彎動作。
2.5電機驅動模塊設計
電機驅動模塊由A4950驅動芯片、穩(wěn)壓器和光電隔離器構成,可控制電機正反轉,使得機器完成轉彎動作,此模塊自帶限流保護功能,過流時不會斷電,但會限制最大輸出電流。主控芯片IO口與IN1,IN2連接,可通過設置PWM占空比,改變了電機輸出扭矩的大小,由此來調節(jié)行走電機的速度。
3??軟件設計
在Keil環(huán)境下,使用C語言編寫控制程序,程序流程圖如圖6所示。擦黑板機器人自我保護的
優(yōu)先級最高,自我保護步驟為:當機器清掃到黑板邊緣處產生碰撞時,總控芯片會控制電機,使其到達安全區(qū)域繼續(xù)清掃,同時氣壓傳感器采集機器吸附狀態(tài),對應地調節(jié)風機轉速。探測傳感器,碰撞傳感器連接在STM32的中斷引腳上,碰撞傳感器的中斷優(yōu)先級最高。角度和電壓傳感器則接在STM32內置的模數轉換器管腳,調用1?ms定時器中斷服務,對模擬量進行采集。電機和風機調速則通過調用定時器改變PWM占空比來實現(xiàn)[5]。
軟件系統(tǒng)首先對各模塊進行初始化。包括ADC、PWM和I/O口的設置等。初始化完成后,讀取人機交互模塊的參數,包括開關狀態(tài)及紅外遙控傳回的數據。然后開始進入無限循環(huán),讀取各傳感器模塊傳輸的數據,控制電機和風機工作[6]。
4??分析與測試
機器人靜止貼附在黑板表面時,主要受到負壓吸附力、重力和靜摩擦力作用,其中靜摩擦力來自履帶和清潔裝置對玻璃表面的相互作用。假設忽略受壓后履帶和海綿的回彈,機器人驅動結構的履帶輪與黑板表面剛性接觸,清潔裝置壓縮后使之與機器人底盤成為剛性連接,即黑板對清潔裝置的支持力會通過清潔裝置傳遞到機器人本體,機器人在靜止狀態(tài)下的受力如圖7所示。
其中固定坐標系為{![]() }、機器坐標系為{
}、機器坐標系為{![]() },
},![]() 、
、![]() 、
、![]() 。
。![]() 是機器人清潔裝置和黑板表面的靜摩擦系數,
是機器人清潔裝置和黑板表面的靜摩擦系數,![]() ,
,![]() 是機器人履帶輪和黑板表面的靜摩擦系數,
是機器人履帶輪和黑板表面的靜摩擦系數,![]() 如圖所示是機器所在坐標系
如圖所示是機器所在坐標系![]() 軸與固定坐標系軸
軸與固定坐標系軸![]() 的夾角。
的夾角。
聯(lián)立(1)(2)(3)可以算出在靜止狀態(tài)機械所受的臨界壓力![]() 。通過
。通過![]() 算的臨界壓強
算的臨界壓強![]() [7]。經過理論計算和反復實驗,如圖8所示,最終確定機器吸附壓強閾值約為-2.8?Kpa。傳感器輸出電壓為2.26?V。當機器內部壓強高于-2.8?kpa時,機器才解開電磁鐵在黑板上移動,在移動過程中,當機器內部壓強低于-2.8?kpa時,機器蜂鳴器報警,并驅動風機提高轉速。
[7]。經過理論計算和反復實驗,如圖8所示,最終確定機器吸附壓強閾值約為-2.8?Kpa。傳感器輸出電壓為2.26?V。當機器內部壓強高于-2.8?kpa時,機器才解開電磁鐵在黑板上移動,在移動過程中,當機器內部壓強低于-2.8?kpa時,機器蜂鳴器報警,并驅動風機提高轉速。
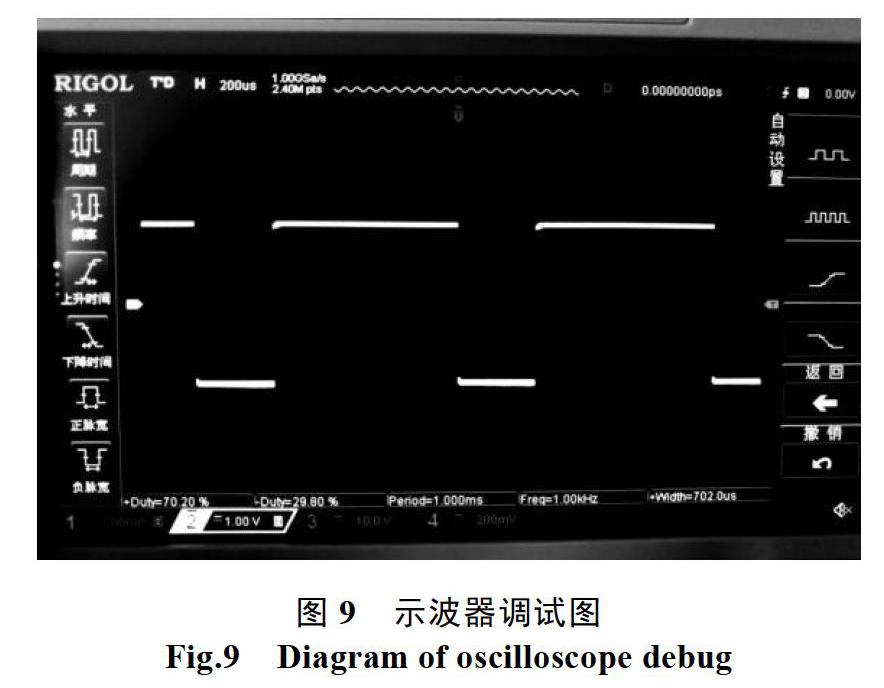
為了驗證設計的電路是否正確,使用示波器對電機驅動模塊PWM進行測量,如圖10所示,占空比為70%,測試結果完全正確。
5??結語
本文基于STM32設計的吸附式自動擦黑板機器人,基本完成了系統(tǒng)預期設定的功能,可以在黑板上完成自動清掃的工作,有效地減少了老師和學生對粉塵的吸入。[8]但是由于機器重量和體積的限制,在路徑規(guī)劃方面還存在一定局限性,而且在邊角位置清掃的效果不是很理想,所以還需進行更多的測試和改進,提高算法,不斷積累經驗,以完成機器所有的預期功能。
參考文獻
- 李國基. 智能電磁擦黑板機器人的研制[J]. 中國教育技術裝備, 2018(01): 42-45+48.
- 周雨松, 熊田忠. 多傳感器協(xié)同的擦黑板機器人系統(tǒng)研制[J]. 自動化儀表, 2018, 39(11): 42-47+51.
- 韓云飛. 玻璃幕墻清洗機器人的設計與研究[D]. 青島科技大學, 2018.
- 高正中, 龔群英, 宋森森. 基于STM32的智能平衡車控制系統(tǒng)設計[J]. 現(xiàn)代電子技術, 2016, 39(14): 46-48.
- 周繼裕, 張坤忠, 許雪威, 馮仲明. 基于PID算法和STM32的分揀搬運機器人的設計[J]. 儀表技術與傳感器, 2017(04): 122-126.
- 羅劉敏, 王明霞, 郭艷花, 劉曉青. 基于單片機的智能小車控制系統(tǒng)設計[J]. 儀表技術與傳感器, 2018(01): 123-?126.
- 孫立新, 徐良君, 張明路, 徐子寒, 董鵬, 賈計東. 擦玻璃機器人負壓吸附特性研究[J]. 真空科學與技術學報, 2017, 37(04): 357-362.
- 黃藍青, 張晨雷. 粉筆灰對于身體的危害及解決方法[J]. 清洗世界, 2019, 35(01): 50-51.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04