語音控制機械手臂的設計與實現
2019-11-15 10:24:04徐松海周夢婷何英昊辜錚單世民
電子技術與軟件工程 2019年19期
文/徐松海 周夢婷 何英昊 辜錚 單世民
1 引言
社會的進步離不開科技的發展,而近年來智能機器方面因為其可用范圍寬廣,可操控性強,經濟實惠效益大而備受關注,也使各大高校組織,科研機構或企業主動投入大量的人才與資金進行大力研發。而在各類智能機器人的研發中,智能機械手臂的開發使用獨樹一幟,機械手臂能夠不考慮疲倦與危險,直接提高工作效率,減少工傷事故,同時具有維修方便,可控性強等特點。
本設計采用STC15單片機作為控制平臺,擁有七自由度機械手控制系統,可以進行調試與儲存的功能,同時添加的語音控制模塊也使該設計具有人機對話功能和語音控制信號的功能。整個系統設計靈活智能,可控性強,對于機器人的研究教學或者工業開發模型方面提供一個實驗系統,具有很強的研發意義。
2 系統硬設計
2.1 器件選擇
2.1.1 系統核心處理器
目前在應用機械臂的微控制器有很多種,而在其中使用較為廣泛的是STM32單片機和STC15單片機,但由于STM32單片機的結構更為復雜,編程麻煩,很多的模塊并不能被運用上,同時價格也比較貴一些,所以該系統核心控制處理器采用STC15W4K32S4系列單片機作為處理器。該處理器的配置強大屬于增強型 8051 CPU,除去兼容傳統的8051指令代碼,也具有基礎的1T、機器周期,可擦寫次數10萬次以上的Flash程序存儲器等等,四組完全獨立的高速異步串行通信端口:串口1、2、3、4;一組SPI低功耗設計為:低速模式,空閑模式,掉電模式;通用I/O口設置成:準雙向口/弱上拉模式,強推挽/強上拉模式,僅為輸入/高阻模式,開漏模式。
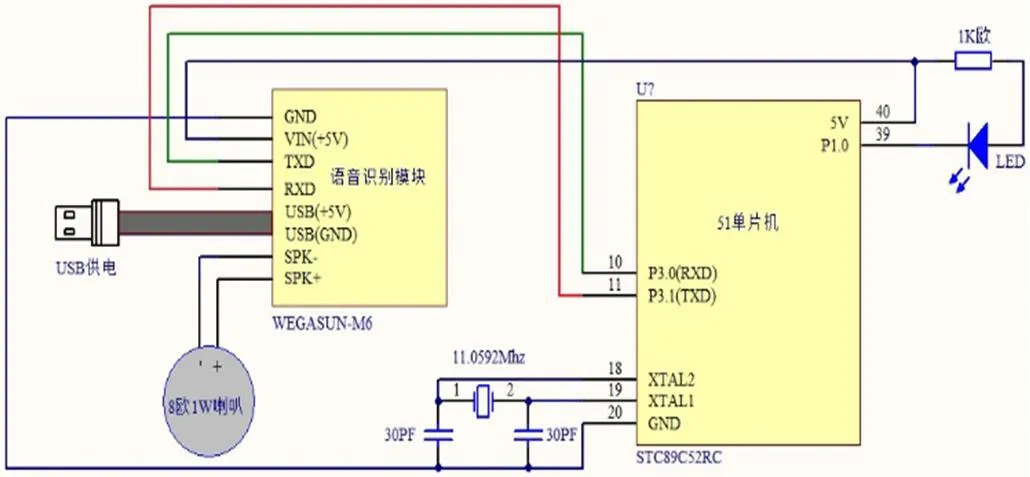
圖1:WEGASUN-M6語音識別模塊原理圖

圖2:系統硬件總體設計框圖
2.1.2 舵機控制電路
系統七自由度機械手臂控制電路采用6通道15位專門的高精度PWM+2通道CCP來控制;8路PWM可以控制8個伺服舵機進行協調動作,通過合適的動作行為能同時實現控制位置和速度,除此外還能進行時間延時斷點以便發送指令功能。
2.1.3 語音控制電路
該系統語音識別模塊選擇采用市面上WEGASUN-M6語音識別模塊,該模塊具有經濟實惠使用相對簡單等特點。使用時只需要通過使用上位機軟件即可發送特定的指令,從而能夠直接去設定用戶需要識別的關鍵詞,避免了需要事先對用戶的訓練或者錄音的麻煩,從總體看該語音識別控制模塊,是非常高效經濟的。其原理圖如圖1所示。
2.2 總體設計框圖
系統硬件總體設計框圖如圖 2所示。
系統可通過WEGASUN-M6語音識別指定的語音指令,通過語音控制電路中的UART1接口將命令標識發送給MCU,系統核心處理器STC15單片機能通過Keil C開發環境去執行機械手臂動作的調試與儲存,MCU可預先將命令與對應的動作一一調試出來并儲存,等接受到語音命令后讀出相應的語音指令集,從而使舵機控制電路產生PWM波形進而控制七自由度機械手臂,使其能夠完成對應的語音指令動作,實現語音識別控制機械手的實驗目的。
2.3 系統硬件設計與原理圖
該系統以STC15W4K32S4作為控制平臺,主要分兩方面來實現語音控制機械手臂的系統功能。
(1)其控制平臺可與其外圍電路的接口設計電路,這部分由三部分構成,分別是:MCU與語音識別模塊的UART接口電路和MCU與舵機控制電路的接口及舵機控制電路與舵機的連接電路。
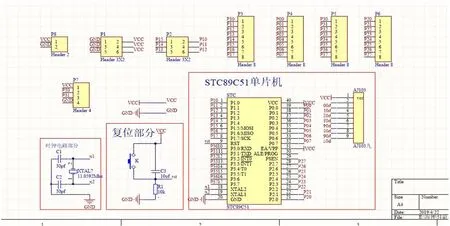
圖3:系統硬件原理設計圖
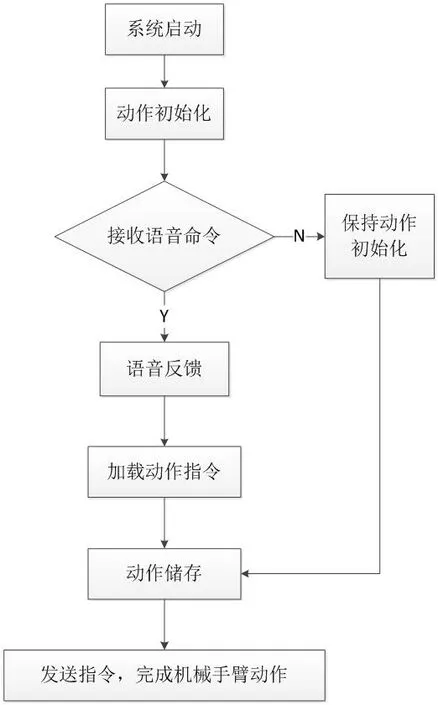
圖4:系統軟件整體設計流程圖
(2)控制平臺接收語音控制指令后,采用并行口對舵機電路發送控制指令,語音實現人機交互,MCU存儲加載動作,最終完成整個系統功能。系統原理圖如圖3所示。
3 系統軟件設計
系統軟件設計步驟主要分為以下幾個部分:
(1)啟動系統后進行機械手動作初始化;
(2)動作初始化完成后,存儲初始化動作;
(3)識別接收語音控制命令;
(4)加載命令對應的動作指令序列;
(5)發送其指令序列到舵機控制電路;
(6)完成指令序列對應動作。
系統軟件整體設計流程如圖4所示。
4 系統測試及其誤差率
語音識別模塊測試時先設置詞條和反饋語文本,詞條:@WriteKeywords#開燈001|關燈 002|$;反饋語文本:@WriteFlashText#|001馬上開燈|002 馬上關燈$,然后將模塊識別模式設置為“對話模式”,發送指令@AsrMode#1$ ,設置模塊“返回值輸出格式”為“單字節輸出”模式。當用戶喊“開燈”時,回答“馬上開燈”,LED亮起;當用戶喊“關燈”,回答“馬上關燈”,LED熄滅。
當語音模塊成功測試連接后開始測試實驗,設置“拿起”“放下”為語音指令,在進行二十五次檢測中失誤兩次,成功二十三次。成功率達到百分之九十二。
5 結論
本設計主控芯片選取STC15MCU為主控芯片,由其控制七自由度手臂完成簡單的動作和抓取任務,再結合舵機控制電路和語音識別模塊,機械手臂可以向上,向下,左轉,右轉,伸手,合手等動作;能準確的接收到使用者的指令,將一個物體抓取起來,并遞給使用者。關于機械手臂在智能機器人與工業型機器人的教學研究和應用領域方面發展越來越廣泛,必將在不久的將來擁有一席之地,而該系統可以對現在的教學研究和工業生產方向當做教學模型,擁有非常好的實際作用。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
