一種轉臺伺服系統干擾補償控制方法研究
2019-11-15 02:19:22趙回王雪梅許哲楊柱吳桐王健永
中國測試 2019年3期
趙回 王雪梅 許哲 楊柱 吳桐 王健永


摘要:為提高轉臺伺服系統的低速跟蹤性能,提出一種結合LuGre摩擦模型和非線性干擾觀測器(NDO)補償非線性干擾的方法。使用LuGre摩擦模型補償系統的摩擦干擾力矩,建立NDO模型消除系統建模不精確及其他未知干擾的影響,并采用反演法設計系統的自適應滑模控制律。通過仿真表明,基于LuGre+NDO模型自適應滑模控制能有效消除轉臺的低速“爬行”現象,位置穩態誤差達到2×10–5rad,速度穩態誤差達到1.5×10–3rad/s。且通過與傳統控制方法結果對比,證明所提出的方法具有較好的控制性能和干擾抑制特性,提高伺服系統的跟蹤性能。
關鍵詞:轉臺伺服系統;LuGre摩擦模型;非線性干擾觀測器;自適應滑模控制
中圖分類號:TP273
文獻標志碼:A
文章編號:1674–5124(2019)03–0139–07
Research on a method of turntable servo system disturbance compensated control
ZHAO Hui, WANG Xuemei, XU Zhe, YANG Zhu, WU Tong, WANG Jianyong (Rocket Force University of Engineering, Xian 710025, China)
Abstract: In order to improve the low-speed tracking performance of the turntable servo system, this paper proposes a method combining LuGre friction model and nonlinear disturbance observer (NDO) to compensate nonlinear interference. This paper uses LuGre friction model to compensate the frictional disturbance torque of the system and establishes NDO model to eliminate the influence of inaccurate system modeling and other unknown disturbances. And the adaptive sliding mode control law of the system is designed by using the backstepping method. The simulation results show that the adaptive sliding mode control based on LuGre+NDO model can effectively eliminate the low speed "crawling" phenomenon of the turntable. The steady state error of the position is 2×10–5 rad. The steady state error of speed is 1.5×10–3 rad/s. Compared with the traditional control method, it is proved that the proposed method has better control performance and interference suppression characteristics, and improves the tracking performance of servo system.
Keywords: the turntable servo system; LuGre friction model; nonlinear disturbance observer; adaptive sliding mode control
0 引言
仿真轉臺是飛機、導彈等飛行器進行姿態仿真的核心設備之一,高性能飛行器的研制,對仿真轉臺的靜動態性能提出了更高的要求。在轉臺伺服系統中,摩擦力矩等非線性干擾因素的存在會嚴重影響其靜動態性能,造成低速“爬行”現象[1],產生較大誤差,甚至出現極限環振蕩。因此,必須對轉臺伺服系統進行干擾補償。
目前,針對摩擦力矩的干擾,基于LuGre摩擦模型的補償技術應用十分廣泛。文獻[2]采用遺傳算法和仿真實驗對轉臺進行參數辨識,然后基于LuGre模型計算摩擦補償,提高了轉臺的控制精度,但離線辨識的方法并不能真正反映轉臺所受的實際摩擦干擾。文獻[3]采用雙觀測器實現對LuGre模型參數的自適應補償,文獻[4]采用滑模控制設計自適應補償中的虛擬控制律,都有效抑制了摩擦干擾對伺服系統的不利影響,但沒有考慮其他非線性因素所造成的干擾項。其次,在控制算法上有采用神經網絡對PID參數進行動態調整[5],或使用魯棒滑模控制[6],都實現了對轉臺的高精度控制。另一方面,仿真轉臺在實際建模中也存在非線性和不確定性及其他未知擾動,影響了系統的誤差精度。文獻[7]采用了魯棒自適應控制補償其他未知擾動力矩的影響,文獻[8]采用RBF神經網絡擬合模型不確定函數,效果顯著,但工程應用都存在一定難度。
基于現階段非線性干擾觀測器(NDO)的廣泛研究和應用[9],以及滑模控制對系統參數攝動和外部干擾具有良好的適應性和強魯棒性,本文將采用自適應滑模控制對LuGre模型參數進行在線識別,以補償摩擦力矩干擾。同時采用NDO對其他不確定干擾因素進行補償設計,最后通過仿真實驗證明所提出控制方法的有效性。
1 轉臺控制系統模型
1.1 伺服系統模型
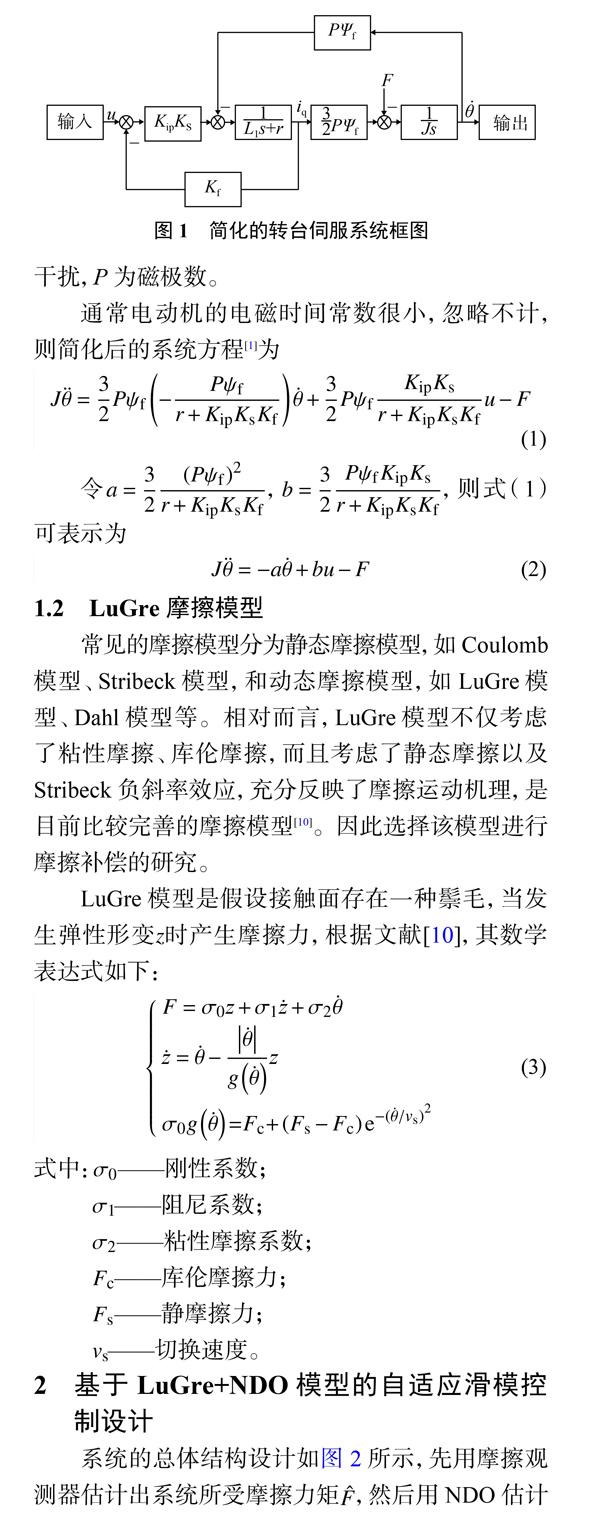
本文研究的轉臺應用于低轉速、小轉矩環境,系統采用無刷直流力矩電機驅動。根據文獻[1],考慮摩擦干擾情況下,簡化后的伺服系統框圖如圖1所示。
圖中,Kip為電流比例調節增益,Ks為逆變電路增益,Kf為電流反饋系數,ψf為永磁體基波勵磁磁場鏈過定子繞組磁鏈,J為轉子等效轉動慣量,L1為等效電感,r為電樞電阻,iq為矢量控制中的交軸電流,u為控制輸入信號,θ?為轉子角速度,F為摩擦干擾,P為磁極數。
通常電動機的電磁時間常數很小,忽略不計,則簡化后的系統方程[1]為
可表示為
1.2 LuGre摩擦模型
常見的摩擦模型分為靜態摩擦模型,如Coulomb模型、Stribeck模型,和動態摩擦模型,如LuGre模型、Dahl模型等。相對而言,LuGre模型不僅考慮了粘性摩擦、庫倫摩擦,而且考慮了靜態摩擦以及Stribeck負斜率效應,充分反映了摩擦運動機理,是目前比較完善的摩擦模型[10]。因此選擇該模型進行摩擦補償的研究。
LuGre模型是假設接觸面存在一種鬃毛,當發生彈性形變z時產生摩擦力,根據文獻[10],其數學表達式如下:
式中:σ0——剛性系數;
σ1——阻尼系數;
σ2——粘性摩擦系數;
Fc——庫倫摩擦力;
Fs——靜摩擦力;
vs——切換速度。
2 基于LuGre+NDO模型的自適應滑模控制設計
系統的總體結構設計如圖2所示,先用摩擦觀測器估計出系統所受摩擦力矩F?,然后用NDO估計出系統的未知干擾D?,經過增益調節得到補償未知干擾D的控制量ud,再通過設計自適應滑模控制得到控制量ul,兩者共同組成系統的整體控制量u,繼而達到補償所有干擾力矩的目的。
2.1 摩擦觀測器設計
在工程實際中,摩擦模型的參數會發生非一致性變化,故采用雙觀測器法[3],估計LuGre模型中的鬃毛形變量z,同時實現對動態參數σ0、σ1和σ2的在線調節。設z的兩個估計值分別為z?1、z?2,其狀態觀測方程為
其中,t1、t2為狀態觀測器的動態項。
定義狀態觀測誤差z?1=z1?z?1,z?2=z2?z?2,根據式(3)、式(4)可推得:
令σ=σ1+σ2,定義σ?0、σ?1和σ?為參數σ0、σ1和σ的估計值。將z1、z2替代式(3)中的不可測變量z,則摩擦力矩的估計值F?為:
定義參數估計誤差σ?0=σ0?σ?0、σ?1=σ1?σ?1、σ?=σ?σ?,則有:
定義摩擦誤差f=F?F?,結合式(3)、式(6)和式(7)可知:
2.2 非線性干擾觀測器設計
非線性干擾觀測器一般用來估計系統外部擾動和補償系統的不確定性。考慮系統受到建模不精確和未知波動力矩等非線性因素D的影響,根據式(2),系統方程可表示為
設計NDO對干擾D進行補償,具有如下形式[11]:
其中,p(θ,θ?)為設計的非線性函數,L為觀測器增益,且滿足:
考慮沒有干擾D和F的微分先驗知識情況下,假設相對于觀測器的動態特性,干擾的變化是緩慢的,即:
定義觀測誤差d=D?D?,結合式(10)、式(11)和式(12),可得觀測器誤差動態方程為:
設計系統控制輸入u=ul?ud,其中,ud=D?/b,則式(9)描述的系統可變為:
即采用NDO后,系統受到的非線性干擾由D變成了d,使得未知干擾減小,降低了其對系統的影響。
2.3自適應滑模控制律設計
設系統給定的位置輸入為θd,定義位置跟蹤誤差e=θd?θ,由式(14)可知:
采用動態面反演法對自適應滑模控制進行設計,步驟如下:
步驟1:定義Lyapunov函數:
其中,s為設計的滑模函數,即:
結合式(15)可推得:
設計控制律函數:
其中,h和γ均為大于零的常數。結合式(16)、式(18)和式(19)可推得:
步驟2:定義Lyapunov函數:
結合式(20)、式(21)可推得:
對d?設計控制律:
為估計出d?須得到f的值,而現實中摩擦力F無法得到,為解決這一問題,可利用摩擦觀測器的輸?出作為d?估計的輸入。根據式(12)推得:
將式(23)帶入式(22)中可得:
步驟3:定義Lyapunov函數:
對式(26)求導可得:
將式(5)、式(8)和式(25)帶入可得:
為了保證函數V?2的負定性,設計控制律如下:
將式(29)帶入式(28)中,可得:
由式(17)可知:()
因為參數h、γ、σ0、σ1、L等都為正實數,若2hk?1,則ee??hs2?0,即可保證V?3?0。通過上述對自適應滑模控制律的設計,可使得系統滿足Lyapunov穩定性條件,誤差值收斂,轉臺伺服系統趨于穩定,可實現對期望運動軌跡的精確跟蹤。
3 仿真分析
3.1 轉臺低速性能分析
利用Matlab/Simulink軟件對系統進行仿真,為分析伺服系統的低速性能,采用PID控制建立系統的仿真模型,系統所受的摩擦力矩F使用Stribeck摩擦模型[1]得到,其數學表達式如下:
其中,Fc=15N/m2,Fs=20N/m2,Kv=2N/m2,vs=0.01。查閱相關電機系統參數,取J=27.6kg?m2,a=398.4,b=3.622×103,輸入位置指令θd=0.1sint,采用PID控制的參數Kp=Kd=1,Ki=0.1,得到位置和速度的仿真曲線如圖3所示。
從仿真結果可以看出,由于摩擦力矩的存在,轉臺伺服系統會出現低速“爬行”現象,即位置跟蹤曲線有“平頂”現象,速度跟蹤曲線出現“死區”現象。因此必須對系統的摩擦干擾進行補償控制。
3.2 基于LuGre模型自適應控制分析
為消除摩擦力對伺服系統低速性能的影響,常采用基于LuGre模型的自適應補償控制,采用上文電機模型,設計誤差e1=θd?θ,e2=e?1+10e1,設計控制律:
系統所受的摩擦力矩F使用LuGre摩擦模型得到,其參數r0=r1=r=50,σ0=5,σ1=9.8,σ2=10。為研究非線性未知干擾對跟蹤精度的影響,給定未知干擾信號D=20sin(πt)+rand(),輸入指令θd=sint,采樣時間為0.1ms,分別在有無干擾D的情況下進行仿真實驗,得到仿真曲線如圖4所示。
由圖4(a)、圖4(b)可知,采用LuGre模型自適應控制可以消除伺服系統低速“爬行”現象,提高系統的跟蹤性能。對圖4(c)、圖4(d)分析可知,當系統受到非線性未知干擾時,系統的位置誤差和速度誤差都發生了較大波動,結果如表1所示,因此在考慮非線性未知干擾情況下,該方法補償性能有待改善。
3.3 基于LuGre+NDO模型自適應滑模控制分析
采用上文電機模型和LuGre模型,給定未知干擾信號D=20sin(πt)+rand(),在NDO中,設計p(θ,θ?)=λθ?,λ=80,L=2.90,其余參數取值k=10,h=γ=100,rd=50。給定輸入指令θd=sint,采樣時間為0.1ms,分別在有無干擾D的情況下進行仿真實驗,得到仿真曲線如圖5所示。
由圖5(a)、圖5(b)可以看出,在采用LuGre+NDO模型補償的自適應滑模控制下,系統的位置、速度跟蹤曲線能夠很好地擬合理想輸出曲線,消除了轉臺伺服系統低速“爬行”現象。對圖5(c)、圖5(d)分析可知,在受非線性干擾情況下,系統的位置、速度穩態誤差保持不變,位置穩態誤差控制在2×10?5rad左右,速度穩態誤差控制在1.5×10?3rad/s左右,結果見表1。仿真結果證明了該方法可以有效的降低伺服系統位置和速度跟蹤誤差,滿足轉臺使用的較高精度要求。
4 結束語
本文提出了一種基于LuGre+NDO模型補償的自適應滑模控制方法,針對摩擦干擾和不確定未知干擾分別進行了補償設計,并對比普通PID控制和基于LuGre模型自適應控制進行仿真實驗。仿真結果表明普通PID控制會出現低速“爬行”現象,基于LuGre模型自適應控制會出現未知干擾引起較大誤差波動現象。相比之下,本文方法能有效消除低速“爬行”現象,降低穩態誤差,提高跟蹤精度,同時也解決了低速轉臺受摩擦干擾之外諸多非線性干擾的影響問題。結果證明了所提出控制方法的有效性。
參考文獻
[1]李悅.高精度大尺徑軸系測角及控制系統研究與設計[D].哈爾濱:哈爾濱工業大學,2016.
[2]于偉,馬佳光,李錦英,等.基于LuGre模型實現精密伺服轉臺摩擦參數辨識及補償[J].光學精密工程,2011,19(11):2736-2743.
[3]劉東升,白樺,李文君,等.一種LuGre摩擦模型自適應補償的分析及仿真[J].計算技術與自動化,2015,34(3):16-20.
[4] XIE W F, ZHAO Z Y. Sliding-mode observer based adaptive control for servo actuator with friction [C]//Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, 2007.
[5] XIA X H, YU R. Servo system PID control of neural network algorithm based on LuGre model[J]. Chemical Engineering Transactions, 2015, 46: 151-156.
[6] SEONG I H, CHAN S J. Robust sliding mode control for uncertain servo system using friction observer and recurrent fuzzy neural networks[J]. Journal of Mechanical Science and Technology, 2012, 26(4): 1149-1159.
[7] HOU D Y. Integrated direct/indirect adaptive robust control of turntable servo system based on LuGre model friction compensation[C]//The 31th Youth Academic Annual Conference of Chinese Association of Automation, 2016.
[8]白國振,余潔皓.基于神經網絡補償的轉臺伺服系統控制研究[J].計算機應用研究,2016,33(6):1676-1681.
[9]常斌,常雅男,艾飛.飛行模擬轉臺非線性干擾觀測器反步滑模控制器設計[J].計算機測量與控制,2016,24(12):67-70.
[10]王喜明.基于LuGre模型的摩擦力矩補償研究[D].北京:中國科學院研究生院,2007.
[11] CHEN W H. A Nonlinear Disturbance Observer for Robotic Manipulators[J]. IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938.
(編輯:莫婕)
