基于老年代步車的車載智能管理系統設計
2019-11-19 12:13:38查懿倫
科技視界 2019年25期
查懿倫


【摘 要】針對現有的老年代步車功能上進行智能化改造,在現有的功能基礎上增加避障功能、自動巡航功能、電池管理系統等功能。其中避障功能采用超聲波檢測障礙物,使其遇到障礙物時能減速或停車。自動巡航功能通過限制電機轉速,從而使得車輛的行駛速度固定在某一個數值。防盜功能是在車輛上裝上傾角傳感器,當車輛被移動時,傳感器會檢測到相應的加速度與角速度,當測量的速度超過某個固定數值時,即可人為車輛被移動,從而車輛發出聲音警報。電池管理通過使用專用的電源芯片,編寫程序來進行電池的電量顯示、充放電等功能。
【關鍵詞】車載智能管理系統;超聲波避障;自巡航;傾角傳感器
中圖分類號: TP391.44;TN929.5文獻標識碼: A文章編號: 2095-2457(2019)25-0031-002
DOI:10.19694/j.cnki.issn2095-2457.2019.25.014
Design of on-board Intelligent Management System Based on Elderly Scooter
ZHA Yi-lun
(School of electrical and electronic engineering,chongqing university of technology,Chongqing 400054,China)
【Abstract】Based on the existing functions of elderly mobility vehicles,intelligent transformation is carried out.On the basis of the existing functions,obstacle avoidance function,automatic cruise function,battery management system and other functions are added.The obstacle avoidance function adopts ultrasonic detection to slow down or stop when encountering obstacles.The automatic cruise function fixes the vehicle's speed at a certain value by limiting the motor speed.The anti-theft function is to install an inclination sensor on the vehicle.When the vehicle is moved,the sensor will detect the corresponding acceleration and angular velocity.When the measured speed exceeds a certain fixed value,the human vehicle can be moved,and the vehicle will issue sound alarm.Battery management through the use of a special power chip, write a program to display the battery power,charge and discharge functions.
【Key words】Vehicle intelligent management system;Ultrasonic obstacle avoidance;Since the cruise;Dip sensor
0 引言
作為老年代步車,避障是老年代步車在行駛過程中必須要解決的問題[1]。常見的老年代步車避障有紅外避障和超聲波避障。紅外避障檢測范圍小,而且容易受到各種類型光源的干擾;而超聲波避障檢測距離較廣,超聲波模塊與舵機相連還能檢測來自不同方向的障礙物,檢測范圍寬,檢測距離長,不易受到外界其他因素干擾,是一種避障的好方法[2]。
目前,關于老年代步車在超聲波避障方面的研究相對比較多,其中大多數研究是從電機驅動原理、調速方案、測距原理方面等分析。
自巡航功能是老年代步車中較為重要的一個功能。常見的自巡航功能是通過在老年代步車上安裝一個車距傳感器,車距傳感器持續掃描前方車輛道路,當檢測到行駛道路上存在速度更慢的車輛時,自巡航系統會降低車速并控制前方車輛的間隙。當檢測到行駛道路上不存在車輛時,自巡航系統將加快車速使之回到原來的速度。該系統是通過限制電機轉速,從而使車輛的行駛速度固定在某一數值上,以保障老年代步車的安全性。
防盜功能也是老年代步車中不可或缺的功能之一,在老年代步車中增加一個傾角傳感器也是實現防盜功能的主要手段之一。其中傾角傳感器大致有三類[3],擺式傳感器,利用角速度積分的傳感器和多種傳感器組成的復合式傾角傳感器。其中擺式傳感器又可以根據擺的不同而分為固體擺式跟液體擺式以及氣體擺式,通常,固體擺式傳感器是最常使用的傾角傳感器。在該系統中選擇的是利用角速度進行積分的傾角傳感器[4],車輛被移動時,傳感器會檢測到相應的加速度與角速度,當測量的速度超過某個固定數值時,即可人為車輛被移動,從而車輛發出聲音警報。
1 車載智能管理系統的組成與各功能的原理
該車載管理系統主要包括以下幾部分:避障系統、自巡航系統、防盜系統。
1.1 超聲波避障系統
超聲波檢測過程:在老年代步車的車頭正中間加一個超聲波避障模塊,該避障模塊是一個有發射器與接收器的傳感器。當發射器發射出超聲波被障礙物接收時,會被障礙物將聲波反彈至接收器上,然后通過超聲波避障模塊將接收器接收到的聲波傳送至避障控制器進行信號的處理得到避障信號,避障信號又通過電路將信號傳遞至電機驅動模塊使電機開始轉動并且使舵機控制轉向,最后將處理好的信號發送給老年代步車,使得老年代步車能得以正常的運行,最終起到避障的功能。主要是根據聲音在空氣中的傳播速度為340m/s,時間t為發射器發射超聲波到接收器接收超聲波的時間差?駐t,根據S=V·?駐t/2,即可求出避障物到代步車之間的距離。
1.2 自巡航系統
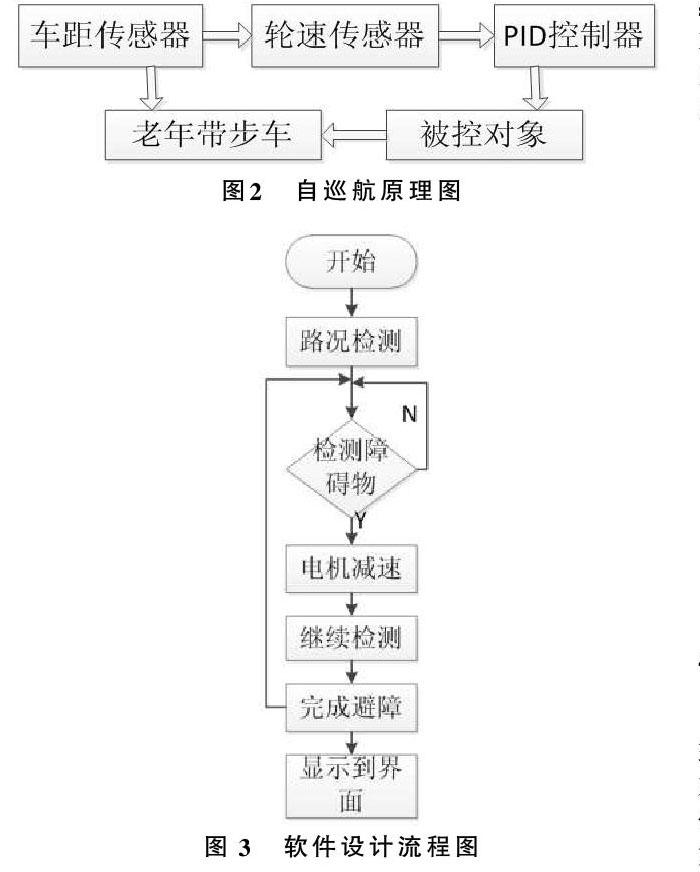
自適應巡航系統就是在老年代步車前部安裝一個車距傳感器,用車距傳感器掃描前方的路段,同時再用輪速傳感器收集信號。將信號傳遞給PID控制器里,然后PID控制器又將信號傳遞給被控對象,最后再傳遞給老年代步車。其中使用PID控制器是因為PID控制可以適應各種控制對象,只要參數穩定合適,即可實現無差控制,穩定性好。自巡航原理圖如圖2所示。
1.3 防盜系統
防盜系統是在老年代步車上安裝傾角傳感器,利用傾角傳感器在一個系統內部雖然無法測量其速度,但是可以測量加速度,且在初速度已知的情況下,利用積分算出線速度,進而計算出直線位移,當位移達到一定的值時,就會觸發蜂鳴器報警,從而起到防盜的作用。當傾角傳感器靜止時,即側面跟垂直方向沒有加速度作用,那么作用在其表面的就只有重力加速度。重力垂直軸與加速度傳感器靈敏度之間的夾角就是傾斜角,其中傾角傳感器的角度計算公式可大致記為:
2 車載智能管理系統軟件設計
軟件設計主要由以下幾部分構成:主程序控制,輪速傳感器的檢測的程序,超聲波避障程序,中斷程序等幾大部分構成,其軟件流程圖如圖3所示。
3 車載智能管理系統測試
車載管理系統的測試結果可以在車載智能管理系統的界面上看到,界面上可以顯示出路況的實物照片,以及行駛里程數。車載智能管理系統的界面是由android studio軟件設計,該軟件主要是用來開發各種android的游戲跟android app。運用android studio開發的車載智能管理系統,可用來顯示自巡航跟避障的結果,還可實現緊急聯系人的設置等,實物圖如圖4。
4 結語
經實驗可得,在此次基于老年代步車的車載智能管理系統中,增加的超聲波避障功能,自巡航與防盜功能對車載智能管理系統有著相當重要的作用,其他的實用性功能還可以繼續探索跟研究,讓車載智能管理系統更加完善。
【參考文獻】
[1]尚建榮,黃海燕,王福杰.基于LPC1769的智能小車設計[J].微電機,2014,47(10):76-78.
[2]張萍.超聲波避障智能小車的設計[J].自動化儀表,2017,38(9):40-43.
[3]張維勝.傾角傳感器發展與原理[J].傳感器世界,2002,8:18-21.
[4]高國偉.傾角傳感器[J].傳感器世界,1995,8:29-38.
[5]谷文豪,王洪亮,皮大偉,等.基于傾角傳感器的坡道角度識別研究[J].河北科技大學學報,2015,36(6):566-572.