風電變流器并聯控制的環流抑制策略研究
2019-11-21 05:37:48江宏玲戴新榮
安慶師范大學學報(自然科學版) 2019年4期
周 成,江宏玲,戴新榮,謝 芳
(1.安徽國際商務職業學院信息工程學院,安徽合肥231131;2.安徽省(水利部淮河水利委員會)水利科學研究院,安徽合肥230088;3.安徽省建筑工程質量監督檢測站,安徽合肥230088;4.安徽大學工業節電與電能質量控制協同創新中心,安徽合肥230601)
隨著風電裝機容量的不斷加大,對大功率風電變流器的需求日益突出。大功率風電變流器一般可由較小功率的風電變流器并聯得到。環流的存在導致絕緣柵雙極型晶體管(IGBT)電流不均,使得IGBT功率器件的電流應力不平衡,這導致IGBT功率器件長期處于嚴重的熱狀態,最終導致IGBT器件燒毀[1-3]。因此,在并聯控制時如果不處理好環流問題,會降低系統的控制性能和發電效率,甚至造成系統不可恢復性崩潰,給用戶帶來巨大損失[4-5]。如何解決好環流問題成為變流器并聯的核心問題。國內外學者對變流器的并聯控制進行了相關的研究,文獻[1]提出了一種利用電抗器和減小零序電流控制算法來抑制動態環流,控制效果較好,但算法較復雜。文獻[2]提出了一種主從式的變流器并聯控制方案,并聯系統能穩定運行,但效率不高。文獻[3-6]分別給出了零序環流的控制算法、脈寬調制波重構算法等控制算法,在很多變流器控制中得到了應用,但算法復雜、成本較高。基于以上研究存在的問題,在分析多種變流器控制技術的基礎上,針對大功率變流器并聯控制,本課題組提出網側和機側獨立控制環流抑制策略。
1 環流等效數學模型
圖1所示為實際工程應用中普遍采用的兩臺變流器共直流側并聯拓撲圖,變流器并聯控制必然帶來如圖1所示的環流問題。
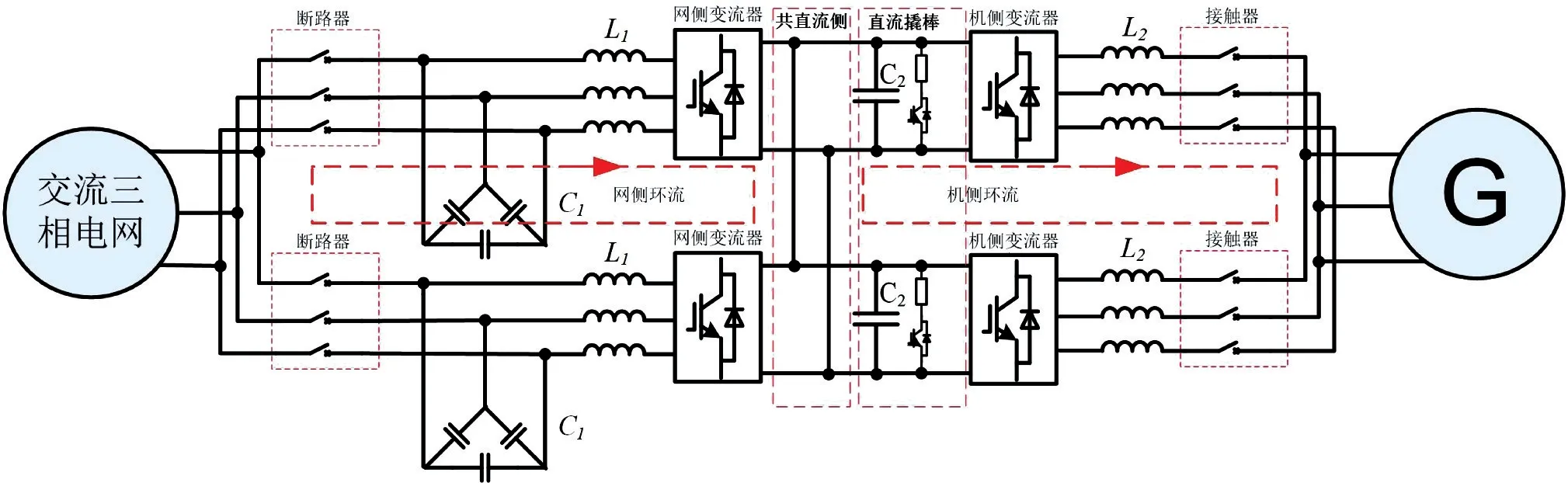
圖1 變流器并聯時的環流
為了對兩臺變流器共直流側并聯系統進行環流分析,對圖1所示的機側與網側拓撲電路做等效數學模型的推導,得到并聯系統的等效平均模型。使用坐標變換,每個相橋臂的數學模型等效到同步旋轉坐標系[7-8],如圖2所示。圖2中各變量的下標g、σ分別代表機側和網側變量,下標1、2分別代表機側或網側的兩個變流器,下標d、q、z分別代表d軸、q軸、z軸(零軸)分量。eσz、egz分別為網、機側電勢的z軸(零軸)分量,ωσ為電網同步角速度、ωg為電機同步角速度,R為每相線路電阻(含電感電阻),d為變流器三相橋臂的占空比分量,i為環流。
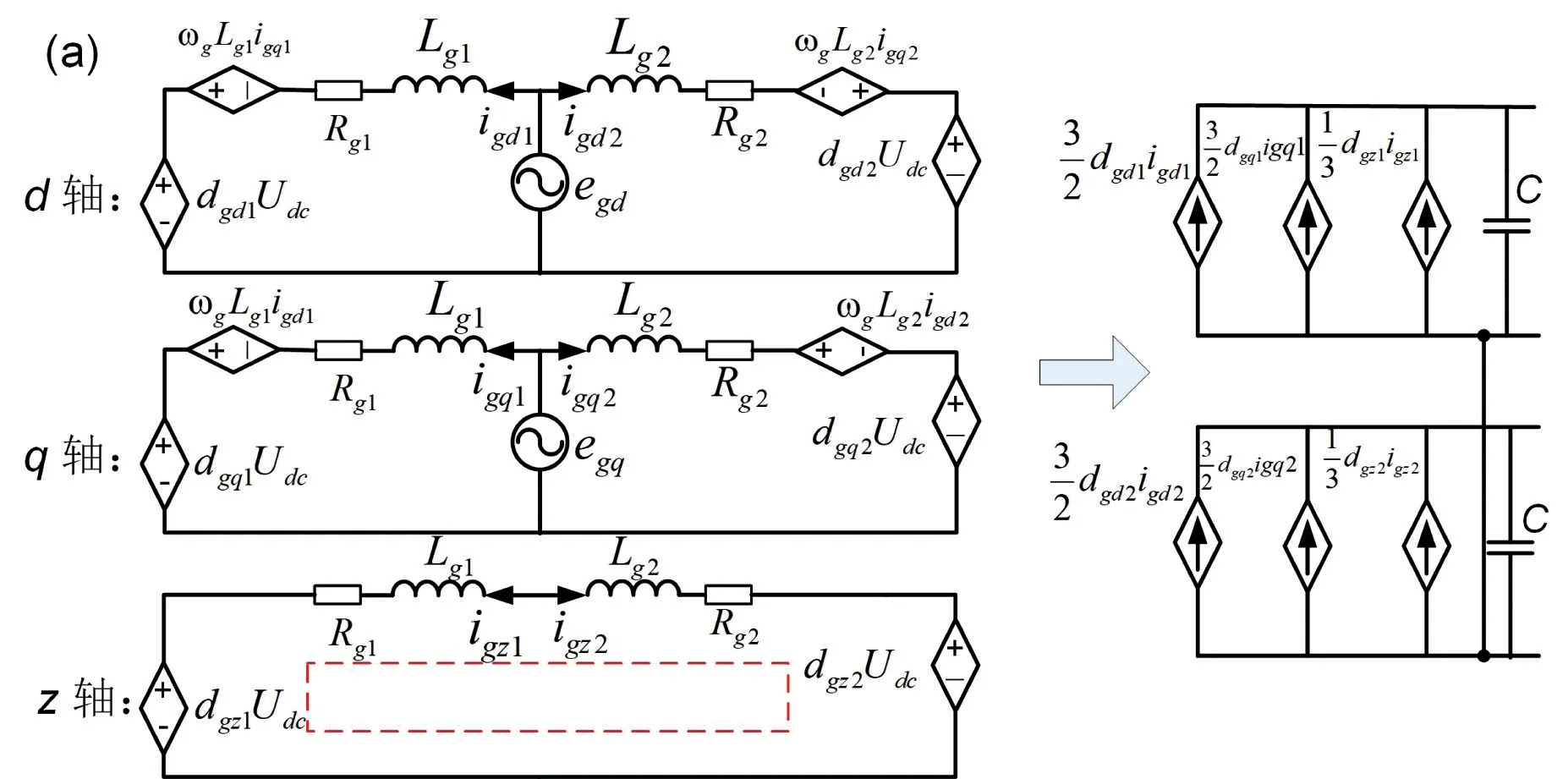
圖2 (a) 并聯系統機側平均模型
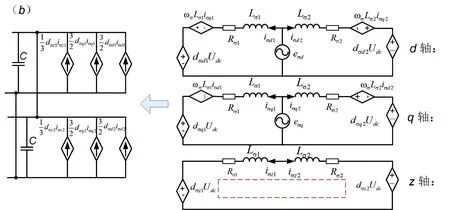
圖2 (b) 并聯系統網側平均模型
由圖2所示的并聯系統平均模型可知,機、網側的環流是相互獨立的。以機側環流為例(網側環流類似),兩機側變流器的各橋臂占空比Z軸分量不等(dgz1≠dgz2)是造成環流的主要原因,要控制環流需要調節dgz1或dgz2即可[9-10]。圖2所示的機、網側環流表達式為

2 兩種環流抑制策略
由上文分析可知,并聯變流器機、網測的環流相互獨立并且環流產生的主要原因是兩機側或網側變流器的三相橋臂占空比的零軸分量或。在進行環流抑制時可對機、網側進行分開設計,以機側環流抑制為例(網側可類似得到)有如圖3(a)和圖3(b)兩種環流抑制策略。
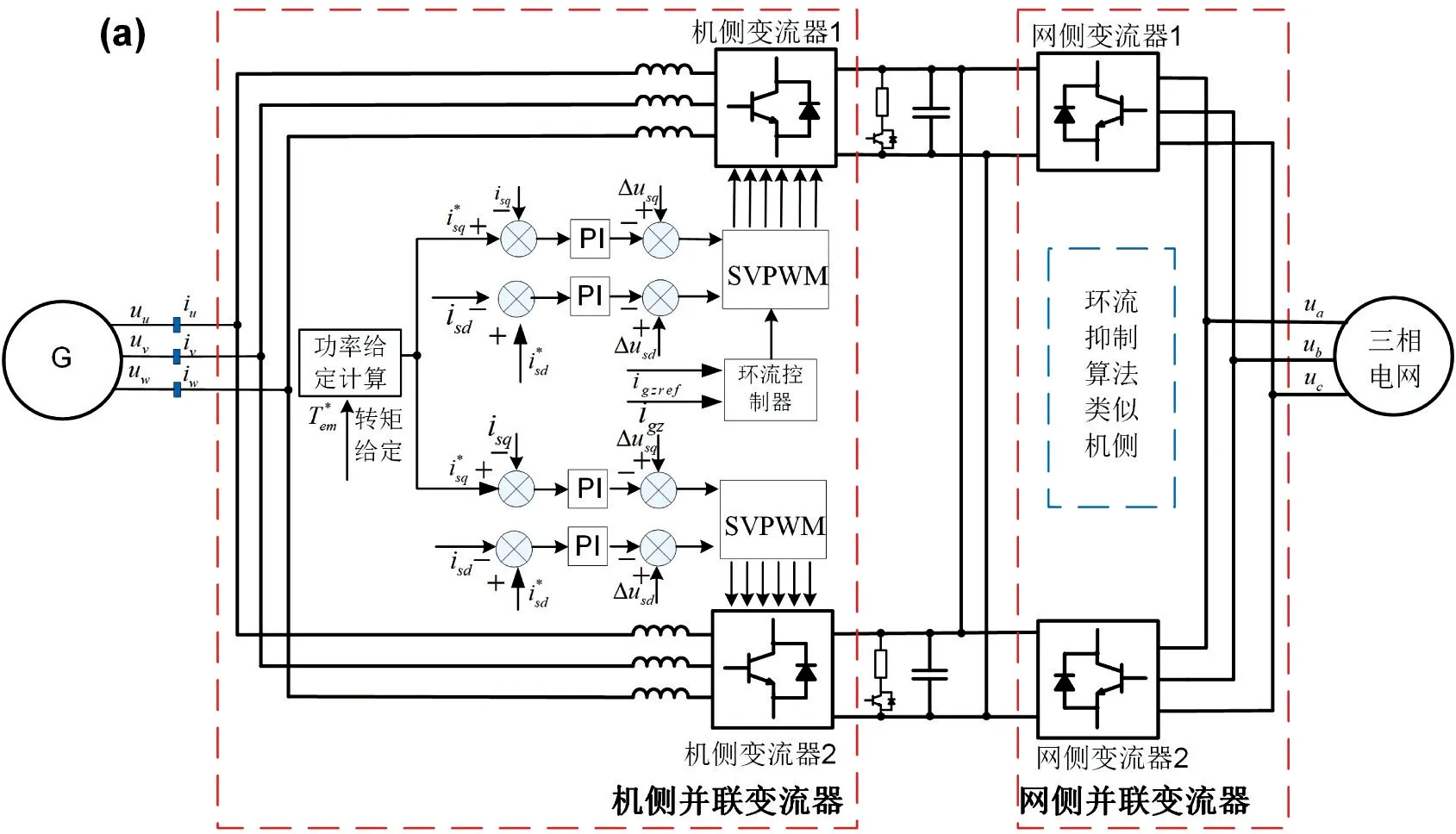
圖3 (a) 機側變流器分開控制策略
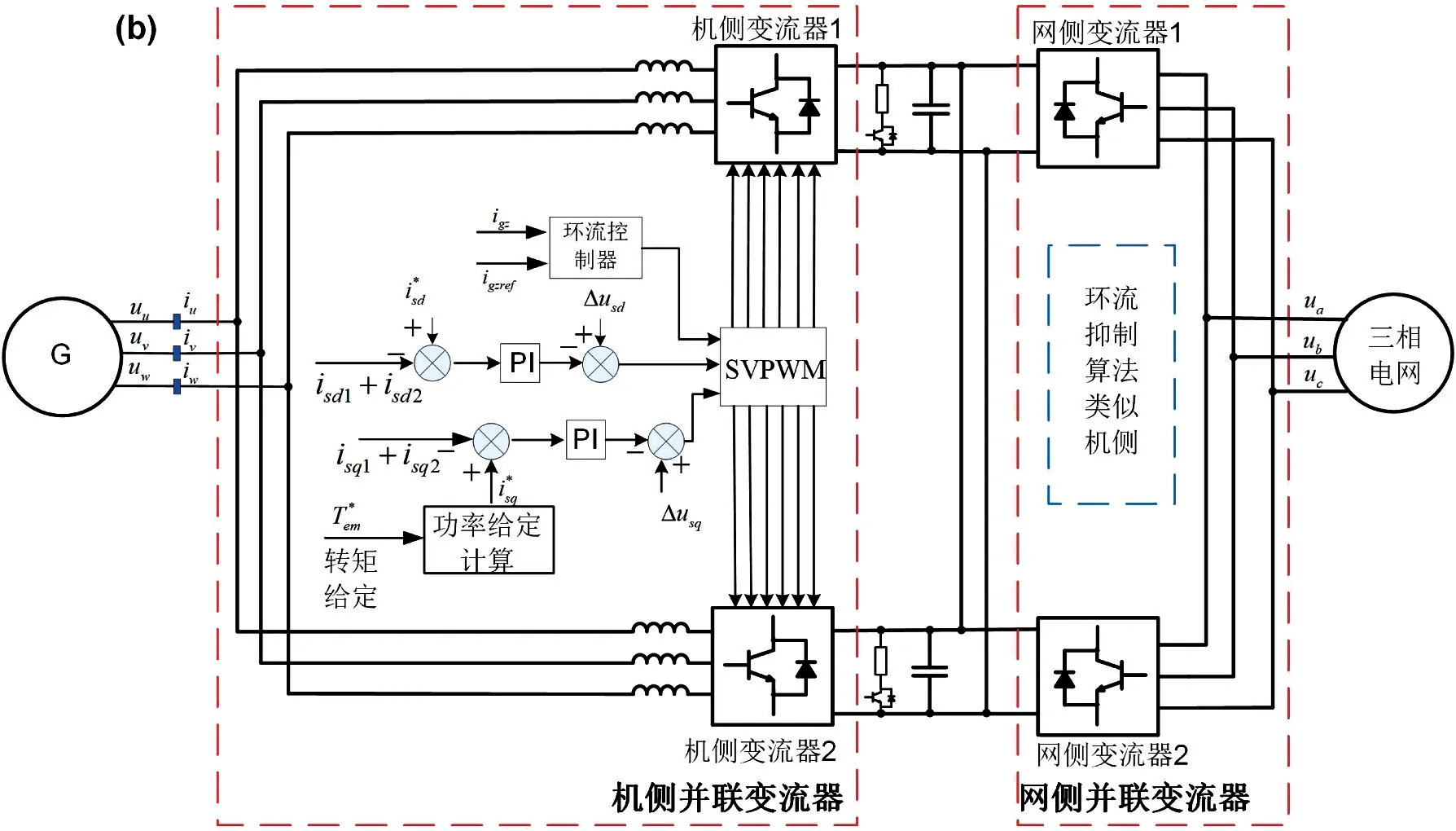
圖3(b) 機側變流器統一控制策略
圖3 (a)所示的環流抑制方法是:忽略機側變流器的并聯上、下橋臂PWM 驅動信號的不一致問題。在機側變流器1的控制中加入零序電流控制,設計環流抑制器只抑制機側變流器1的環流,機器變流器2的環流自然得到抑制。使用電流傳感器測得機側變流器的三相電流并算出Z軸(零軸)電流信號(給定值為0)作為反饋信號送入環流抑制器,經PI調節器作為環流抑制器的輸出再分送補償到三相橋臂占空比零矢量上來調整零軸分量dgz1,從而實現環流的抑制。為了得到較理想的環流抑制效果對并聯上、下管的PWM驅動信號的一致性要求較高,但這種控制策略實際上是機側變流器1和2各采用一套電流環控制,并聯上、下管的PWM驅動信號分別由各自電流環輸出控制。如圖4所示,當兩套電流環控制輸出的PWM驅動信號不一致、A橋臂的上管A1導通時,A橋臂的下管A4可能導通,這樣電流會從直流母線的正極經過A1和A4再流入直流母線的負極形成橋臂間環流。
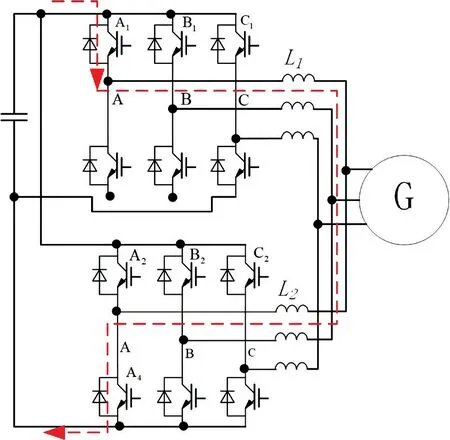
圖4 橋臂之間環流
圖3 (b)所示環流抑制方法是:考慮如圖4所示的并聯上、下管的PWM驅動信號的一致性。采用機側兩個變流器用一個DSP控制(網側類似),也就是機側并聯采用一個電流環控制。該控制策略通過將電流傳感器檢測到的兩個變流器的三相電流之和送入PI調節器的反饋端,電流環的給定由轉矩控制算法得到,通過一個電流環調節后輸出信號經過SVPWM來控制兩并聯變流器的開通和關斷。在并聯側采用同一個載波和同一個調制信號,避免了圖3(a)所示控制策略的上、下橋臂PWM驅動信號的不一致問題,從而達到抑制橋臂環流的目的。
3 仿真與實驗
系統仿真參數為網側濾波參數L=0.6 mH、C=160 uF,且給定無功電流均為400 A。仿真波形如圖5所示,圖5(a)所示為未加環流抑制的波形,可以看出兩并聯輸出的電流不一致;圖5(b)所示為加入環流抑制后的電流波形,可以看到電流波形基本重合,環流減小。
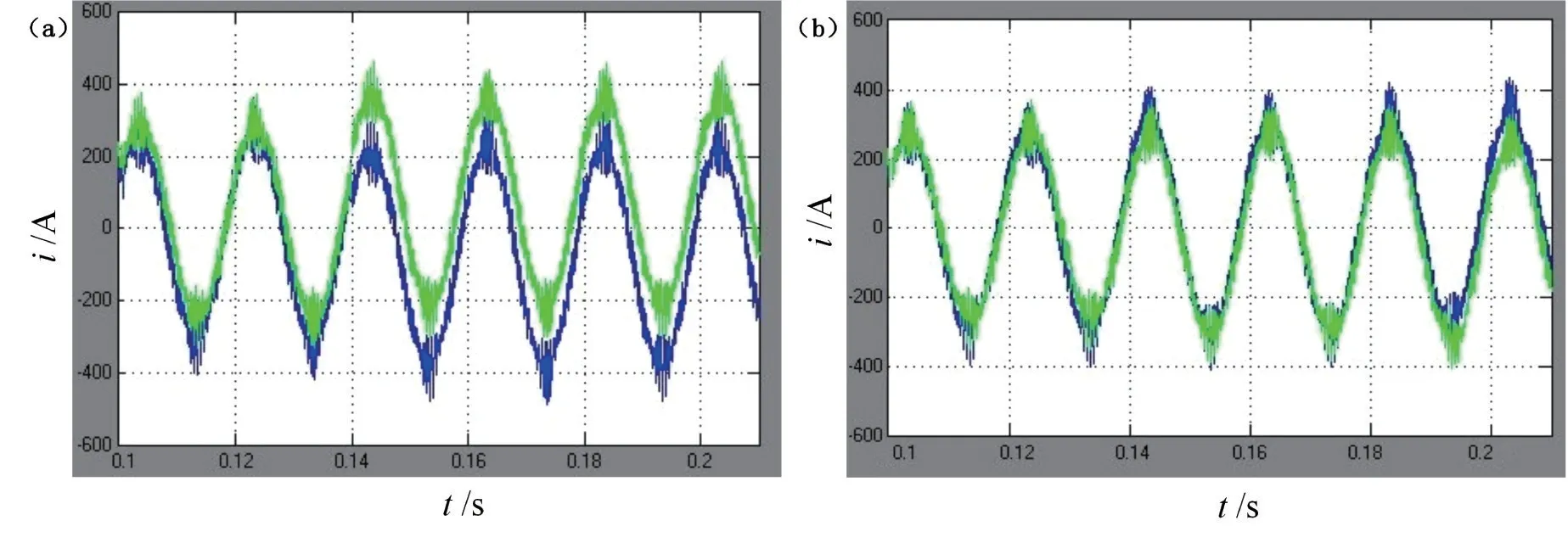
圖5 環流抑制策略仿真。(a)加環流抑制的波形;(b)加環流抑制的波形
基于上述仿真,搭建了小功率實驗平臺開展控制方案的相關實驗驗證。實驗平臺的系統框圖如圖6所示。DSP2808主要用于電壓、電流等信號采樣和算法處理等,FPGAEP2C8主要用于調節占空比和系統故障處理等。變流器逆變橋采用英飛凌公司的FF100R12RT4 搭建,其電流和電壓等級為100 A 和1 200 V。

圖6 實驗平臺控制結構框圖
當給定電流一致且交流側接入的電感較大時,采用圖3所示的兩種控制策略均能獲得如圖7所示的基本沒有環流的良好控制效果。
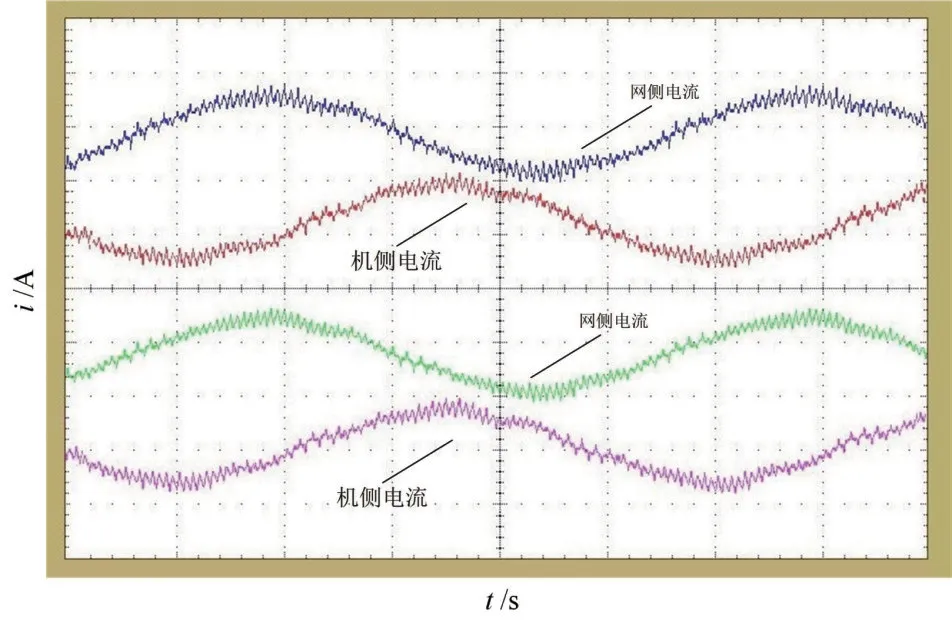
圖7 參數相同時電流波形

圖8 給定電流不一致時電流波形
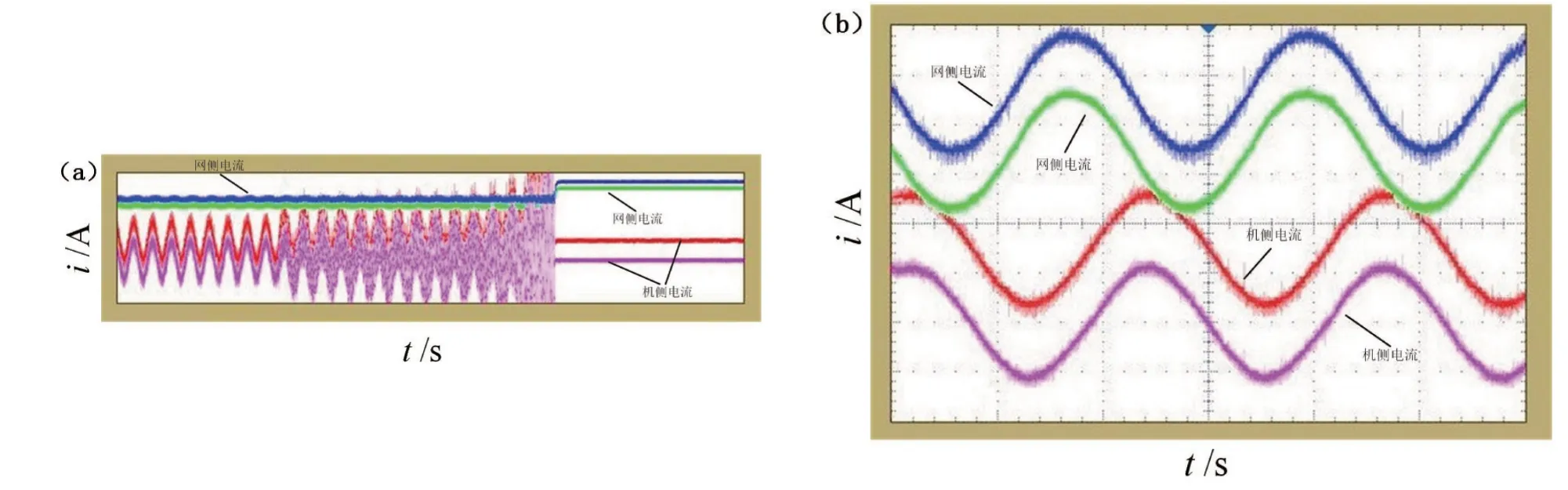
圖9 濾波電感很小時兩種控制策略電流波形。(a)圖3(a)控制策略電流波形;(b)圖3(b)控制策略電流波形
當給定電流不一致且交流側接入的電感較大時,采用圖3(a)所示的控制策略得到圖8所示電流波形,實驗波形表明,在加入環流抑制后波形有所改善,環流抑制控制有一定的效果。但是當機側和網側接入0.02 mH的小電感時,則并聯會產生較大的環流,圖3(a)所示的控制策略會使變流器產生如圖9(a)所示的系統過流保護,系統工作性能很差,甚至導致變流器系統停機。而采用圖3(b)所示的控制策略則可以正常并網運行并且基本沒有環流,電流波形如圖9(b)所示。因此,實際的變流器中機側的電感通常都較小,為了得到良好的環流抑制和控制效果應選擇圖3(b)控制策略。
4 結 論
綜上所述理論分析和仿真實驗驗證了環流抑制策略的可行性,結論主要為并聯變流器各橋臂占空比z軸分量不等(dgz1≠dgz2或dσz1≠dσz2)是造成環流和電流波形畸變的主因。共直流側并聯時機/網側環流互相獨立,兩側抑制方案可分開設計。當濾波電感參數很小時采用第二種控制策略可確保穩定運行并取得較好的環流抑制效果和良好的控制性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
