基于雙相機(jī)的激光照射性能監(jiān)測系統(tǒng)圖像畸變矯正方法
2019-11-23 08:46:36徐向鍇羅秦景文博劉健
關(guān)鍵詞:系統(tǒng)
徐向鍇,羅秦,景文博,劉健
(1.長春理工大學(xué) 光電工程學(xué)院,長春 130022;2.長春理工大學(xué) 電子信息工程學(xué)院,長春 130022)
激光照射性能監(jiān)測系統(tǒng)是靶場鑒定、定型試驗(yàn)中的重要測試設(shè)備之一;該系統(tǒng)主要由激光照射器,移動靶車和成像系統(tǒng)組成。在拍攝過程中,相機(jī)跟隨物體進(jìn)行原地轉(zhuǎn)動,由于拍攝角度是動態(tài)變化的,拍攝出的圖像存在透視畸變;且成像部分采用的紅外光、可見光兩路相機(jī)存在不同視場、不同分辨率、不共軸和紅外光圖像無明顯參考標(biāo)志的問題,導(dǎo)致無法同時(shí)實(shí)現(xiàn)對雙路圖像的矯正。
目前,對圖像透視畸變矯正大多停留在單相機(jī)系統(tǒng)下的矯正,主要方法有角度矯正法,利用Radon變換[1-2]或者Hough變換[3]檢測出圖像的傾斜角度并進(jìn)行矯正,忽略了透視畸變、默認(rèn)畸變圖像與原圖像滿足仿射變換,當(dāng)相機(jī)與物體距離較近時(shí),矯正算法將不在有效;Wand[4]、Lucchese[5]等人提出了同時(shí)校正傾斜畸變和徑向畸變的方法,但需要引入5次多項(xiàng)式的徑向畸變模型,大大增加了算法的復(fù)雜度;利用放射非線性變換矩陣進(jìn)行鏡頭畸變矯正[6],但無法確定非線性矩陣的初值,所以容易引起較大的誤差;根據(jù)傳統(tǒng)的像差理論,利用圖像采集系統(tǒng)中光學(xué)子系統(tǒng)的結(jié)構(gòu)參數(shù)計(jì)算出畸變曲線,作為空間變換的規(guī)則,對圖像實(shí)施矯正[7],此方法需要知道光學(xué)系統(tǒng)的結(jié)構(gòu)參數(shù)這往往有諸多不便,因此這種方法不常用。而本系統(tǒng)采用的是雙路相機(jī),而紅外光圖像中為了對光斑進(jìn)行清晰成像,背景會變得模糊,因此無法對紅外光圖像進(jìn)行單獨(dú)的透視畸變矯正。在這些條件下,對兩路相機(jī)進(jìn)行透視畸變的矯正是很困難的,目前還沒有一種有效的方法能夠同時(shí)矯正雙路圖像,因此需要一種針對性的方法來解決該困難。
本文根據(jù)這一問題,提出了一種在雙相機(jī)透視系統(tǒng)下的雙路圖像矯正方法。該方法利用空間坐標(biāo)系變換、矩陣運(yùn)算,在不需要畸變圖像旋轉(zhuǎn)角度的情況下能夠?qū)梢姽鈭D像和紅外光圖像同時(shí)矯正。實(shí)驗(yàn)結(jié)果表明,本文算法有矯正效果顯著,速度快、復(fù)雜度低等優(yōu)點(diǎn)。
1 雙相機(jī)成像測量原理
1.1 雙相機(jī)成像測量系統(tǒng)概述
圖1是雙相機(jī)成像測量設(shè)備結(jié)構(gòu)示意圖,測量系統(tǒng)由激光照射器、靶板、雙路CCD相機(jī)和計(jì)算機(jī)組成。靶板在靶道上水平移動,轉(zhuǎn)臺上的雙路CCD相機(jī)跟隨靶板轉(zhuǎn)動,分別用可見光相機(jī)和紅外相機(jī)實(shí)時(shí)采集靶板圖像和紅外光斑圖像并保存。完成保存后,再提取靶板十字中心和光斑中心,根據(jù)圖像上光斑中心與靶板十字中心的相對位置,計(jì)算出兩者的偏差量,用以指代武器系統(tǒng)的指向精度。
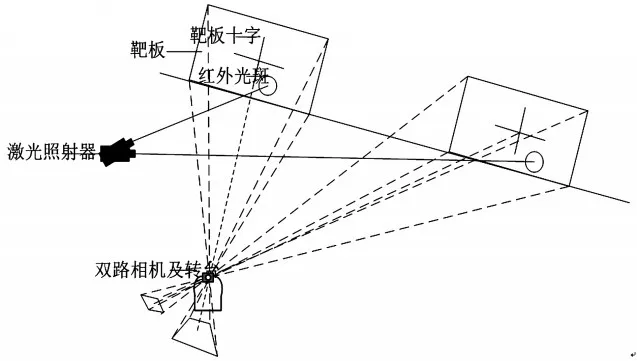
圖1 雙相機(jī)成像測量設(shè)備結(jié)構(gòu)示意圖
1.2 雙相機(jī)系統(tǒng)透視畸變
如圖2所示,在利用CCD相機(jī)錄取圖像時(shí),由于相機(jī)無法正對靶板,使得相機(jī)光軸與靶板平面的法線方向存在夾角,根據(jù)相機(jī)的透視成像原理,此時(shí)可見光CCD相機(jī)所成的靶板圖像存在透視畸變,這會對之后的靶板十字中心的提取造成誤差;同樣的,當(dāng)紅外光相機(jī)對光斑成像時(shí)也會存在透視畸變,對光斑中心的提取造成誤差。并且本系統(tǒng)是雙相機(jī)系統(tǒng),可見光相機(jī)與紅外相機(jī)不同軸,且分別率與視場角均不相同,因此兩者所成的像存在三維空間上的差異,這更增加了后期處理的難度,為了提高測量精度,在識別圖像之前,要對畸變的靶板圖像和紅外光斑圖像進(jìn)行畸變矯正。本文提出了一種基于雙相機(jī)透視系統(tǒng)的畸變圖像矯正方法。
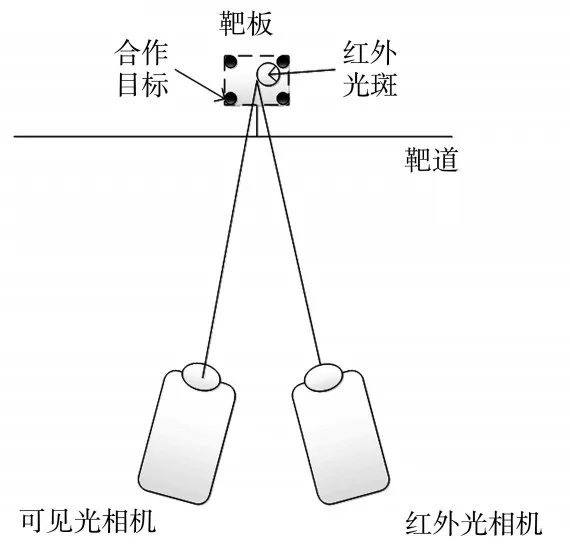
圖2 畸變成像示意圖
2 雙相機(jī)透視畸變矯正
由于本系統(tǒng)為攝遠(yuǎn)系統(tǒng),受到大氣湍流的影響較大,為了保證光斑的質(zhì)量,減少光在傳播過程中受到環(huán)境的影響,采用波長為1 064 nm的激光照射器發(fā)射光斑。雙相機(jī)系統(tǒng)中,可見光相機(jī)的響應(yīng)波長范圍是380~780 nm,紅外光相機(jī)的相應(yīng)波長范圍為(1 064±1)nm。因此在紅外光相機(jī)所成的像中除了光斑外幾乎沒有其他可以參照的標(biāo)志點(diǎn),而在成像過程中為了對光斑進(jìn)行清晰成像,背景會變得更加模糊,無法獲得合作目標(biāo)的位置,因此無法使用現(xiàn)有的技術(shù)對紅外光畸變圖像進(jìn)行單獨(dú)的透視畸變校正。
針對這一問題,本文提出了一種基于空間變換的矯正方法。基本原理是利用兩個(gè)空間的變換關(guān)系,將紅外圖像的矯正問題轉(zhuǎn)化為在可見光空間下的矯正。基本方法是首先運(yùn)用網(wǎng)格板標(biāo)定法,確定可見光空間坐標(biāo)與紅外光空間坐標(biāo)的坐標(biāo)轉(zhuǎn)換關(guān)系,即矩陣T2;然后運(yùn)用目標(biāo)識別技術(shù),計(jì)算出可見光圖像矯正矩陣T1,用于對可見光圖像的矯正;最后計(jì)算出紅外光圖像矯正矩陣T3。
2.1 坐標(biāo)變換矩陣
將紅外光圖像的矯正問題利用坐標(biāo)變換矩陣使其在可見光的三維空間中完成,如圖3所示。
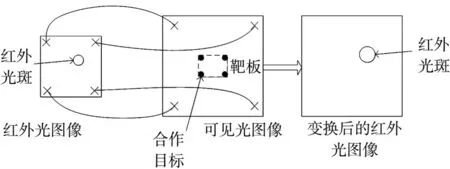
圖3 紅外光斑圖像空間變換示意圖
實(shí)驗(yàn)所需的設(shè)備為:光源、標(biāo)準(zhǔn)網(wǎng)格板、平行光管、雙路相機(jī)、計(jì)算機(jī)、相關(guān)軟件,實(shí)驗(yàn)系統(tǒng)如圖4所示。

圖4 標(biāo)準(zhǔn)網(wǎng)格板標(biāo)定系統(tǒng)
具體做法為利用可見光相機(jī)以及紅外光相機(jī)分別對標(biāo)準(zhǔn)網(wǎng)格板進(jìn)行靜態(tài)采像,獲取靜態(tài)可見光圖像以及靜態(tài)紅外光圖像,采集到的圖像如圖5所示。
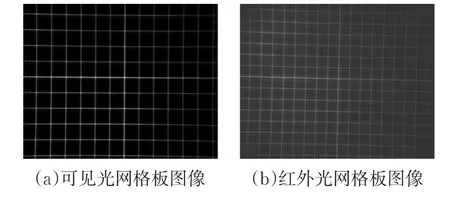
圖5 網(wǎng)格板圖像
在圖5中,可以找到兩條亮度最亮的相互垂直的直線,為標(biāo)準(zhǔn)網(wǎng)格板的中心線,然后以其中視場較小的圖像為基準(zhǔn),以標(biāo)準(zhǔn)網(wǎng)格板中心線為依據(jù),讀取網(wǎng)格頂定點(diǎn)坐標(biāo),獲取靜態(tài)可見光圖像上的多個(gè)可見光特征點(diǎn);在靜態(tài)紅外光圖像上獲取與可見光特征點(diǎn)同一位置的紅外光特征點(diǎn);值得注意的是在兩幅圖像中讀取的特征點(diǎn)坐標(biāo)必須要一一對應(yīng)。
根據(jù)可見光特征點(diǎn)以及紅外光特征點(diǎn)確定坐標(biāo)變換矩陣。
一般的,4對特征點(diǎn)即可得出坐標(biāo)變換矩陣。特征點(diǎn)對越多,矩陣越精確。在實(shí)際應(yīng)用中取10~15對特征點(diǎn),設(shè):
通過公式(2)即可解出T2,計(jì)算公式如下:

其中,(x,y)為原始圖像像素坐標(biāo);(u=X/W,v=Y/W)為變換后的圖像像素坐標(biāo)。

2.2 雙相機(jī)圖像矯正
對于可見光靶板圖像的矯正,采取的是合作目標(biāo)檢測法[8],對于合作目標(biāo)的檢測,如圖6所示。
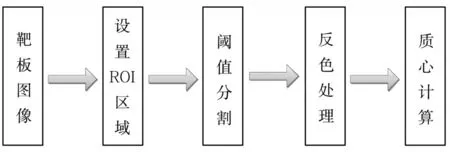
圖6 合作目標(biāo)檢測流程圖
由小孔成像原理可知:

其中,w和h為靶板的寬高;u和v為靶板寬高所占像素?cái)?shù);f為焦距;μ為相機(jī)的像元尺寸;L為相機(jī)到靶板中心的距離。則理想控制點(diǎn)坐標(biāo)的計(jì)算公式為:
設(shè)可見光透視變換矩陣為:
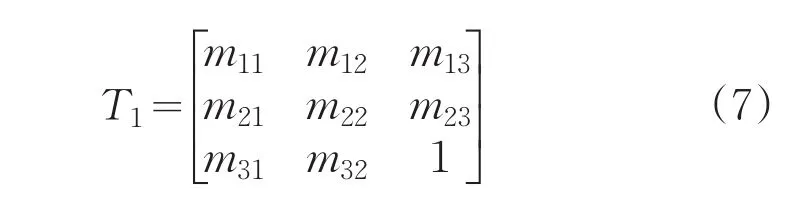
矩陣的前兩行實(shí)現(xiàn)了線性變換和平移,第三行用于實(shí)現(xiàn)透視變換。
則畸變矯正的過程為:
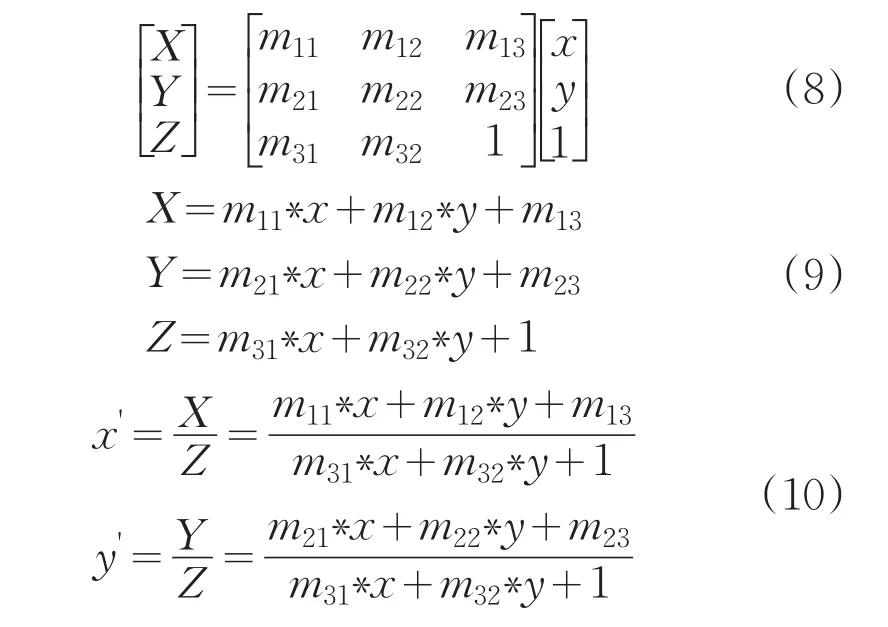
其中,(x,y)是畸變圖像的像素點(diǎn)坐標(biāo);(x′,y′)是正視圖像的坐標(biāo);m11,m12,m13,m21,m22,m23,m31,m32,m33是透視變換參數(shù)。
以上公式設(shè)變換之前的點(diǎn)是z值為1的點(diǎn),它三維平面上的值是x,y,1;在二維平面上的投影是x,y;通過矩陣變換成三維中的點(diǎn)X,Y,Z;再通過除以三維中Z軸的值,轉(zhuǎn)換成二維中的點(diǎn)x',y'。
將4對實(shí)際靶板的合作目標(biāo)與對應(yīng)的畸變圖像上的合作目標(biāo)點(diǎn)作為已知條件,可以解出透視變換參數(shù)[9],將上式改寫為:
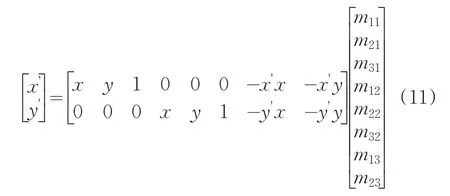
再將理想靶板圖像和畸變靶板圖像上的四個(gè)點(diǎn)對帶入到以上公式中得:
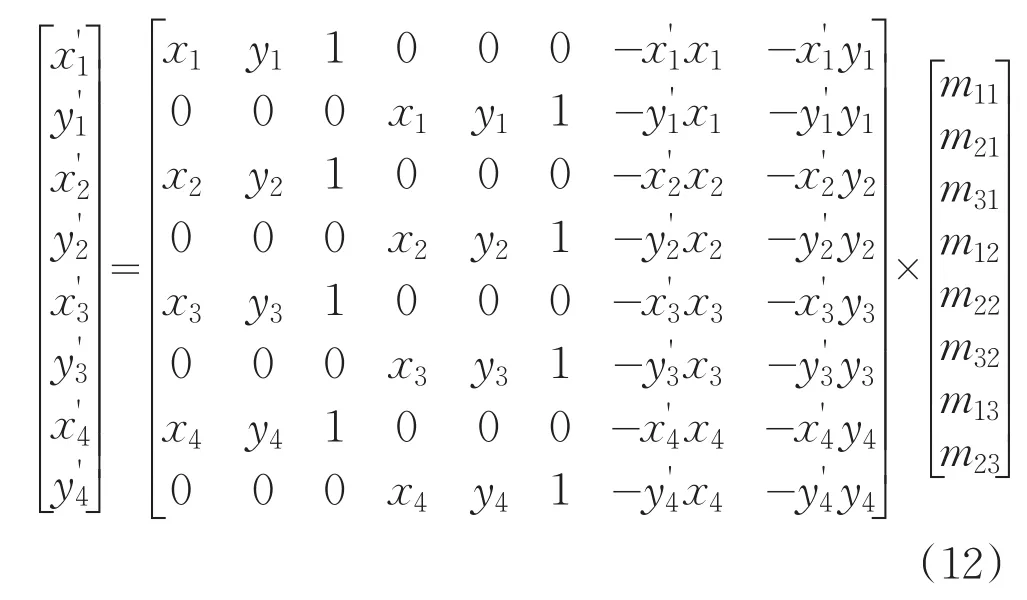
將上式記做:

得:

從而可求得可見光透視變換參數(shù),得到可見光透視變換矩陣T1。
設(shè)畸變的靶板圖像為 f(x , y),矯正后的無畸變的靶板圖像為g(x , y ),則:

利用公式

確定紅外光透視變換矩陣T3。在根據(jù)公式:

求得矯正后的紅外光斑圖像。
從而實(shí)現(xiàn)對雙相機(jī)系統(tǒng)的畸變矯正
根據(jù)上述過程,本文提出的畸變矯正方法如圖7所示。

圖7 畸變矯正示意圖
大致步驟如下所示:
(1)通過標(biāo)準(zhǔn)網(wǎng)格板標(biāo)定法計(jì)算坐標(biāo)變換矩陣T2。
(2)對可見光靶板圖像做合作目標(biāo)點(diǎn)匹配算法,得到畸變前后合作目標(biāo)在圖像上的對應(yīng)坐標(biāo)關(guān)系,計(jì)算可見光透視變換矩陣T1。
(3)利用可見光透視變換矩陣T1和坐標(biāo)變換矩陣T2計(jì)算出紅外光透視變換矩陣T3。
(4)利用可見光透視變換矩陣T1對可見光靶板圖像矯正;利用紅外光透視變換矩陣T3對紅外光斑圖像矯正。
3 實(shí)驗(yàn)結(jié)果和討論
雙相機(jī)透視系統(tǒng)由激光照射器,可見光CCD相機(jī)、紅外光CCD相機(jī)、計(jì)算機(jī)等組成。設(shè)備參數(shù)如表1所示。
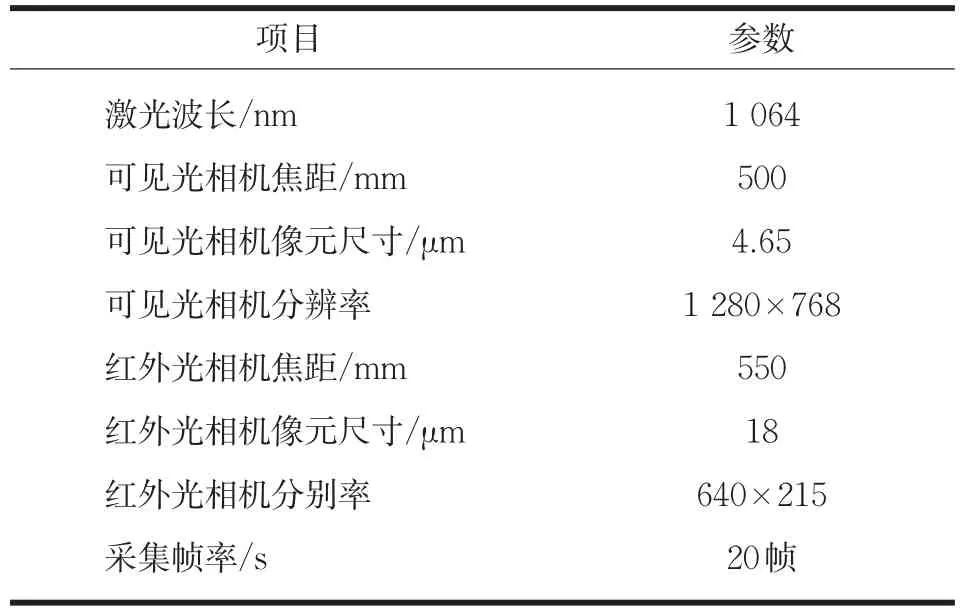
表1 設(shè)備參數(shù)
用標(biāo)準(zhǔn)網(wǎng)格板選取的可見光圖像特征點(diǎn)如表2所示。
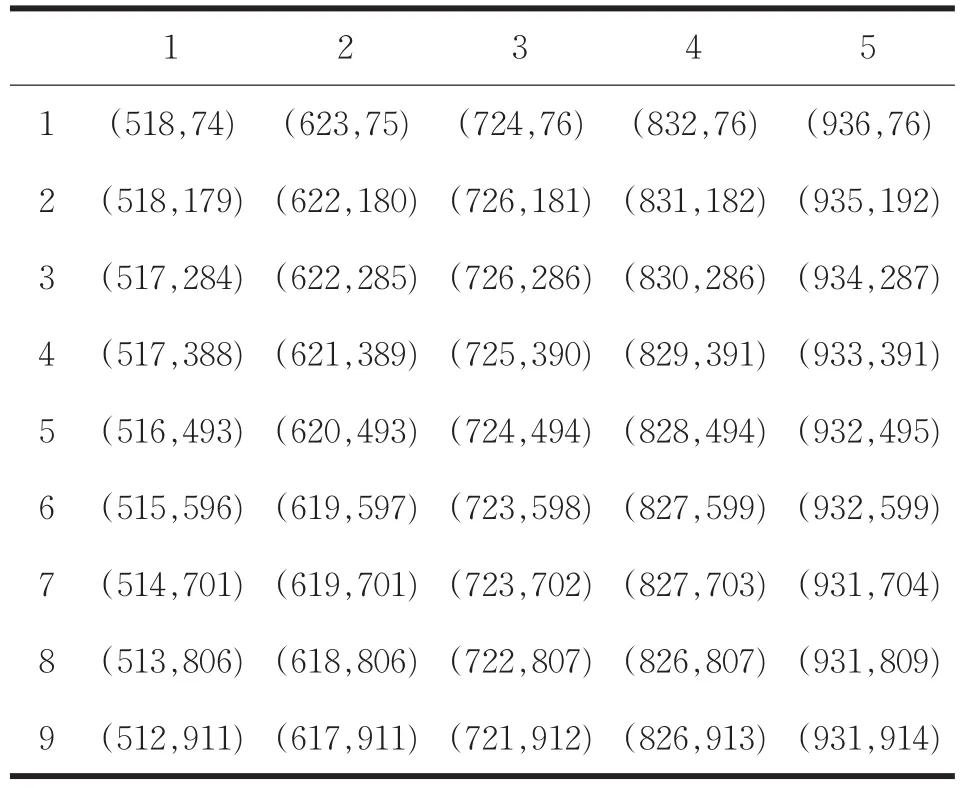
表2 可見光圖像標(biāo)準(zhǔn)網(wǎng)格板特征點(diǎn)
用標(biāo)準(zhǔn)網(wǎng)格板選取的紅外光圖像特征點(diǎn)如表3所示。
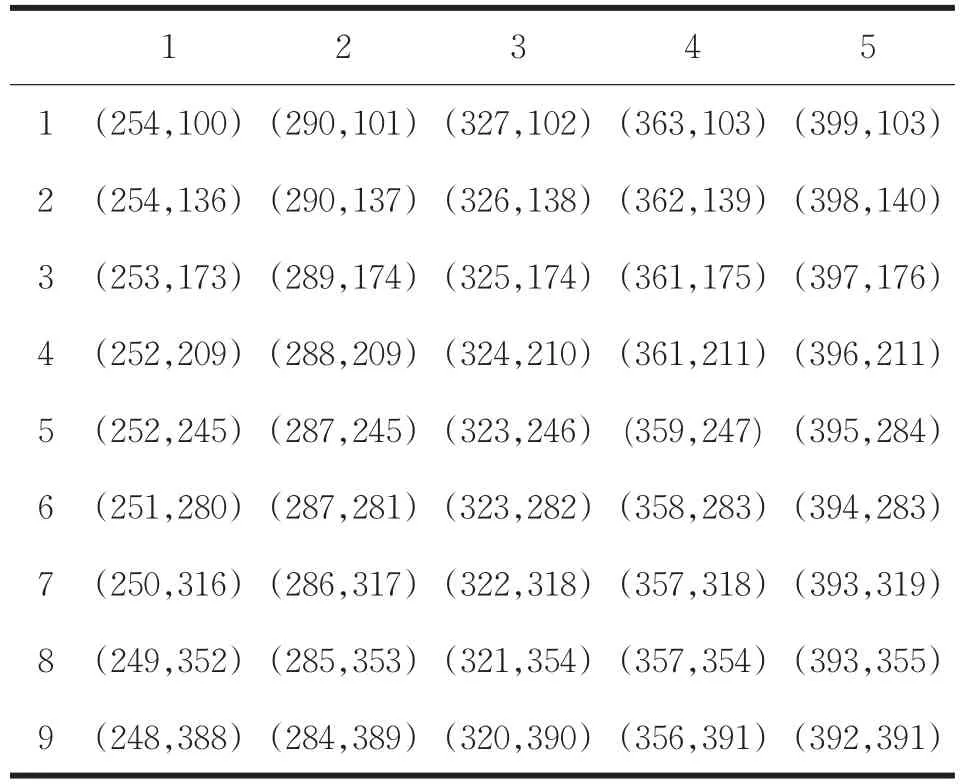
表3 紅外光圖像標(biāo)準(zhǔn)網(wǎng)格板特征點(diǎn)
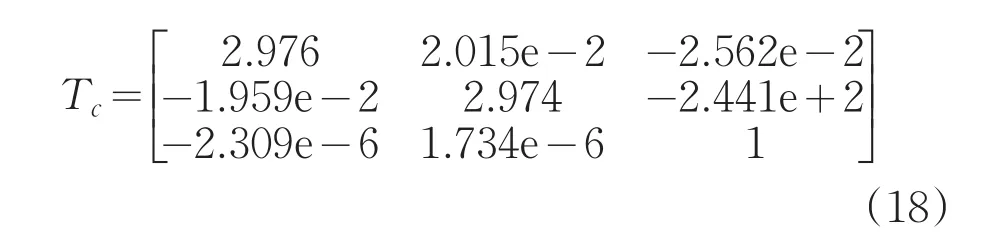
由兩幅標(biāo)準(zhǔn)網(wǎng)格板采集到特征點(diǎn)計(jì)算到的坐標(biāo)變換矩陣為:
通過參數(shù)計(jì)算得出的理想靶板合作目標(biāo)坐標(biāo)點(diǎn)與識別得出畸變圖像靶板合作目標(biāo)點(diǎn)如表4所示。
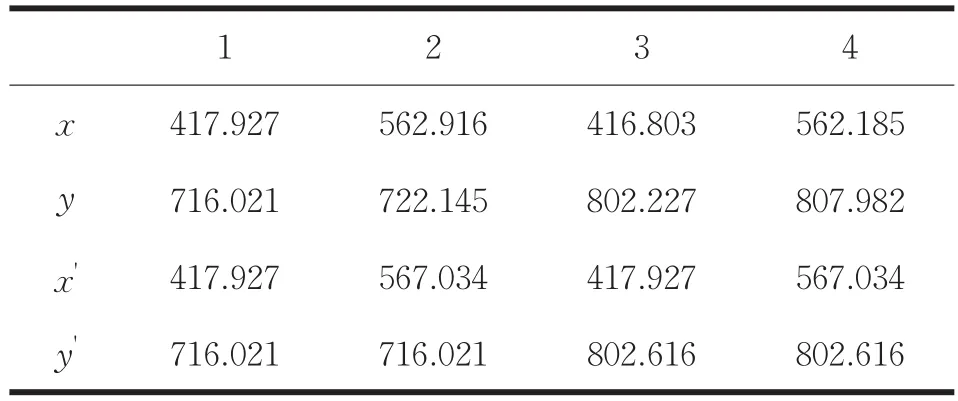
表4 靶板圖像畸變前后的合作目標(biāo)點(diǎn)坐標(biāo)
由這四對點(diǎn)計(jì)算出的可見光透視變換矩陣為:

通過公式(19)對可見光畸變圖像進(jìn)行透視畸變矯正,結(jié)果如圖8所示。

圖8 可見光圖像矯正結(jié)果
比較兩幅圖像可以看出,矯正前圖像中的圖像具有較大的畸變,在校正后的圖像上畸變得到了正確校正,說明該方法切實(shí)可行。
通過公式(16)計(jì)算出紅外光透視變換矩陣T3,通過上述公式對紅外光畸變圖像進(jìn)行透視畸變矯正,結(jié)果如圖9所示。
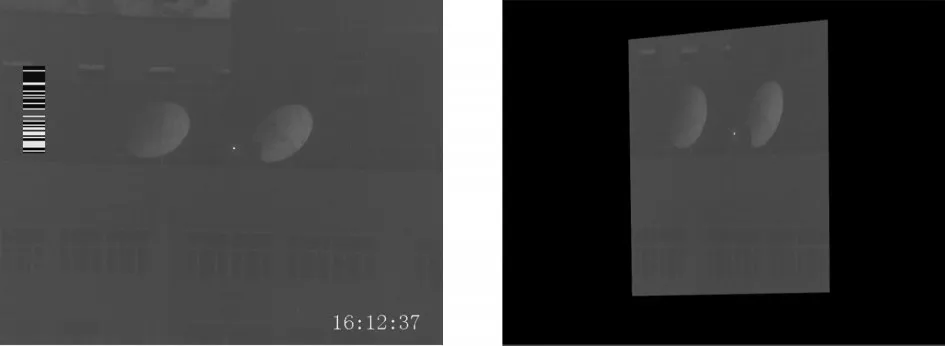
圖9 紅外光圖像矯正結(jié)果
比較兩幅圖像可以看出,校正前圖像中的圖像具有較大的畸變,在校正后的圖像上畸變得到了正確校正,說明該方法切實(shí)可行。
4 結(jié)論
本文提出的一種應(yīng)用于雙相機(jī)系統(tǒng)的圖像畸變矯正的方法,通過透視變換原理,對畸變的可見光圖像進(jìn)行有效矯正;采用標(biāo)準(zhǔn)網(wǎng)格板標(biāo)定,計(jì)算出空間坐標(biāo)變換矩陣,進(jìn)而實(shí)現(xiàn)對畸變的紅外光斑圖像的矯正。實(shí)驗(yàn)表明:該方法矯正速度快,效果好,能夠有效解決當(dāng)可見光相機(jī)與紅外光相機(jī)應(yīng)用于同一系統(tǒng)時(shí),對紅外光斑的矯正難題,在后續(xù)的測量中能夠有效的提高測量精度,減少因透視畸變引入的誤差。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32