基于ADAMS 的塔架軟剛臂單點系泊系統(tǒng)多自由度運動特性
2019-11-25 14:25:32胡勇,李慧,朱剛,李雷,李光
艦船科學技術 2019年10期
胡 勇,李 慧,朱 剛,李 雷,李 光
(武漢第二船舶設計研究所,湖北 武漢 430064)
0 引 言
單點系泊系統(tǒng)(Single Point Mooring System,SPM)是一種特殊的海洋工程裝備[1],主要作用是通過纜繩或特定結構將船舶系泊在一定的海域,同時使船舶可以繞系泊點作360°回轉,并且可以將船舶上的油、水、氣、電、信號等輸出至海底管線,或將其輸送至穿梭油輪。1958 年,由美國IMODCO 公司設計的第1 套懸鏈浮筒式單點系泊(CALM)系統(tǒng)在瑞典制造成功,該浮筒直徑4.5 m,由4 根錨鏈對稱固定,重60 t,可以系泊2 000 t 左右的艦船,用于軍艦的海上加油,揭開了單點系泊技術在海洋石油開采和海上原油中轉等領域上的應用的序幕[2]。
塔架式軟剛臂單點系泊系統(tǒng)是通過軟剛臂系統(tǒng)和固定塔架將船舶系泊于預定海域,在各種風浪流作用下受力最小,從而保證船舶在海上能長期連續(xù)工作。按照軟剛臂結構相對水面的位置分為水上軟剛臂和水下軟剛臂2 種主要類型[3],其中水上軟剛臂根據(jù)壓載艙型式的不同又分為橫向單壓載艙式、雙瓶型壓載艙式、雙箱型壓載艙式。本文研究的軟剛臂系泊系統(tǒng)是國家能源局批復的海洋核動力平臺示范工程項目的重要組成部分。
1 軟剛臂系泊系統(tǒng)
圖1 為軟剛臂單點系泊系統(tǒng)示意圖,其主要組成為軟剛臂系統(tǒng)、旋轉塔臺系統(tǒng)和導管架系統(tǒng)等。

圖 1 軟剛臂單點系泊系統(tǒng)示意圖Fig.1 Schematic diagram of the soft-arm single-point mooring system
軟剛臂YOKE 通過系泊軸承掛鉤與旋轉甲板相連,當船體縱搖運動時,它能圍繞掛鉤軸線上下轉動;當船體橫搖運動時,YOKE 通過自身發(fā)生扭轉運動,另外船體能通過軟剛臂系統(tǒng)實現(xiàn)風向標效應,繞著導管架轉動。 系泊腿下部通過萬向節(jié)與軟剛臂YOKE 連接,上部也是通過萬向節(jié)與系泊支架連接,上下兩端均通過銷軸能實現(xiàn)多自由度運動。
本文主要針對軟剛臂系統(tǒng)、系泊腿與船體支架、導管架系統(tǒng)之間的多自由度運動進行分析,有學者已經(jīng)針對船體縱向運動剛度曲線進行了研究,肖龍飛研究FPSO 的水動力發(fā)展,通過理論推導,計算軟剛臂系統(tǒng)的受力特性[4-5]。蘇方磊研究水上軟剛臂系統(tǒng)的水動力響應特性,進一步分析其縱向剛度特性[6]。軟剛臂系統(tǒng)的橫向運動剛度很少研究,本文通過船體縱向剛度曲線理論推導和試驗,驗證ADAMS 模型分析正確性,重點分析船體橫向運動時,軟剛臂YOKE 呈現(xiàn)空間扭轉變化,系統(tǒng)的剛度隨位移的變化以及各關節(jié)點的受力,同時也分析了船體與軟剛臂在極限位置時的碰撞情況,為示范工程單點系泊系統(tǒng)的設計提供理論支撐。
2 縱向運動時軟剛臂系統(tǒng)剛度理論計算
圖2 為軟剛臂與系泊腿的幾何關系與受力簡化圖,根據(jù)圖中幾何關系、力平衡和力矩平衡,可得到如下計算式:
軟剛臂系統(tǒng)水平X 向受力平衡

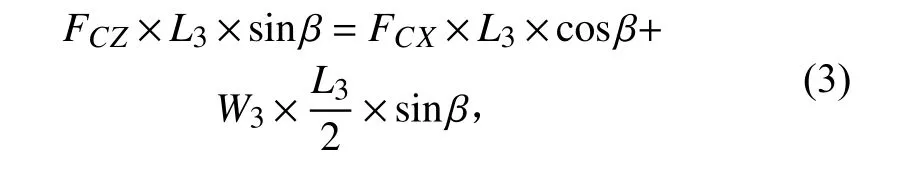
系統(tǒng)Z 方向受力平衡

系泊腿相對于B 點的力矩平衡

圖 2 軟剛臂單點系泊系統(tǒng)的幾何關系與受力Fig.2 Geometric relationship and force of the soft-arm single-point mooring system
軟剛臂系統(tǒng)對于A 點力矩平衡
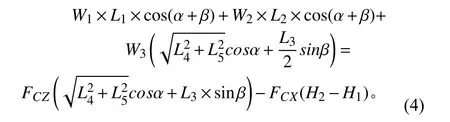
由式(3)和式(4)式得出:

平衡狀態(tài)下:

軟剛臂系統(tǒng)運動偏移距離:

通過上述關系等式,計算出C 點的水平回復力為:

系泊系統(tǒng)的剛度為特性曲線切線的斜率值,系統(tǒng)剛度隨曲線的變化而變化。當曲線為直線時,其系統(tǒng)剛度如下:

3 縱向運動時軟剛臂系統(tǒng)剛度驗證
本文以ADAMS 進行平臺與系泊系統(tǒng)的三維建模,并進行一定的簡化[7],如圖3 所示。
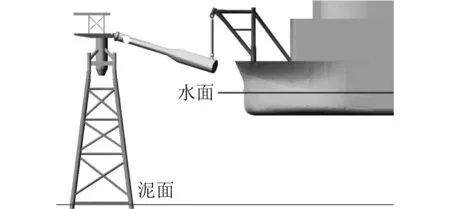
圖 3 ADAMS 三維分析模型Fig.3 Adams three-dimensional analysis model

表 1 軟剛臂系統(tǒng)主要構件參數(shù)Tab.1 Main component parameters of soft rigid arm system
導管架到旋轉塔臺之間采用固定約束,旋轉甲板與管匯甲板添加繞導管架主軸中心線的轉動副,軟剛臂YOKE 與旋轉甲板掛鉤處添加繞掛鉤中心線的轉動副,其系泊頭同時添加自轉的約束,系泊腿下部和上部萬向節(jié)分別與軟剛臂和系泊支架添加相應活動鉸接轉動副,能實現(xiàn)系泊腿多個方向的運動。通過仿真運動測試,整個系統(tǒng)能實現(xiàn)船體沿x,y,z 方向上的多自由度運動。分析過程中,縱向運動以平衡位置靠近導管架為負方向,遠離導管架為正方向;由于橫向運動具有對稱性,方向不影響分析結果。
由圖4 可知,通過對比船體縱向運動,理論公式推導的剛度曲線和試驗結果發(fā)現(xiàn),在相同的質點坐標和質心重量下,ADAMS 計算結果和理論公式推導結果是一樣的,剛度隨著平衡位置位移的增大,呈現(xiàn)增加趨勢,在遠離和靠近導管架8 m 以上,剛度出現(xiàn)陡增,這是因為軟剛臂分別處于水平拉直和豎向下垂的2 種極端狀態(tài)。這2 種結果和試驗結果存在一定的偏差,當船體靠近導管架6 m 以上和遠離10 m 以上時,計算結果值大于試驗值,在其他區(qū)域,兩者幾乎保持一致,這主要是由于水池試驗模型是按比例縮放,質心和理論會存在一定偏差,隨著縱向運動位移增大,這種偏差逐漸變得明顯。
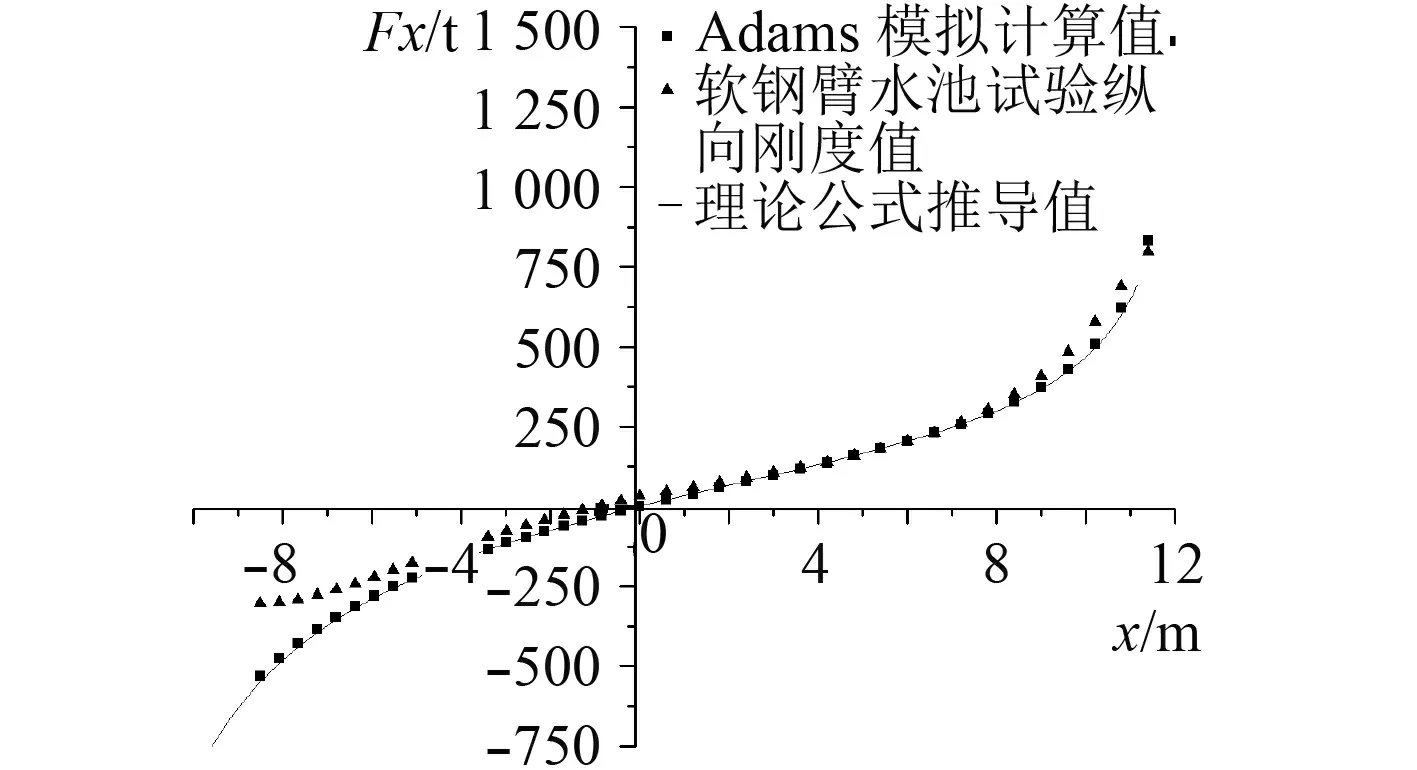
圖 4 船體縱向運動剛度曲線Fig.4 Longitudinal motion stiffness curve of hull
圖5 為ADAMS 模擬船體縱向運動時,旋轉塔臺所受FZ(如圖2 中a 點FAZ方向)方向力和系泊腿張力,由于2 條系泊腿在船體縱向運動時,呈平行運動,關節(jié)角度變化一致,受力完全一樣,從靠近導管架到平衡位置,張力從大變小;從平衡位置到遠離導管架,張力從小變大,方向均為正值。在FZ方向上,靠近導管架,旋轉塔臺受拉,方向向上;在平衡位置受壓,方向向下;遠離導管架,塔臺受拉,方向向上。
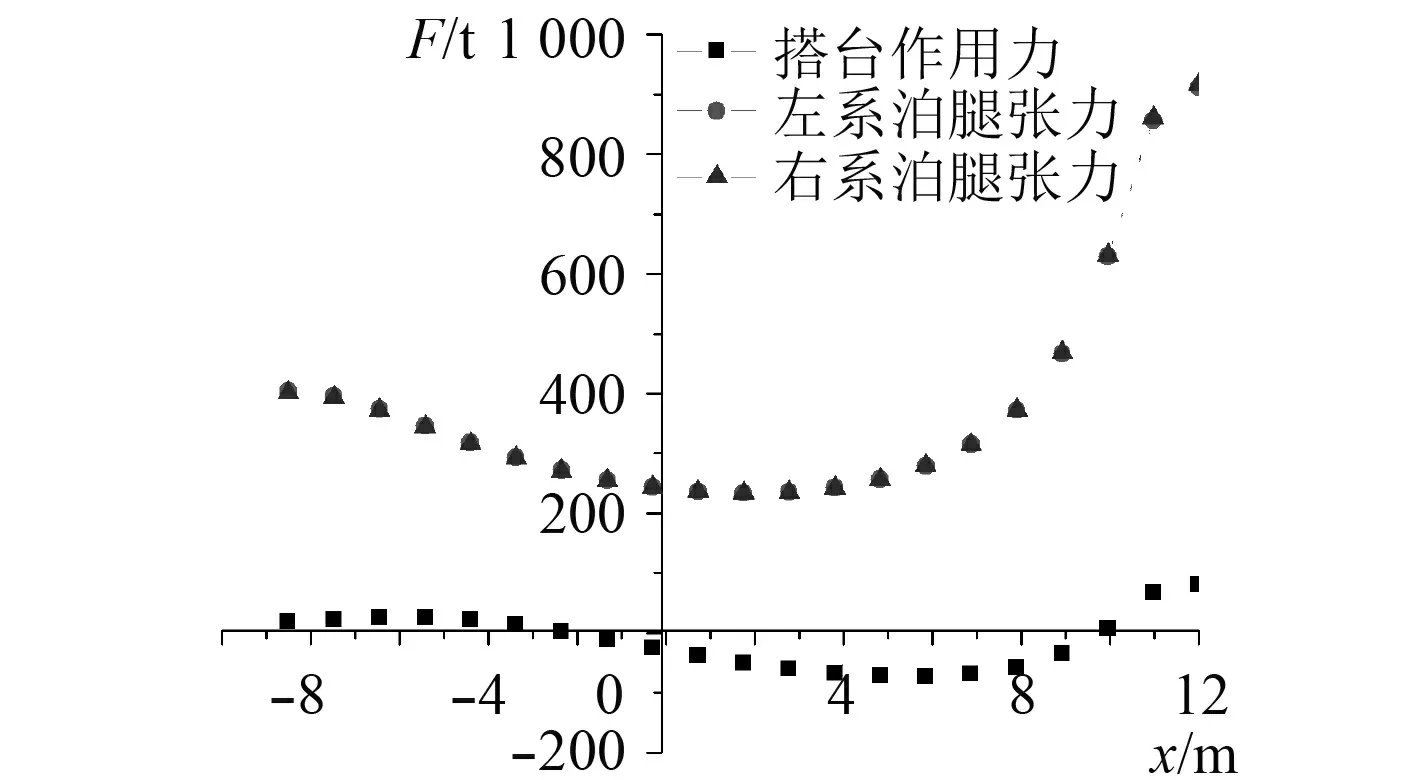
圖 5 船體縱向運動時塔臺作用力及系泊腿張力Fig.5 Tower force and mooring leg tension during longitudinal movement of the hull
4 船體橫向運動時軟剛臂系統(tǒng)分析
4.1 橫向運動剛度曲線
圖6 為船體橫向運動時,系泊腿的恢復力和軟剛臂系統(tǒng)的剛度曲線,由于軟剛臂系統(tǒng)在橫向運動時,依靠2 條系泊腿來提供恢復力,所以軟剛臂系統(tǒng)的剛度為2 條系泊腿恢復力之和。軟剛臂系統(tǒng)的剛度隨著橫向運動位移的增加而增加,變化趨勢和縱向運動時一致。相同位移下,其幅值小于縱向時的剛度,橫向運動10 m 時,其剛度值為81.17 t 的力,遠小于縱向運動10 m 時的剛度。另外2 條系泊腿的剛度也不相同,沿正方向運動時,左系泊腿的恢復力接近為右系泊腿恢復力的2 倍,變化趨勢是一致的。

圖 6 船體橫向運動剛度曲線Fig.6 Hull lateral motion stiffness curve
4.2 橫向運動系泊腿張力和塔臺作用力
圖7 為船體橫向運動時,旋轉塔臺承受的作用力和系泊腿的張力,從圖中可以看出,曲線在平衡位置兩端呈現(xiàn)對稱分布。從橫向運動正方向上看,左右2 條系泊腿的張力并不相同,主要由于隨著船體運動位移的增加,2 條系泊腿的姿態(tài)也不相同,左系泊腿隨著軟剛臂自轉,出現(xiàn)向上翹起,張力大于右系泊腿,反向運動時,右系泊腿張力大于左系泊腿。旋轉塔臺在FZ方向上始終是負值,方向向下,變化比較平穩(wěn),這是由于橫向運動時,軟剛臂一直處于下垂狀態(tài),不同于縱向運動時被拉直和下垂向上頂?shù)臉O端狀態(tài)。

圖 7 船體橫向運動時塔臺作用力及系泊腿張力Fig.7 Tower force and mooring leg tension when the hull is moving laterally
4.3 軟剛臂系統(tǒng)角度變化
圖8 為船體橫向運動時,軟剛臂系統(tǒng)繞導管架中心軸線的轉角變化,系泊頭處橫搖角變化以及縱搖角變化(船體橫搖和縱搖產生的角度,在船體橫向平動時,這2 個角度也發(fā)生相應變化)。可以看出,船體橫向位移增加,軟剛臂自轉角度較大,增大至22.3°后趨于穩(wěn)定,說明船體運動接近極限位置,縱搖角度值較小,最大為1.5°,橫搖角度數(shù)值略微大于縱搖角度。

圖 8 船體橫向運動時軟剛臂角度變化Fig.8 Angle change of soft rigid arm when the hull moves laterally
4.4 軟剛臂系統(tǒng)與船體甲板的碰撞
由圖9 可知,當船體靠近導管架時,隨著距離的靠近,軟剛臂與船體很容易發(fā)生碰撞,針對單點系統(tǒng)模型進行分析。
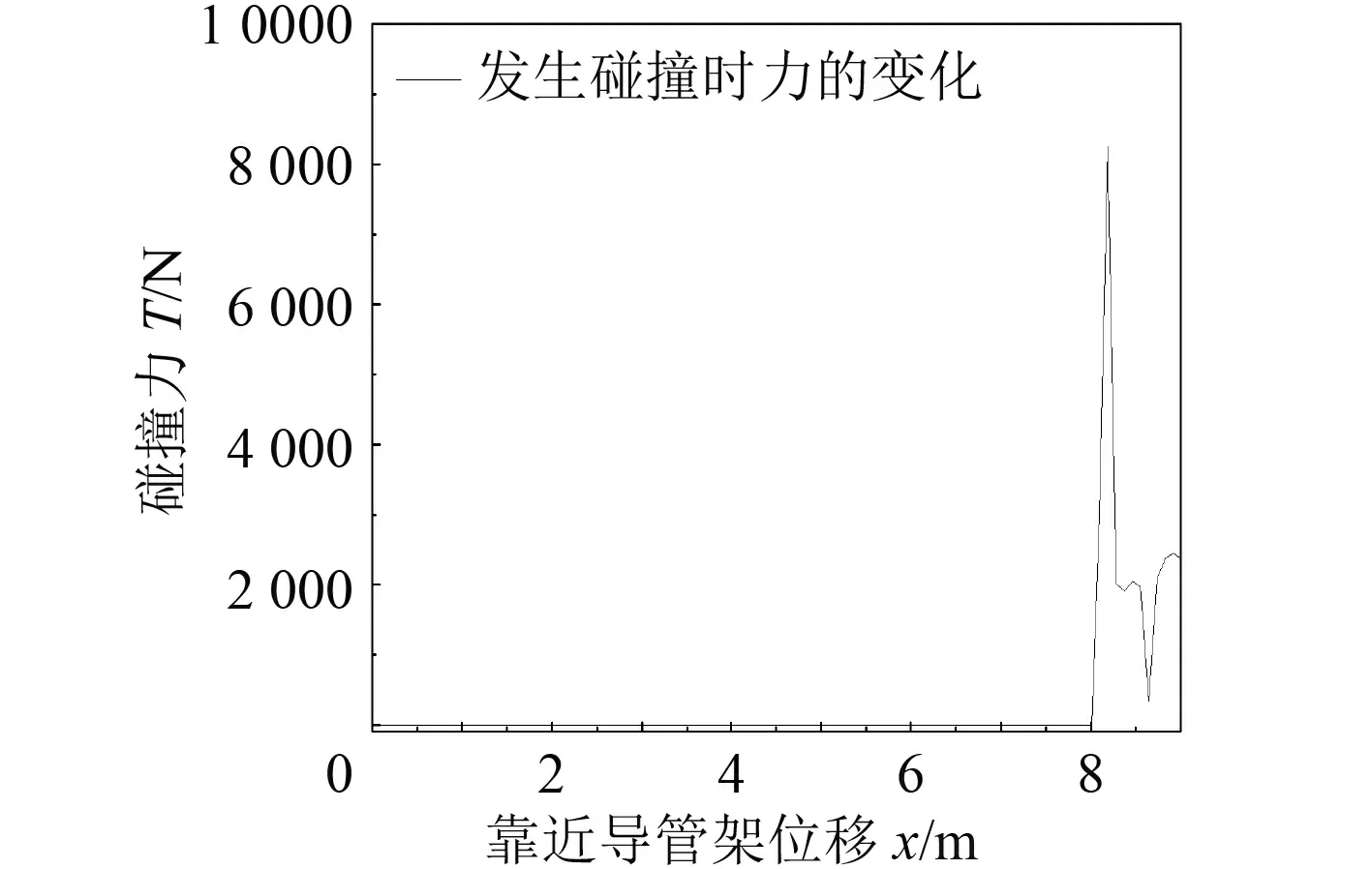
圖 9 船體縱向運動靠近導管架時與軟剛臂碰撞分析Fig.9 Collision analysis between the soft rigid arm and the jacket when the longitudinal movement of the hull
船體縱向運動靠近距離為8.19 m 時,軟剛臂與船首甲板會發(fā)生碰撞[8,9],其碰撞力達到8 251 N,表2 為接觸碰撞參數(shù)設置。若船體存在一定的沖擊速度,碰撞力也會相應變大;當碰撞造成材料塑性變形或者破壞時,其碰撞力會逐漸變小,逐漸趨于穩(wěn)定。碰撞分析有利于前期設計的優(yōu)化,通過模型參數(shù)的調整或者有效的措施來避免發(fā)生碰撞破壞。

表 2 接觸碰撞參數(shù)設置Tab.2 Contact collision parameter settings
5 結 語
本文采用ADAMS 對單點系泊軟剛臂系統(tǒng)進行多自由度運動分析,船體縱向運動時,通過軟剛臂系統(tǒng)剛度理論推導和水池試驗值,驗證軟件計算模型和計算結果的準確性。進一步分析討論船體橫向運動,軟剛臂系統(tǒng)的剛度、受力以及碰撞等運動分析,得出以下結論:
1)船體橫向運動時,軟剛臂系統(tǒng)的剛度呈遞增的趨勢,和縱向運動時一致,當橫向運動Y=10 m 時,F(xiàn)Y=81.17 t,數(shù)值上小于相同位移的縱向運動剛度。2 條系泊腿的恢復力也不相同,沿正方向運動時,左系泊腿的恢復力接近為右系泊腿恢復力的2 倍。
2)橫向運動系泊腿張力和塔臺作用力與縱向運動時也不相同,主要由于隨著船體正向運動位移的增加,2 條系泊腿的姿態(tài)逐漸不相同,左系泊腿隨著軟剛臂自轉,出現(xiàn)向上翹起,張力大于右系泊腿。
3)當船體橫向運動時,軟剛臂系統(tǒng)繞導管架中心軸線的轉角變化、橫搖角和縱搖角度也發(fā)生一定的變化,軟剛臂自轉角度變大,增大至22.3°后趨于穩(wěn)定,說明船體運動接近極限位置,縱搖角度值較小,最大為1.5°。
4)通過碰撞分析發(fā)現(xiàn),當船體靠近導管架8.19 m時,軟剛臂與船首甲板發(fā)生碰撞,其碰撞力達到8 251 N,當碰撞造成材料塑性變形或者破壞時,其碰撞力會逐漸變小,這有利于單點系泊系統(tǒng)前期設計的優(yōu)化。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34