圓臺陣近場目標(biāo)三維空間被動定位性能研究
2019-11-25 14:25:44李昆鵬康春玉夏志軍郭德鑫
艦船科學(xué)技術(shù) 2019年10期
關(guān)鍵詞:信號
李昆鵬,康春玉,夏志軍,郭德鑫,張 億
(1.海軍大連艦艇學(xué)院學(xué)員五大隊(duì),遼寧 大連 116018;2.海軍大連艦艇學(xué)院水武與防化系,遼寧 大連 116018)
0 引 言
隨著各國海洋利益的不斷擴(kuò)展,水下安全形勢越來越復(fù)雜,水下目標(biāo)輻射噪聲級不斷降低,隱蔽性隨之增強(qiáng)。近場區(qū)域警戒和近海岸的港口防御等軍事需求越來越迫切。針對近場聲目標(biāo)定位問題,聚焦波束形成是常見的方法之一,其原理是根據(jù)目標(biāo)聲源到各個(gè)陣元曲率半徑不同,補(bǔ)償球面波傳播模型下的時(shí)延差。該時(shí)延差考慮的是聲源距離和方位的二維函數(shù),在掃描平面上對不同位置點(diǎn)進(jìn)行掃描,獲得該平面的聲強(qiáng)圖,當(dāng)掃描點(diǎn)與目標(biāo)位置重合時(shí),聚焦波束形成輸出會出現(xiàn)峰值,即可得到目標(biāo)的距離和方位。科研人員基于均勻線列陣,對近場聚焦波束形成方法展開了比較深入的研究,2012 年,陳歡等[1]提出了基于幅度補(bǔ)償?shù)闹本€陣近場聚焦波束形成方法,該方法有效提高了基陣對于低頻信號的空間分辨能力,并進(jìn)一步抑制了高頻信號的空間混疊,但是直線陣對目標(biāo)進(jìn)行方位估計(jì)時(shí)會出現(xiàn)方位模糊等問題針對小基陣的近場目標(biāo)定位問題,2014 年,陳泓宇等[2]提出了基于半圓陣的近場聚焦波束形成方法,通過仿真結(jié)果來看,半圓陣雖然克服了直線陣對目標(biāo)進(jìn)行方位估計(jì)時(shí)出現(xiàn)的“左右舷模糊” 問題,但是基于半圓陣的近場聚焦波束形成方法旁瓣級比較高,使得空間分辨率降低。從目前的研究情況來看,近場目標(biāo)的定位研究主要集中于方位估計(jì)或方位與俯仰角估計(jì),針對基于空間陣的目標(biāo)距離、方位、俯仰角三維同時(shí)定位需要進(jìn)行更深入的研究。研究也表明,定位性能與基陣的布設(shè)、定位的方法等都有比較大的關(guān)系,如何設(shè)計(jì)更合理的小尺寸基陣實(shí)現(xiàn)對近場目標(biāo)的準(zhǔn)確定位仍然是需要解決的問題。
本文提出圓臺陣設(shè)計(jì)的構(gòu)想,推導(dǎo)了圓臺陣的接收信號模型,提出了近場三維聲聚焦波束形成的實(shí)現(xiàn)框架,通過對切割球面上聚焦點(diǎn)的掃描,得到目標(biāo)方位角和俯仰角,再通過對不同掃描球面上最大輸出功率的比較得到目標(biāo)距離,從而實(shí)現(xiàn)了對近場目標(biāo)距離、方位角、俯仰角的估計(jì),并采用MVDR 波束形成方法仿真分析了圓臺陣陣型對目標(biāo)三維定位性能的影響,可為優(yōu)化圓臺陣的陣形設(shè)計(jì)提供一定支撐。
1 圓臺陣近場信號接收模型
如圖1 所示,圓臺陣由4 條線型子陣組成,每條子線陣的陣元數(shù)為 m, 則整個(gè)圓臺陣的總陣元數(shù)M = 4m。4 條線型子陣分別排列在圓臺陣的母線上,母線傾斜角度為 θz,單條子陣的長度為 d且陣元間距相等,圓臺上臺面的半徑為 l1,以圓臺上臺面圓心為參考點(diǎn)建立坐標(biāo)系,假設(shè)近場聲源 S 的位置為 ( r,θ,φ),其中 r表示聲源到參考點(diǎn)的距離, θ表示俯仰角, φ表示方位 角。 聲 源 S 到 第 k ( k = 1,2,...,4 ) 條子 陣 第 i個(gè)(i = 1,2,...,m )陣元的距離為rki。
圖 1 圓臺陣陣列模型Fig.1 Circular matrix array model
根據(jù)圖1 和幾何關(guān)系,運(yùn)用三角形余弦定理可得
第 k ( k = 1,2,...,4 )條子陣第 i 個(gè)陣元收到信號與參考點(diǎn)的時(shí)延差為:

則第 k ( k = 1,2,...,4 )條子陣第 i個(gè)陣元的接收信號可表示為:

表示為矩陣形式為:

式中: X(t)=[x11(t), x12(t),..., x4m(t)]T為圓臺陣接收數(shù)據(jù)矩陣; s(t) 為 目標(biāo)聲源信號,N(t)=[n11(t),n12(t),...,n4m(t)]T為噪聲干擾矩陣; A(r,θ,φ)為信號導(dǎo)向向量。經(jīng)推導(dǎo),導(dǎo)向矢量是目標(biāo)距離、方位角、俯仰角的三維函數(shù),如下式:
2 MVDR 三維聲聚焦波束形成原理
常規(guī)的聚焦波束形成,就是根據(jù)目標(biāo)噪聲源到各個(gè)陣元的聲傳播距離不同,補(bǔ)償球面波傳播模型下的時(shí)延差,再對補(bǔ)償后的陣元信號進(jìn)行加權(quán)、求和,其傳統(tǒng)方法的時(shí)延差是聲源距離和方位的二維函數(shù),在掃描平面上對不同位置點(diǎn)進(jìn)行掃描,獲得該平面的聲強(qiáng)圖,當(dāng)掃描點(diǎn)與目標(biāo)位置重合時(shí),聚焦波束形成輸出會出現(xiàn)峰值,即可得到目標(biāo)的距離和方位估計(jì)[3-4]。
本文在常規(guī)聚焦波束形成的基礎(chǔ)上,提出三維聲聚焦波束形成的實(shí)現(xiàn)框架,其基本原理如圖2 所示。

圖 2 三維聲聚焦波束形成原理Fig.2 The principle of three-dimensional acoustic focusing beamforming
首先,將三維空間以參考點(diǎn)為中心,以搜索目標(biāo)的距離范圍將搜索空間切割為 Q個(gè)掃描球面,對每一個(gè)掃描球面 rq再 以1°為間隔,將掃描球面 rq按俯仰角劃分為181 個(gè)掃描點(diǎn),方位角劃分為361 個(gè)掃描點(diǎn),如圖3 所示。
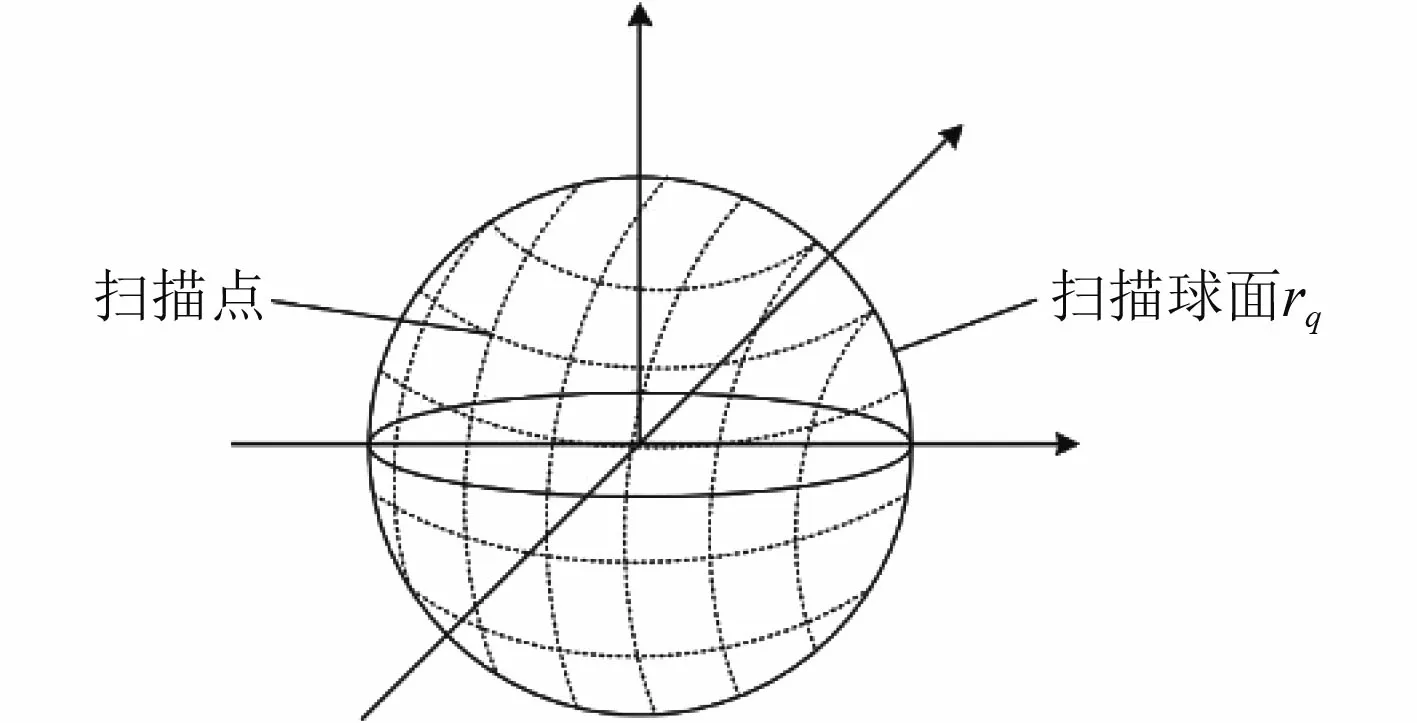
圖 3 掃描球面Fig.3 Scanning sphere
對 rq(掃描球面距參考點(diǎn)的距離)球面上掃描點(diǎn)進(jìn)行波束形成,可得到波束輸出為:

相應(yīng) rq球面上各個(gè)掃描點(diǎn)的輸出功率為:

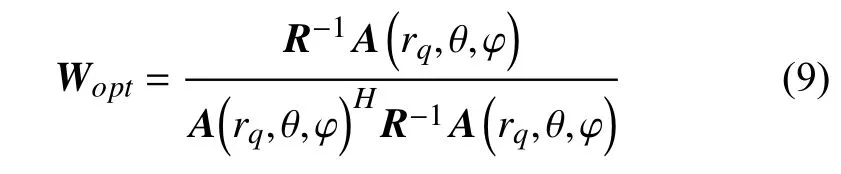
本文采用最小方差無失真響應(yīng)(MVDR)波束形成方法實(shí)現(xiàn)入射位置處信號的輸出功率不變,使掃描空間其他位置點(diǎn)的信號輸出功率最小。在近場條件下,MVDR 三維聲聚焦波束形成可以轉(zhuǎn)化為求解如式(8)所示的優(yōu)化問題[5-9]。
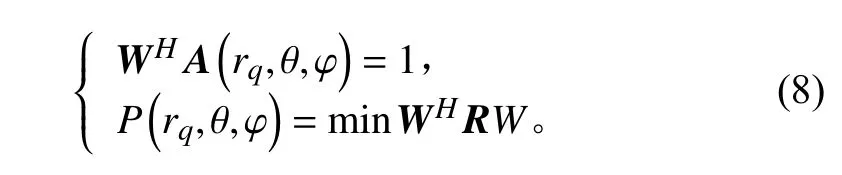
相應(yīng) rq球面上的空間譜為:

利用上式,代入不同的 ( θ,φ), 其中 θ = ?90°~90°,φ = 0°~360°, 就可掃描出 rq球面上最大輸出功率,然后通過掃描不同球面 rq,得到每個(gè)球面的最大輸出功率,通過比較不同球面的最大輸出功率,得到輸出功率的最大值 Pmax,其所對應(yīng)的球面距離即為目標(biāo)聲源的估計(jì)距離r,同時(shí)此球面上出現(xiàn)最大輸出功率的掃描點(diǎn)所對應(yīng)的角度即為目標(biāo)聲源的方位角和俯仰角。
3 仿真數(shù)據(jù)檢驗(yàn)與分析
仿真驗(yàn)證中假設(shè)單條線陣長度 d 固定為3 m,每條子陣上的陣元數(shù)為30 個(gè)且均勻分布,圓臺陣上底半徑l1為 1.5 m,信號采樣頻率 fs為12.5 kHz,快拍數(shù)為4 096,信噪比 S NR設(shè) 為 5 dB ,聲傳播速度 c 為1 500 m/s。每次仿真實(shí)驗(yàn)都進(jìn)行100 次蒙特卡羅實(shí)驗(yàn)。
3.1 母線傾斜角度對測距性能的影響
實(shí)驗(yàn)1:假設(shè)目標(biāo)俯仰角為 5°,方位角為 9 0°,目標(biāo)為頻率 500 Hz的單頻率信號,單條線陣陣元數(shù)為30 個(gè),母線傾斜角度從 0°變 化到 9 0°,目標(biāo)距離從500 m直線變化到2 000 m,即圓臺陣從平面陣變化到圓柱陣時(shí)目標(biāo)距離估計(jì)相對誤差的三維和二維圖如圖4所示。
從圖4 可以看出,圓臺陣的母線傾斜角度對不同距離目標(biāo)下的距離估計(jì)誤差影響比較大,總的來看,傾斜角度值越小,由于此時(shí)陣越接近平面陣,相當(dāng)于孔徑變大,使得同一距離目標(biāo)的距離估計(jì)越準(zhǔn)確,也就是當(dāng)4 個(gè)線陣接近于同一平面時(shí),測距性能越好。另外,同一傾斜角度值下,目標(biāo)距離越遠(yuǎn),距離估計(jì)誤差越大。同時(shí)通過取值分析可以得到,當(dāng)母線傾斜角度小于 30°時(shí),2 000 m 范圍內(nèi)目標(biāo)的距離估計(jì)誤差均小于 2 0%。
實(shí)驗(yàn)2:假設(shè)目標(biāo)俯仰角為 5°,方位角為 9 0°,目標(biāo)距離為 2 000 m,單條線陣陣元數(shù)為30 個(gè),母線傾斜角度從 0°變化到 9 0°,目標(biāo)仍為單頻信號,頻率從500 Hz 到 1 500 Hz線性變化,即圓臺陣從平面陣變化到圓柱陣時(shí)不同頻率目標(biāo)的距離估計(jì)相對誤差的三維和二維圖如圖5 所示。
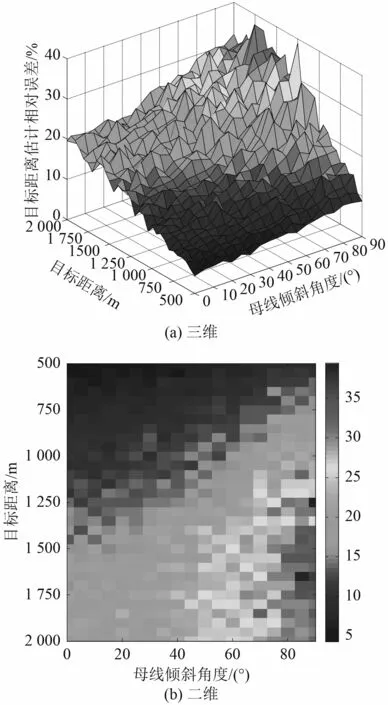
圖 4 不同母線傾斜角度、不同距離目標(biāo)下的目標(biāo)距離估計(jì)相對誤差Fig.4 Relative error of target distance estimation under different bus inclination angle and different target distance
從圖5 可以看出,圓臺陣的母線傾斜角度對不同頻率目標(biāo)下的距離估計(jì)誤差影響比較大,總的來看,傾斜角度值越小,由于此時(shí)陣越接近平面陣,相當(dāng)于孔徑變大,使得同一頻率目標(biāo)的距離估計(jì)越準(zhǔn)確,也就是當(dāng)4 個(gè)線陣接近于同一平面時(shí),測距性能越好,與仿真實(shí)驗(yàn)1 得到的結(jié)果一致。另外,同一傾斜角度值下,目標(biāo)信號頻率越高,距離估計(jì)誤差越小。同時(shí)通過取值分析可以看出, 當(dāng)頻率大于1 0 0 0 H z時(shí),目標(biāo)距離估計(jì)誤差可均小于 2 0%。
3.2 母線傾斜角度對聚焦空間分辨率的影響
聚焦空間分辨率即聚焦波束在半功率點(diǎn)處的波束寬度值,該值反映的是分辨2 個(gè)空間位置相近點(diǎn)聲源的能力,是衡量近場聚焦波束形成定位性能的重要指標(biāo)之一[10]。當(dāng)2 個(gè)聲源之間的角度差大于聚焦波束半功率點(diǎn)處時(shí)可分辨。60°2 000 m
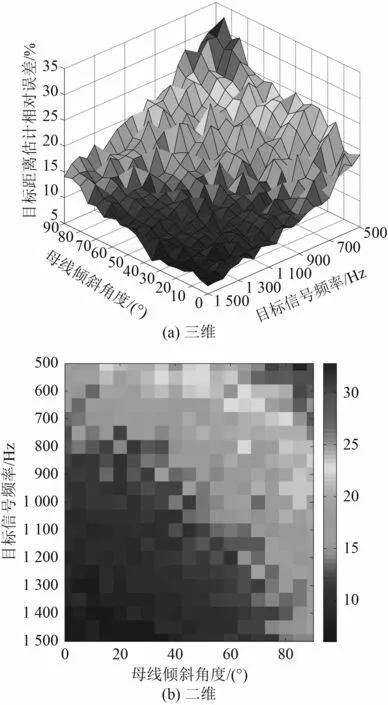
圖 5 不同母線傾斜角度、不同頻率目標(biāo)下的目標(biāo)距離估計(jì)相對誤差Fig.5 Relative error of target distance under different frequency targets with different bus inclination angles
實(shí)驗(yàn)1:假設(shè)目標(biāo)方位角為 ,距離為 ,信號為頻率 500 Hz 的單頻信號,單條線陣陣元數(shù)為30, 母線傾斜角度從 5°變化到 9 0°, 目標(biāo)俯仰角從?90°變 化到 9 0°,不同母線傾斜角度、不同俯仰角下的俯仰角聚焦空間分辨率如圖6 所示。
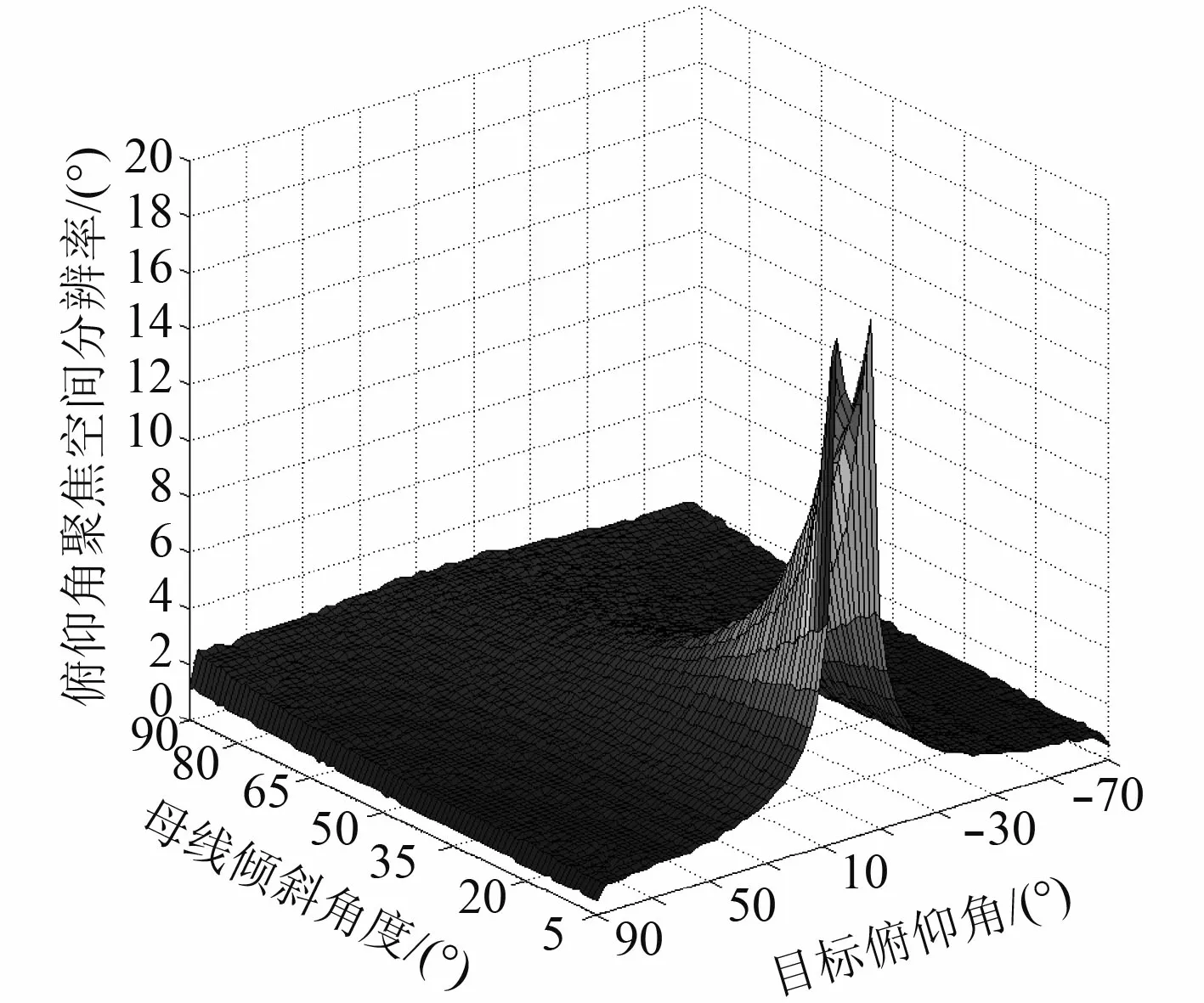
圖 6 不同母線傾斜角度、不同俯仰角下的俯仰角聚焦空間分辨率Fig.6 Focusing spatial resolution of pitch angle at different bus tilt angle and pitch angle
可以看到,當(dāng)圓臺陣母線傾斜角度較小時(shí),俯仰角在 ? 15°~15°范圍內(nèi)的目標(biāo),其俯仰角聚焦空間分辨率明顯差于其他位置,增大母線傾斜角度,即當(dāng)圓臺陣接近于圓柱陣時(shí)俯仰角聚焦空間分辨率可以得到明顯改善。也就是說,要想保證目標(biāo)俯仰角的估計(jì)精度,特別是要估計(jì)俯仰角在 ?15°~15°范圍內(nèi)的目標(biāo)時(shí),母線傾斜角必須增大。
實(shí)驗(yàn) 2:假設(shè)目標(biāo)俯仰角為 5°,距離為2 000 m,信號為頻率500 Hz 的單頻信號,單條線陣陣元數(shù)為30,母線傾斜角度從 5°變化到 9 0°,目標(biāo)方位角從 0°變化到 360°,不同母線傾斜角度、不同方位角下的目標(biāo)方位角聚焦空間分辨率如圖7 所示。
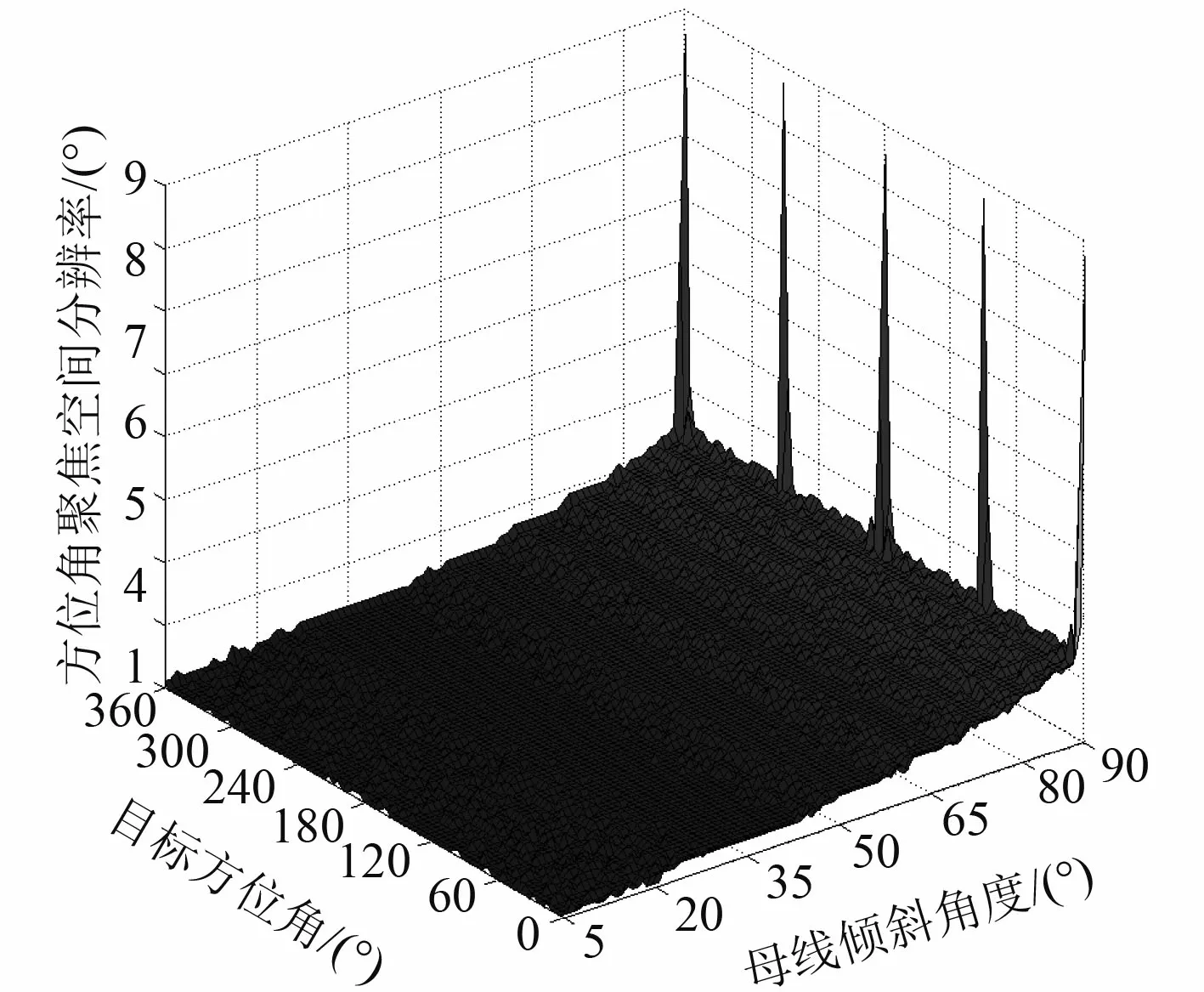
圖 7 不同母線傾斜角度、不同方位角下的目標(biāo)方位角聚焦空間分辨率Fig.7 Spatial resolution of target azimuth focusing at different bus tilt angle and azimuth angle
可以看出,母線傾斜角度越小,目標(biāo)方位角聚焦空間分辨率越高。同一母線傾斜角度下,不同方位目標(biāo)的聚焦空間分辨率基本相同。當(dāng)母線傾斜角度接近90°時(shí),位于4 個(gè)線陣所處方位附近的目標(biāo),由于目標(biāo)實(shí)際位置處和目標(biāo)鏡像位置處的聚焦峰發(fā)生混疊,造成聚焦峰顯著變寬,因此使得線陣附近的目標(biāo)方位角聚焦空間分辨率出現(xiàn)異常的情況。
實(shí)驗(yàn)3:假設(shè)目標(biāo)距離為2 000 m,俯仰角為 5°,方位角為 6 0°,單條線陣陣元數(shù)為30,母線傾斜角度從5°變化到 9 0°, 目標(biāo)仍為單頻信號, 頻率從500 Hz到1 500 Hz 線性變化,不同母線傾斜角度下,不同頻率目標(biāo)的俯仰角聚焦空間分辨率如圖8(a)所示,方位角聚焦空間分辨率如圖8(b)所示。
從圖8(a)可以看出,母線傾斜角度不變,信號頻率越高,俯仰角聚焦空間分辨率值越小,分辨目標(biāo)能力越強(qiáng)。信號頻率不變,母線傾斜角度越大,俯仰角聚焦空間分辨率值越大,分辨目標(biāo)能力越弱。
從圖8(b)可以看出,母線傾斜角度不變,信號頻率越高,方位角聚焦空間分辨率值越小,分辨目標(biāo)能力越強(qiáng)。信號頻率不變,母線傾斜角度越小,方位角聚焦空間分辨率值越小,分辨目標(biāo)能力越強(qiáng)。

圖 8 不同母線傾斜角度、不同頻率目標(biāo)下聚焦空間分辨率Fig.8 Different bus tilt angle and different frequency target focus spatial resolution
綜合圖6~圖8 可以看出,方位角聚焦空間分辨率明顯高于俯仰角聚焦空間分辨率,且無論母線傾斜角度等于多少,方位角聚焦空間分辨率均小于3o。但要想保證目標(biāo)俯仰角的估計(jì)精度,母線傾斜角必須增大,對于信號頻率為500 Hz 的目標(biāo)而言,要想保證俯仰角聚焦空間分辨率小于5o,母線傾斜角需要大于45o。
4 結(jié) 語
本文推導(dǎo)了圓臺陣近場信號接收模型和三維聲聚焦波束形成方法,研究了圓臺陣近場MVDR 三維聲聚焦波束形成被動定位的性能。從仿真數(shù)據(jù)分析發(fā)現(xiàn),母線傾斜角度對定位性能的影響比較大,母線傾斜角度越小,測距性能就越好,方位角空間分辨率就越高。但是對于俯仰角較低的目標(biāo)而言,母線傾斜角度越小,俯仰角空間分辨率就越差。要想保證目標(biāo)俯仰角的估計(jì)精度,母線傾斜角必須增大。也就是說,如果只要求目標(biāo)方位和距離估計(jì)性能,則圓臺陣可擺放成平面陣型,如果需要對目標(biāo)實(shí)現(xiàn)距離、方位、俯仰三維聲定位,則圓臺陣的母線傾斜角必須增大到合適的角度。對于中高頻目標(biāo)而言,當(dāng)指標(biāo)要求距離估計(jì)相對誤差10%,方位角和俯仰角誤差5o時(shí),母線傾斜角為 4 5°時(shí)即可滿足指標(biāo)要求。需要說明的是,本文仿真實(shí)驗(yàn)的目標(biāo)信號均為窄帶信號,對寬帶目標(biāo)信號的定位性能還有待進(jìn)一步分析驗(yàn)證。同時(shí),圓臺陣子陣條數(shù)、每條子陣的陣元個(gè)數(shù)與陣元間隔、圓臺陣上臺面的半徑等對定位性能的影響也需要進(jìn)一步研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06