一種基于實船試驗的風浪中艦船旋回運動要素辨識方法*
2019-11-28 03:09:36張煒靈
艦船電子工程 2019年11期
霍 龍 蔡 烽 王 驍 張煒靈
(海軍大連艦艇學院航海系 大連 116018)
1 引言
旋回運動性能是艦船操縱性的一項重要性能,通過實船試驗可以求出艦船的一系列旋回運動要素,如橫距、縱距、旋回直徑、戰術直徑等[1]。當前我國艦船設計常以靜水中的航行性能作為參數指標,然而大量實驗表明,水面艦船在風、浪中的航行性能與其在靜水中的航行性能有很大差別[2],直接影響艦船的航行安全。因此,準確測量風浪中的實船操縱性能尤為重要[3]。
2 風浪中艦船旋回要素辨識方法
2.1 實際海況對艦船操縱性的影響
艦船在實際海況中航行時,會受到風、浪和洋流等外部環境的影響和作用,導致艦船航向穩定性下降,甚至喪失保持理想航向的能力,產生旋回漂移、順浪尾橫等現象,影響艦船的航行安全[4]。
風對艦船的操縱性能會產生影響,當風速與航速比較大時更為顯著,不同風向會導致艦船航向不穩定[5];波浪對保持航向和艦船的操縱性也有顯著的影響,在波高較大時,艦船的穩性顯著下降,產生6自由度搖蕩,保持航向的能力顯著下降[6]。
流對操縱性的影響與風浪不同,艦船在流中的航跡是其自身運動和隨流漂移的合成運的結果[7]。所以,艦船通常可以用艦船與海水之間的相對速度來處理。開闊海域的局部表面流速度一般是穩定的,流速與流向接近常數。因此,如果流速較大并且較為穩定的條件下進行試驗,則應該剝離流的影響,修正試驗結果。
2.2 獲取洋流信息的方法
獲取流向流速信息主要有3種途徑。
第一種是通過查潮汐表和海圖上的潮流花來確定流向流速,這種方法獲取的流向流速信息是一個常數,在天氣條件較好,且試驗時間較短時相對可靠;
第二種是通過測波浮標測量海表面流和波浪信息,該方法所測得的海浪和海流信息精度較高,但成本較高,試驗開展相對復雜;
第三種是通過船載計程儀測出的對水速度與對地速度解算出的表面流信息,但實際試驗數據表明,由于對地速度是風浪流的綜合作用結果,該方法獲取的表面流信息數據波動較大,存在較大誤差。
本文采用第一種方法獲取的表面流的信息。
2.3 風浪中旋回運動要素辨識方法
開展本次實船旋回試驗完全按照國際慣用的《艦船操縱性試驗規程》[8~9]執行,選取右舵 15°和30°兩種舵角進行試驗,旋回運動要素如圖1所示。
在開闊海域中,由于萬噸以下艦船一次旋回歷時一般在10min以內,可以近似認為整個旋回過程的流速和流向是穩定的,通過矢量迭加的方法可以消除流對旋回軌跡的影響,從而對旋回軌跡的偏移進行修正。
以電羅經提供的航向HT為風浪中無流航向,并與由試驗或資料獲得的流向HF、流速VF、對地航速VC一同作為已知量,推算艦船在剝離流影響后純風浪中的航速VT為

采用航程積分法[10],根據每個時間點的羅經航和剝離流影響后的航速VT,通過式(2)、(3)可解算出艦船的實時方位坐標,利用梯形近似法可得到艦船旋回的樞心軌跡[11]。
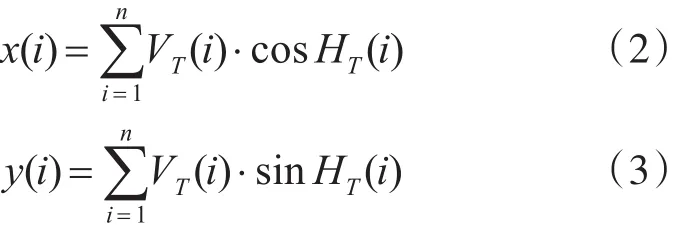
其中,x(i)和 y(i)是第i s時航行軌跡的x,y坐標,第HT(i)和VT(i)為第i s時的航向和航速,n為回轉試驗總時長(s)。
3 辨識旋回要素實例
3.1 實船試驗的基本情況
此次實船試驗于2018年4月17日早晨0630-0700在黃海長山群島附近海域,廣鹿島以南,獐子島以西的開闊海域進行。海面波高小于0.5m,有小涌,水深48m,流向34°,流速0.9節;氣溫8.6℃,氣壓1015hPa,相對濕度68%,平均風速5m/s,平均風向178°;試驗艦船長163.5m,寬22.2m,平均吃水5.9m,排水量約為9996t。試驗從0630開始,進行了兩車進二的15°舵角和30°舵角的試驗。
兩車進二,15°舵角試驗開始于0632,歷時867s。如圖2(a)所示,為實測的航向、航速曲線。將流進行矢量疊加之后,可得到如圖2(b)所示的艦船在純風浪中的航向、航速曲線。
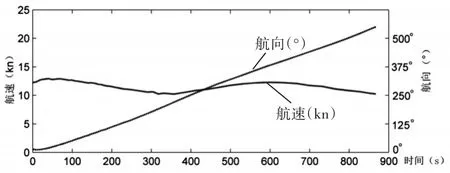
圖2 (a) 兩進二、15°舵角航速、航向

圖2 (b) 兩進二、15°舵角疊加流速后航速、航向
兩車進二,30°舵角試驗開始于0649,歷時610s。實測的航向、航速曲線和將流進行矢量疊加之后,艦船在純風浪中的航向、航速曲線分別如圖3(a)和圖 3(b)所示。
通過圖2(a)和圖2(b)及3(a)和3(b)的比較可以看出,將流進行矢量疊加以后,航向變化不大,而航速到某值后基本趨于穩定,這與理論上艦船在靜水中旋回特點更加接近,說明利用航程積分法疊加流描繪軌跡的方法是有效的。下面通過實際軌跡描繪來說明。
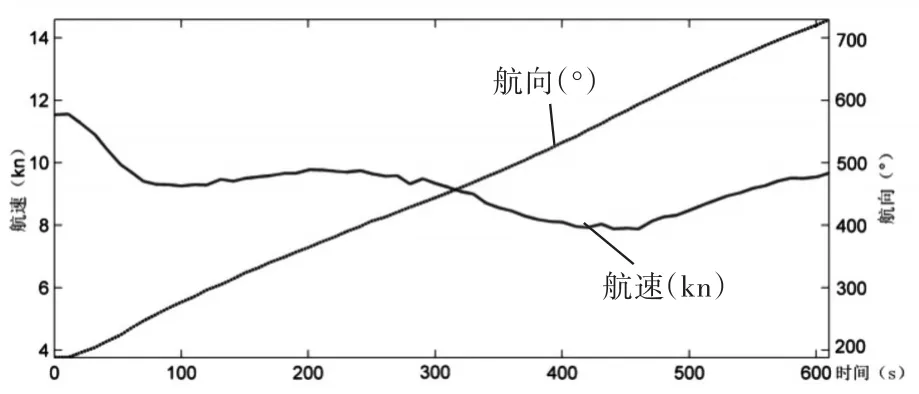
圖3 (a) 兩進二、30°舵角航速、航向
圖3 (b) 兩進二、30°舵角疊加流速后航速、航向
3.2 樞心軌跡描繪
將圖 2(a)和圖3(a)的數據進行內插處理后,利用Matlab繪圖可以得到圖4(a)和圖4(b)的旋回樞心軌跡[11]。
3.3 剝離流速影響后的樞心軌跡
通過2.3節介紹的方法,在剝離流速影響后,用Matlab繪制航行軌跡,得到如圖5(a)和圖5(b)所示的樞心軌跡。
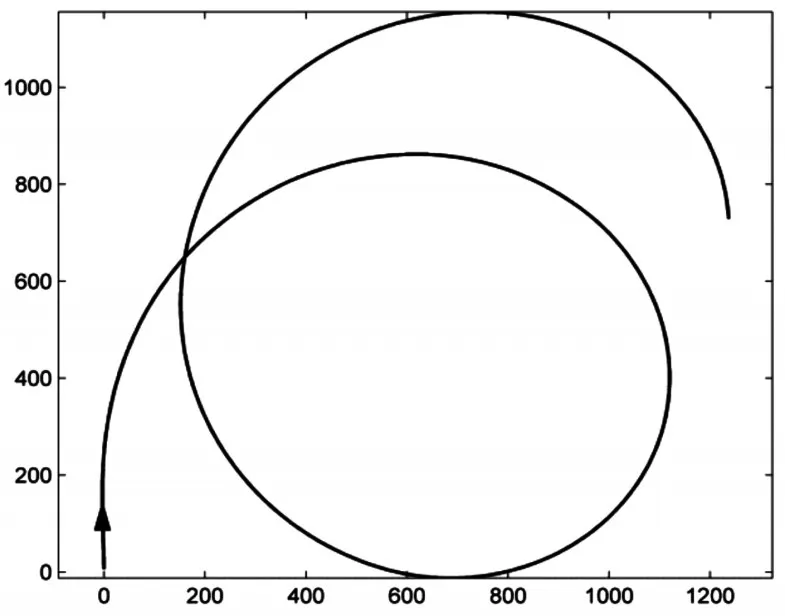
圖4 (a) 兩進二、15°舵角內插后的流中樞心軌跡
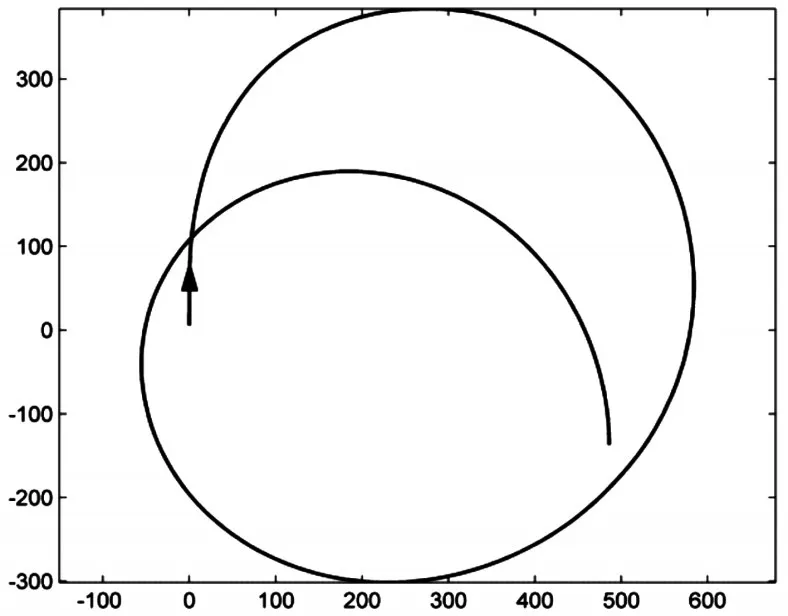
圖4 (b) 兩進二、30°舵角內插后的流中樞心軌跡
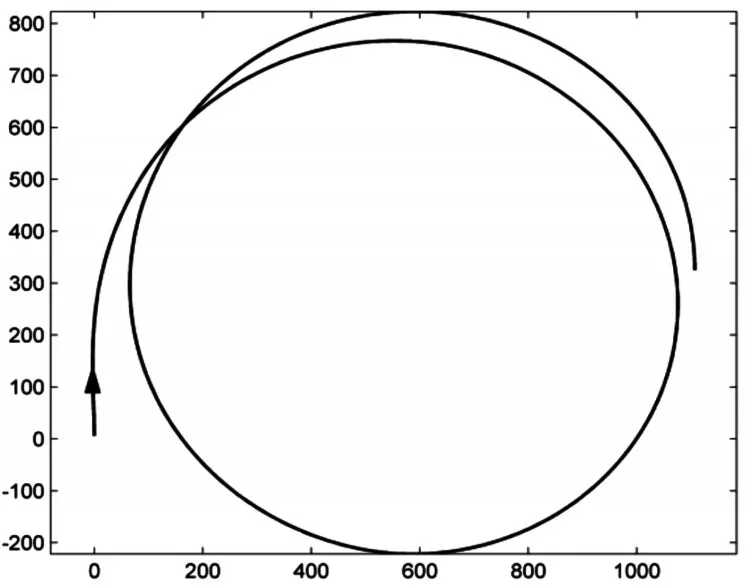
圖5 (a) 兩進二、15°舵角剝離流后的樞心軌跡
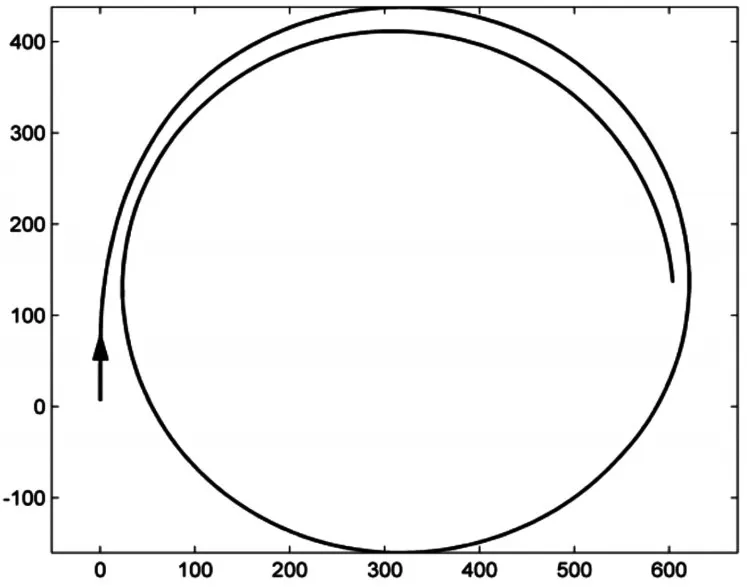
圖5 (b) 兩進二、30°舵角剝離流后的樞心軌跡
通過圖4(a)與5(a)以及4(b)與5(b)的對比可以看出,剝離流后的樞心軌跡非常接近理論上艦船在靜水中的旋回軌跡,這說明通過這種方法實現的軌跡描繪是合理的。
3.4 風對樞心軌跡的影響
艦船在航行中受風的影響,會邊向前航行邊向下風方向漂移。艦船在正橫受風時漂移速度可由式(4)表示[12]:

其中:V'為航行中風致漂移速度(m/s);Va為真風速(m/s);Ba為船體水線上側面積(m2);d 為艦船實際平均吃水(m);Lwl為水線面長度(m);V0為艦船航速(kn)。
本次實驗中,風速Va約為5m/s,試驗艦船的航速V0約為8~12節,平均吃水d為5.9m,水線長Lwl約為144m,水線以上側面積Ba約為2244 m2。
由式(1)求得正橫受風時,風致漂移速度V'為0.06m/s~0.11m/s之間,而在非橫風的情況下則要小于該值。風致漂移會對旋回的軌跡有一定影響,這也是導致剝離流影響后的旋回軌跡(圖5(a),5(b))雖然比流中旋回軌跡(圖4(a),4(b))更接近正圓,但與理論靜水旋回軌跡(圖1)仍有一定偏差的主要原因。由于風致漂移的速度遠小于流速,可判斷風對樞心旋回軌跡的影響遠小于流的影響。而艦艇旋回運動時的風致漂移速度是動態變化的,規律較為復雜,本文暫時未考慮剝離風的影響。
3.5 旋回運動要素辨識
根據水面艦船操縱性試驗開展的條件及要求[13]:試驗海區水深不小于艦船吃水的5倍,試驗海區要求開闊,沒有亂流,海水的密度和溫度不允許有階躍和明顯變化,試驗海域風力不超過蒲氏2級,海況不超過2級。
本次實船試驗開展的天氣及海況條件基本符合開展操縱性試驗的要求標準。但如果根據未剝離流的影響的試驗數據直接繪算,所得到的艦船旋回運動要素即被視為本艦船的旋回運動要素。如表1所示。
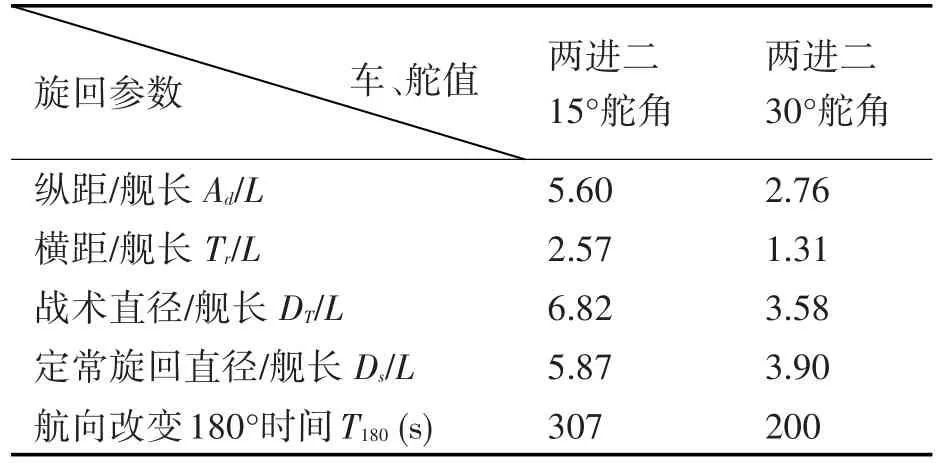
表1 流中旋回運動要素表
而根據本文提出的方法解算出該船在風浪中旋回的各項參數,如表2所示。

表2 靜水旋回運動要素表
從而得到實際海況中與風浪中旋回要素的差值,如表3所示。
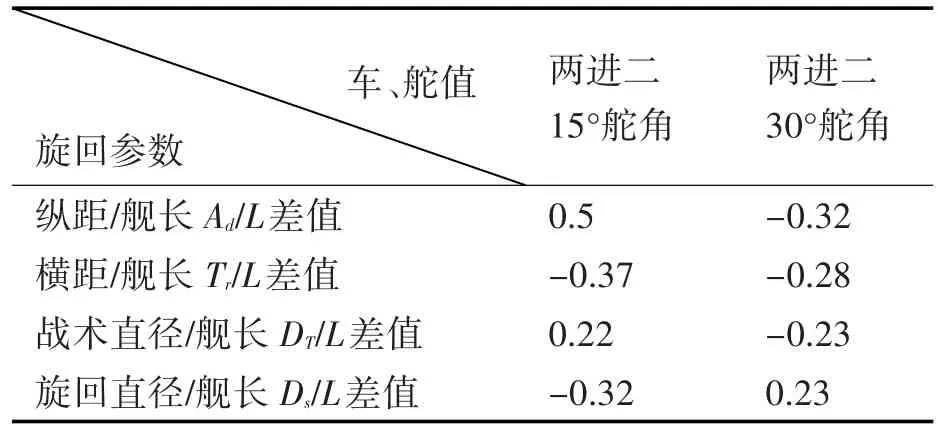
表3 流水與靜水中旋回運動要素差值表
4 結語
通過對比可以看出,艦船在流中的旋回要素相較靜水普遍存在0.2~0.5倍艦長的偏差,而且偏差值有正有負,這說明艦船在流中測出的旋回運動要素時大時小,呈現出不穩定的特點,不利于艦船操縱者準確掌握本船的操縱性能。
試驗結果表明,當航向、航速測量比較精確時,通過航程積分法描繪艦船旋回的樞心軌跡是可行的。通過內插,可以提高精度,并且通過矢量疊加法能夠剝離流對旋回的樞心軌跡的影響,從而得到艦船在靜水中的旋回樞心軌跡和重心軌跡。
由于實際開展實船操縱性試驗時,很難找到天氣、海況完全理想的試驗條件,因此,選取流速相對穩定的海域開展旋回試驗,并應用本文的方法剝離流對試驗的影響,從而辨識出艦船在風浪中的旋回運動要素,對操船者準確掌握本艦船旋回運動性能具有比較重要的參考價值。
