電子戰接收機測向測頻精度提高方法*
2019-11-28 03:09:44李東海
艦船電子工程 2019年11期
李東海
(91404部隊 秦皇島 066001)
1 引言
近幾年美國、俄羅斯參與的局部戰爭告訴我們,電子戰已成為關鍵的作戰手段。電子戰接收機能對敵方雷達進行情報收集,實現無源定位,以及對干擾機進行方位引導。對電子戰接收機而言,方位信息(AOA)及頻率信息(RF)是最重要的兩個參數[1]。
測量方位信息的方法有許多種。最簡單的方法是應用窄波束天線來搜索感興趣的方向,通過比幅度測量AOA;通過比相測量AOA;通過多卜勒頻移測量AOA;通過到達時間差測量AOA;通過多波束陣列和波束形成網絡測量AOA等[2]。其中比幅法和比相法是最普遍采用的測向方法。比幅法通過比較相鄰波束偵收信號幅度的相對大小來確定輻射源所在的方位,相位法通過相鄰天線通道測量同一個信號的相位差來確定輻射源的到達角。
多通道單脈沖比幅體制可瞬時測出單個脈沖的入射角度,其主要優點是瞬時帶寬極寬,截獲概率高[3],窄脈沖能力好,技術成熟,并且設備量少,易維護,成本低,其主要缺點是測向精度不如干涉儀和DBF(數字波束形成)。多波束體制的測向系統可以達到很高的測向精度,但體積較大成本也較高,使其應用范圍受到限制[4]。電掃描恒差比幅測向系統,能有效地減少了各通道間的不平衡并大大降低了成本,但由于方位不能參與信號分選,給信號分選帶來了很大的困難。
從電子戰裝備角度出發,研制一套成本價格低、適裝性好、性能優良的電子偵察設備,一直是各國研究的重要課題。現在,一種新型的寬張角恒波束喇叭天線的出現,使這一問題得到很好的解決[5]。本文設計的電子戰接收機系統中,選用比幅測向體制,應用這種新型的寬張角恒波束喇叭天線,以及相應的校正措施及解算方法,可將測向精度大大提高,能達到或接近多波束體制接收機的測向精度,而所需的波束數和設備量將大大減少。
同樣,頻率信息的獲取也有多種方法,有頻率搜索接收機、瞬時測頻接收機、信道化接收機等[6],瞬時測頻接收機的特點是技術成熟、設備量少,并在系統的寬開性、高精度、靈敏度和反應時間等方面都能滿足多種電子戰設備的要求。本文設計的電子戰接收機中,選用瞬時測頻技術,并將相關器、檢波器一體化,用大規模集成電路(FPGA)完成對視頻放大器的直流恢復和頻率碼解算,保證連續波測量功能,并將體積大大減小,僅為以往的瞬時測頻體積的30%,使其有更廣闊的應用范圍。
2 電子戰接收機測向精度提高方法
2.1 測向精度影響因素
影響電子戰接收機比幅測向精度有以下幾個主要因素。
一是天線方向圖特性。電子戰接收機系統為了有效地截獲雷達信號,一般都采用45°的線極化天線或圓極化天線,但事實上,定向接收天線在接收水平極化及垂直極化電磁波時波束寬度并不一致,造成交叉點偏移;在寬波段測角系統中,波束寬度會隨著工作頻率的變化而變化;同時,波束的傾斜角、饋源的極化及其軸比都隨工作頻率的變化而改變,它們都會引起測角誤差。
二是射頻通道失衡。除了天線之間的差異造成通道失衡,接收機有關電路也會引起通道失衡,如微波限幅器、微波濾波器的插損隨頻率、溫度變化的不一致性,微波射頻放大器的增益差異,檢波對數放大器的特性不僅和工作頻率、環境溫度有關,而且還和輸入功率有關,以及微波電纜的加工,這些因素會造成各通道間不平衡,除此以外,視頻電路也會引起失衡,如幅度量化引起的誤差等。
三是系統內部各電子元器件噪聲等。電子戰偵察接收機以往的比幅測向天線系統中,經常使用的寬波束天線單元為寬腔反射螺旋,遺憾的是此天線增益低(0~3dB),且波束寬度和波束點都隨頻率而變化,這使這種天線不適用很精確的方位測量。還有一種經常使用的寬帶線性口徑喇叭天線,對于多個波束如8、10或20個波束的測向系統,其恒波束性能依賴于口徑,且相位誤差隨頻率增加而增加,其應用受到了限制。
2.2 測向精度提高方法
本文設計的測向接收機中,采用一種全新的寬張角恒波束喇叭天線,這種天線波束恒定,在7.5GHz~18GHz,3dB波束寬度為23°±3°,對于水平接收與垂直接收,3dB波束寬度波動小于±1.5°。其一致性也很好,各個天線單元,在同一頻率點,3dB波束寬度變化在±1°之間,天線增益起伏小于等于1dB,這種性能優異的天線為設計高精度比幅測向接收機打下了堅實的基礎。
在本測向接收機中,高波段(7.5GHz~18GHz),采用12元比幅體制,可以達到2°(r.m.s)的測向精度。射頻部分由全向支路和定向支路組成,全向支路提供全向視頻信號和射頻信號,分別供視頻信號處理電路和瞬時測頻使用;定向支路有12個來自定向天線的射頻通道,供測向電路使用。
對于通道失衡,我們基于這樣的考慮:在同一溫度、同一頻率下,各通道間的失衡是固定的。因此,我們就可以測出這些差異,并最大限度的消除這些差異。
為此,本接收機采取了射頻通道兩次校正過程,如圖1所示。
各射頻通道的微波信號經檢波對放送A/D變換器進行幅度量化,首先進行第一次校正,這次校正根據各通道頻率及溫度特性逐點進行,希望將各通道間失衡減至最小。為此,首先要測試各個定向通道在各個頻率點的幅頻特性及溫度特性,分別進行補償,力爭做到歸一化。這是一項非常艱巨的工作,不僅要考察各個通道的微波器件的插損、增益的不一致性,還要考慮它們的溫度性能。若措施得當,可將各通道的增益調到一致,這是提高測向精度的一個關鍵。接下來進行主次天線的判別及計算幅度差,為提高系統的反應時間,這些工作由硬件完成解算,采用大規模集成電路,既滿足時間要求,又節省系統資源。
然后進行第二次校正。因為一般情況下,通常是用直線或曲線去擬合天線的方向圖,這帶來一定的誤差,為減小這一誤差,必須設計一套自動測試系統,分頻率點,在0~360°空域上采集各個定向支路的幅度信息,得到各個天線的方向圖,第二次校正的目的就是根據真實的天線方向圖解算方位碼,這種逐點校正技術是提高測向精度的又一關鍵。
小型化是測向接收機追求的另一個重要目標。小型化設備不僅可降低成本,而且適裝性好,可靠性高,為此,測向接收機中采用現場可編程邏輯陣列(FPGA)設計,FPGA的規模很大,適合于時序、組合等邏輯電路的應用場合,它可以替代成百上千塊通用IC芯片,FPGA實際上是一個系統部件,這種芯片具有可編程性和實現方案易改動的特點。在可編程邏輯陣列芯片及外圍電路保持不動的情況下,換一塊EPROM芯片就能實現一種新的功能,這就為系統擴展打下了良好的基礎。對本系統中,所有定向支路的校正及解算工作,都交給FPGA芯片完成。同時,為構成一個完整的接收機系統,我們對到達時間(TOA)和脈寬(PW)信息的提取及門限控制電路也作仔細的考慮。TOA和PW信息的提取及門限控制電路等數字處理部分也大量采用FPGA設計,大大減小了體積。
3 電子戰接收機測頻精度提高方法
3.1 瞬時測頻改進方向
數字式瞬時測頻接收機采用延遲線鑒頻器,能瞬時測出單個脈沖的頻率,瞬時帶寬寬、截獲概率高;且靈敏度較高,動態范圍大;可偵收連續波信號、脈壓信號和頻率捷變信號,其缺點是在任何一個瞬間只能響應一個信號,如果有兩個信號同時出現,就很難準確測量[7]。
DIFM接收機是一個相位測量系統,它建立在相位干涉原理上,將頻率信息轉換成相位變化信息,其中的微波鑒頻器將相位信息轉換成幅度信息[8]。對于相位差為θ的輸入信號,鑒頻器輸出是一組K(l±SINθ)和K(l±COSθ)信號(K為幅度),在實際應用中,有用信號是相位變化因子,其直流分量由后級的視頻運算放大器去除并經歸一化處理,產生移相量化電路所需的完全正交的±SINθ、±COSθ四路信號。
為使瞬時測頻接收機的應用范圍得到進一步擴展,我們努力減小瞬時測頻收機的體積和性能。為此,我們作了兩方面的努力:
第一,將微波鑒頻器和檢波器做成一個微波組件,這不僅使系統的體積大為縮小,而且使系統的可靠性得到提高,還降低了成本。
第二,采用FPGA設計和混合信號PCB設計技術,完成直流放大器零點漂移的控制;在移相量化電路中采用對稱電阻環,提高系統的抗噪能力。
3.2 消除連續波引起的零點漂移
如果輸入信號是一個連續波,那么視頻差分放大器就要處理直流信號,然而一般的直流放大器有嚴重的直流漂移問題,它將直接影響DIFM接收機的測頻精度,甚至使DIFM接收機無法正常工作。又考慮到DIFM接收機工作于高密集的信號環境,因此,適用于DIFM接收機的視頻放大器應該是帶自適應直流補償的極低漂移的寬帶直接耦合式的視頻差分放大器[9]。
減小零點漂移的一個常用方法是采用熱敏元件進行溫度補償,由于熱敏元件本身一致性差,公差范圍受到較大的限制,要得到精確的補償,放大器必須在不同的溫度下單獨進行校準和校驗,因此十分麻煩。雖然漂移電壓在室溫下很容易調整到很小的值,但要在寬的溫度范圍內進行補償要付出很大的努力。
本文采用直流電壓負反饋法解決零點漂移,電路由A/D、D/A、可編程邏輯器件組成,可在寬溫度范圍內解決零點漂移問題,具有體積小、調試簡單、便于生產的特點。
3.2.1 零點漂移的分析
我們知道,直流耦合放大器的零點漂移與環境有關,如溫度、電源電壓等。在我們使用的場合,這些因素的變化相對于瞬時測量而言,是一個極其緩慢的過程,因此可以采用定時恢復的方法消除放大器的零點漂移。
在DIFM接收機中,直流耦合差分放大器的前端是檢波器,它的輸入阻抗一般為幾百歐姆,這樣檢波器和直流耦合差分放大器之間的耦合所產生的零點漂移,可以認為主要是由失調電壓引起的,調整直流放大器輸入端的失調電壓,可以消除漂移帶來的誤差。
3.2.2 遮蔽時間的選取
為消除連續波的影響,測頻接收機需要一定的處理間隔和處理時間,稱之為遮蔽周期和遮蔽時間,這對脈沖信號的截獲及處理都有一定的影響。考慮到漂移的變化在短時間內是相當緩慢的,電流電壓一般在秒的數量級中不會有很大的變化,而溫度變化造成的直流漂移通常在分、秒的數量級;另一方面,考慮到后面信號分選處理器對遮蔽周期的要求,一般實際環境中單一信號分選需要十幾個脈沖,最大脈沖間隔約為幾十個ms。所以,遮蔽周期不應小于秒級,綜合其它因素,遮蔽周期定為10s左右較為合理。
遮蔽時間主要取決于器件的速度,時間越短越好。由于DIFM接收機開機時有較大的失調,實際工作時,接收機的直流恢復分為兩步。剛開機時,對系統進行較長時間的直流恢復,以消除初始狀態下的影響,然后每隔10s,恢復一次。遮蔽時間選為200ns,包括PIN開關上升、下降時間各30ns,比較器選通時間20ns,控制電路60ns,高速D/A轉換時間40ns,并留適當余量。
3.2.3 直流檢測與恢復電路
直流恢復電路系統示意圖如圖2所示。視放輸入為 l±SINθ或1±COSθ,雙端輸出為±SINθ或±COSθ,輸入信號既有差模信號,又有共模信號,采用雙端輸入、雙端輸出的差分放大器,能有效抑制共模信號。

圖2 恢復電路系統示意圖
直流恢復電路由微波開關、高速比較器、控制電路及D/A轉換器組成。比較電路主要用來檢測差分放大器的失調電壓,它由一個高速比較器構成,在一個遮蔽期內只產生一個比較脈沖,不是高電平就是低電平,控制后面的計數器增加或減少。當系統給出恢復指令時,控制微波開關,系統關閉射頻輸入信號,恢復電路根據比較器提供的比較電壓,由控制電路對可逆計數器進行記數,送給后面的D/A轉換器,給差分放大器的輸入端加上失調補償電壓,消除輸出端的漂移。
3.3 消除直流電位引起的相位偏置
3.3.1 直流耦合放大器的影響
在實際工作時,采用直流耦合放大器輸出的信號如圖3所示。

圖3 直流耦合放大器輸入輸出示意圖
采用上述直流恢復電路,可消除每對差分放大器兩個輸出端之間的直流電位差,但每個放大器輸出端的直流電位其實不是零電位,而是分別為A、B兩種直流電位,這將使后面的移相量化電路無法正常工作,以45°極性量化為例,
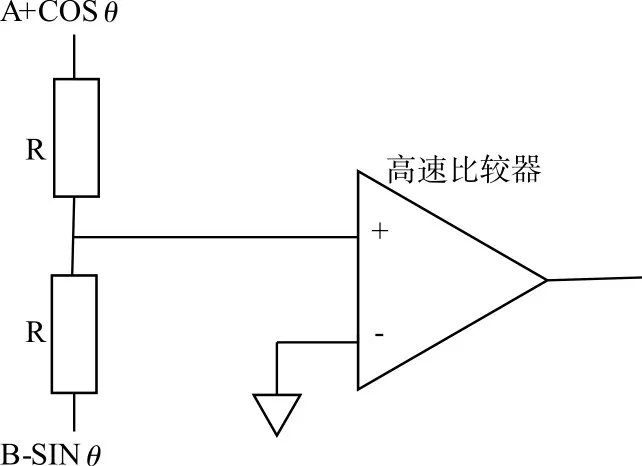
圖4 無對稱電阻環的移相量化電路
如圖4所示,高速比較器輸入端應為正弦電壓和余弦電壓組合產生的電壓COS(θ-45°),然而由于每個直流視放輸出端的直流電位各不相同,在圖4比較器的輸入端將無法得到COS(θ-45°)電壓信號。而是(A+B)/2+COS(θ-45°)/2電壓信號。
3.3.2 對稱電阻環的應用
本文設計采用對稱電阻環,通過矢量相加,將消除兩個直流電平的影響。在差分放大器之后的移相量化電路中,采用對稱電阻環可以簡化直流耦合放大器設計,并提高系統的抗噪能力,如圖5所示。

圖5 有對稱電阻環的移相量化電路
仍以45°極性量化為例,由圖5可計算出高速比較器的輸入端電壓為
V-=R/(R+R)*(A-COSθ-B-SINθ)+B+SINθ
=1/2*(A+B)-1/2*(COSθ-SINθ)
V+=R/(R+R)*(A+COSθ-B+SINθ)+B-SINθ
=1/2*(A+B)+1/2*(COSθ-SINθ)
1/2*(A+B)為共模電壓,則圖5高速比較器的輸出為COS(θ-45°)的量化代碼,兩對差分放大器輸出的直流電平通過對稱電阻環在比較器的輸入端被抵消。這使得直流恢復電路得以簡化。同時,由于高速比較器的兩個輸入端為正、負信號輸入比較,而不是信號過零比較,提高了整個系統的抗噪能力[10]。
整個瞬時測頻接收機電路,除比較器、D/A、電阻環等元件,其余包括解碼電路的數字信號處理部分全部交給FPGA完成,保證了體積的縮小。同時,設計這種混合信號電路的重點在于降低數字信號和模擬信號的相互干擾,對于這樣一個既有高增益視頻放大器,又有高速比較器和高速D/A的系統[11]。比較器的輸入很容易受到噪聲的干擾,要想將零點漂移降到最小,就必須降低系統噪聲,優化的PCB設計是控制零點漂移的關鍵[12]。
4 結語
本文設計的電子戰測向接收機,測向精度可達到2°(r.m.s),硬件包括測向、測寬、測到達時間以及門限和控制電路在內的電路部分,體積小于28cm×20cm×7cm;7.5GHz~18GHz瞬時測頻接收機,測頻精度為2.7MHz(r.m.s),整個測頻接收機包括微波組件在內,體積小于28cm×20cm×7cm。由此可見,此接收機不僅體積小,而且精度高,有較高的實用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
