飛機的垂直機動邊界性能研究*
2019-11-28 03:10:00陳柏松
艦船電子工程 2019年11期
關(guān)鍵詞:飛機
潘 軍 陳柏松 華 欣
(空軍航空大學(xué) 長春 130022)
1 引言
隨著實戰(zhàn)化訓(xùn)練的實施,常規(guī)訓(xùn)練已經(jīng)不能滿足現(xiàn)代空戰(zhàn)的要求。飛包線,飛邊界已經(jīng)成為飛行訓(xùn)練的常態(tài),這對飛行員掌握飛機的邊界性能提出了較高的要求。同時,垂直機動動作是一類可以迅速占領(lǐng)優(yōu)勢高度和優(yōu)勢機頭指向的機動動作,實戰(zhàn)意義重大。為此,本文利用Matlab/Simulink仿真平臺,以某型飛機為例,建立了垂直機動邊界性能的計算模型,運用數(shù)值計算方法,分析了半斤斗滾轉(zhuǎn)不同進入高度對應(yīng)的最小進入速度、半滾倒轉(zhuǎn)不同進入高度對應(yīng)的最大進入高度和半滾倒轉(zhuǎn)不同進入速度對應(yīng)的地面安全高度三類邊界性能指標(biāo),為開展飛行訓(xùn)練提供參考。
2 垂直機動模型的構(gòu)建
2.1 垂直機動的方程
飛機在做垂直機動動作時,認為運動平面和豎直方向夾角為0,不考慮飛行中的側(cè)滑,由此可得到飛機在垂直面內(nèi)的運動方程[1]為
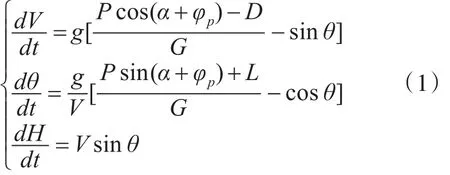
式(1)中,V表示飛機的飛行速度;P表示發(fā)動機的可用推力;g表示重力加速度;α表示飛機的飛行迎角;φP表示發(fā)動機安裝角;D表示飛機所受的阻力;G表示飛機重力;L表示升力;θ表示軌跡角;H表示高度。
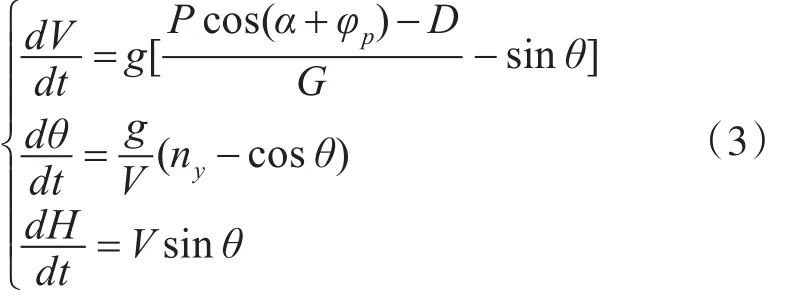
在垂直機動的過程中,通常都集中精力控制飛行過載來控制飛行軌跡,分析中取飛行過載為控制變量,由過載表達式[1]:

式(2)中,ny表示飛機的法向過載。
由此可以得到飛機垂直機動的計算模型為
2.2 大氣環(huán)境模型
1)標(biāo)準(zhǔn)海平面大氣參數(shù)

其中,T0表示標(biāo)準(zhǔn)狀況下海平面處氣溫;ρ0表示標(biāo)準(zhǔn)狀況下海平面處空氣密度;a0表示標(biāo)準(zhǔn)狀況下海平面處聲速。
2)高度H下的聲速、大氣密度和溫度
飛行高度H均在11000m以下,可以由如下計算公式[1],換算不同高度下的聲速、大氣密度和溫度。
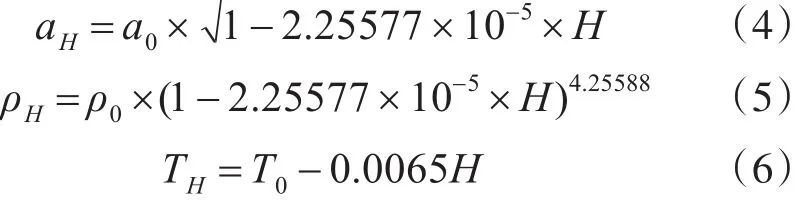
式(4)~(6)中,aH為 H 高度的聲速,ρH為 H高度的空氣密度,TH為H高度的溫度。
2.3 升力系數(shù)和阻力系數(shù)模型
升力系數(shù)和阻力系數(shù)是隨迎角、飛行馬赫數(shù)變化的函數(shù),結(jié)合飛行手冊中的氣動數(shù)據(jù),對數(shù)據(jù)進行多項式插值,可以得到升力系數(shù)和阻力系數(shù)隨迎角和飛行馬赫數(shù)的變化關(guān)系式:

式(7)~(8)中,Ma表示飛行馬赫數(shù);CL表示升力系數(shù);CD表示阻力系數(shù);f1表示升力系數(shù)的插值函數(shù);f2表示阻力系數(shù)的插值函數(shù)。
2.4 可用推力模型
發(fā)動機的可用推力主要受到飛行馬赫數(shù)、飛行高度、溫度這三類外界因素的影響。因此,根據(jù)手冊中提供的的發(fā)動機可用推力隨這三類因素變化的數(shù)據(jù)進行多項式插值,可以得到到相關(guān)狀態(tài)下推力的表達式:

式(9)中,f3表示發(fā)動機可用推力插值函數(shù)。
3 垂直機動數(shù)值計算方法
3.1 計算步驟
半斤斗滾轉(zhuǎn)的上升段是一個以動能換取勢能的過程,由于飛行速度不斷地減小,為了保持過載,迎角需要不斷增大。但是,迎角又不能無限增大,因為迎角過大有可能使飛機失速,所以,當(dāng)根據(jù)過載反推出的半斤斗滾轉(zhuǎn)上升段某一點迎角大于該點的抖動迎角時,只能以抖動迎角進行飛行。
飛行員以某一過載拉起,隨著高度上升,速度下降,為了保持規(guī)定過載,要不斷拉桿增大迎角,當(dāng)實際使用迎角大于抖動迎角時,則按照抖動迎角飛行。
當(dāng)α<α抖動:

式(10)中,f4為過載值的插值函數(shù)。
當(dāng)α>α抖動:

在式(11)中,CLα抖為抖動迎角 α抖對應(yīng)的升力系數(shù)。
半滾倒轉(zhuǎn)的下降段中,如果出現(xiàn)根據(jù)過載反推出的迎角大于抖動迎角的情況,最大迎角也只能使用抖動迎角飛行,迎角計算方式如式(10)~(11)。
相應(yīng)的計算步驟如下。
1)給定初始條件:
海平面溫度T=T0,各點處g=g0,斤斗運動進入的速度V0,高度H0。
2)數(shù)值計算:
(1)采用Matlab自帶的定步長龍格庫塔法ode4對式(3)進行數(shù)值積分,步長為0.01s。
(2)根據(jù)飛行高度H計算出該高度下的聲速aH,再計算出對應(yīng)的馬赫數(shù)Ma=V/aH。
(3)根據(jù)式(9)計算出推力P的大小。
(4)根據(jù)馬赫數(shù)Ma查到與之相對應(yīng)的抖動迎角α抖動,根據(jù)式(10)和(11)求出對應(yīng)的過載值。
(5)根據(jù)阻力系數(shù)的計算式(8),求出對應(yīng)的阻力D。
以上的步驟同時進行,就可以完成完整的數(shù)值積分過程。
3.2 垂直機動計算結(jié)果驗證
計算條件:某型飛機以干凈構(gòu)型進行半斤斗滾轉(zhuǎn)動作飛行,對半斤斗滾轉(zhuǎn)的上升段進行研究。上升過程中發(fā)動機處于最大工作狀態(tài),飛行質(zhì)量7300kg,按照手冊中給出的關(guān)鍵點過載設(shè)置對應(yīng)載荷,其余位置載荷使用按線性均勻變化得到。
給定計算條件后,使用本文建立的飛機垂直機動模型進行計算,計算結(jié)果和手冊數(shù)據(jù)的對比結(jié)果如表1。

表1 計算數(shù)據(jù)和手冊數(shù)據(jù)對比
根據(jù)表1知,給定相同的初始條件過載控制規(guī)律,本文模型計算出的結(jié)果略有偏差,分析其原因主要有三個方面:
1)本文的計算模型將飛機運動過程中飛行質(zhì)量視為常數(shù),但是飛行中由于燃油的消耗,質(zhì)量一直在減小,這就出現(xiàn)一定的質(zhì)量誤差。
2)半斤斗滾轉(zhuǎn)上升段中,由于計算得到的速度和手冊的速度存在差異,所以實際使用的迎角并不不完全相同,這也是造成高度誤差的原因之一。
3)本文給定的過載控制規(guī)律是根據(jù)幾個關(guān)鍵點確定的,線性均勻變化的結(jié)果會與實際情況存在偏差,同時由于不同發(fā)動機的推力也存在誤差,所以計算結(jié)果和手冊數(shù)據(jù)不可能完全相同。
但是,本文的計算結(jié)果和手冊數(shù)據(jù)比較接近,誤差較小,所以可以使用本文構(gòu)建的計算模型對某型飛機的垂直機動進行研究。
4 垂直機動邊界性能
為了更好地分析垂直機動的邊界性能,這里對垂直機動中的半斤斗滾轉(zhuǎn)和半滾倒轉(zhuǎn)兩類運動進行研究。半斤斗滾轉(zhuǎn)上升段中,發(fā)動機以最大狀態(tài)工作,飛機按給定的過載規(guī)律控制,飛機沿軌跡上升。半滾倒轉(zhuǎn)下降段中,發(fā)動機工作在相應(yīng)的典型工作狀態(tài),飛機也按給定的典型軌跡角下的過載進行取值。
4.1 半斤斗滾轉(zhuǎn)邊界性能
半斤斗滾轉(zhuǎn)的上升段是完成完整運動的基礎(chǔ),如果飛機無法滿足半斤斗滾轉(zhuǎn)的頂點速度要求,必然無法完成完整的半斤斗滾轉(zhuǎn)運動。
飛機沿著半斤斗滾轉(zhuǎn)上升段軌跡上升時,以速度換取高度,上升段是一個減速過程。飛機的速度不斷地減小,但是又不能過小,否則由于舵面偏角限制,操縱性會下降,因此頂點速度必須保持在某一規(guī)定值之上。操縱規(guī)律一定的情況下,半斤斗滾轉(zhuǎn)進入的高度和速度就要受到限制。所以,半斤斗滾轉(zhuǎn)運動的邊界性能可以用底邊高度和最小進入速度的關(guān)系表示。
計算條件:為了滿足飛機的機動性要求,半斤斗滾轉(zhuǎn)頂點的飛行速度不能小于該型機最小操縱速度要求,可以計算出斤斗運動不同底邊高度下進入速度的邊界值。
在半斤斗滾轉(zhuǎn)頂點最小操縱速度要求為表速不小于最小操縱表速V表min,表速的計算公式為

可以換算出對應(yīng)的頂點真速應(yīng)滿足如下關(guān)系:

參考文獻[2],為了更加貼近某型飛機的使用特點,以如下關(guān)鍵點作為過載控制規(guī)律ny=f(θ)的插值節(jié)點,其余位置用線性插值得到,對半斤斗滾轉(zhuǎn)邊界性能進行研究。
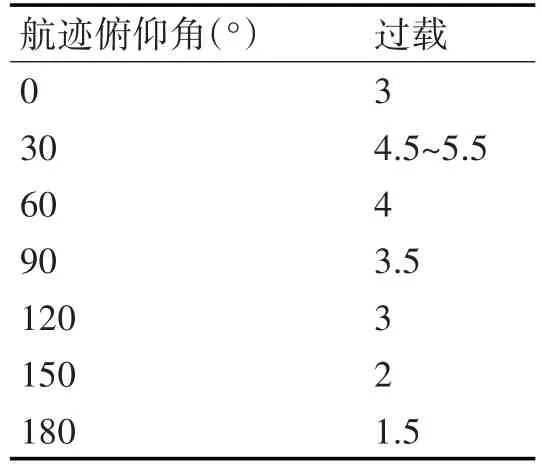
表2 半斤斗滾轉(zhuǎn)上升段不同俯仰角處的過載值
半斤斗滾轉(zhuǎn)上升段的速度損失和拉起過載有很大關(guān)系。如果半斤斗滾轉(zhuǎn)剛開始拉起時的過載大,誘導(dǎo)阻力也大,能量損失多,相應(yīng)頂點速度就會減小,所以拉起時的過載不能過大。但是半斤斗滾轉(zhuǎn)上升段的過載又不能過小,過載小會造成曲線運動半徑增大,完成半斤斗的運動增加,飛機上升高度多,重力勢能增加多,這也會造成頂點的速度小。為了得到更符合飛行實際的半斤斗滾轉(zhuǎn)邊界性能,必須考慮不同的過載控制規(guī)律。
航跡角30°是一個特殊的角度,該點選擇不同的過載會直接影響到半斤斗滾轉(zhuǎn)上升段的軌跡。對于某型飛機,航跡俯仰角30°處的過載可以取4.5、5或5.5。這里對30°俯仰角處的每一個過載值都進行進行邊界性能計算,求出不同高度下的最小進入速度,即可得到半斤斗滾轉(zhuǎn)的邊界性能。
在Matlab/Simulink仿真平臺中搭建相應(yīng)的計算框圖進行仿真計算,結(jié)果如圖1~2所示。
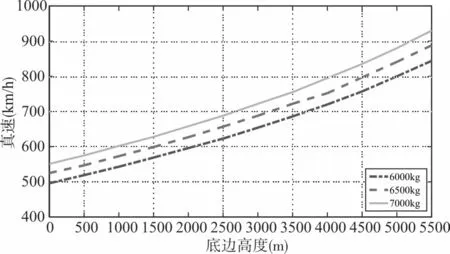
圖1 不同底邊高度的半斤斗滾轉(zhuǎn)最小進入表速

圖2 不同底邊高度的半斤斗滾轉(zhuǎn)最小進入真速
從計算結(jié)果可以看出,以飛行質(zhì)量6500kg為基準(zhǔn),斤斗底邊進入高度每增加1000m,最小進入表速增加約25km/h;斤斗底邊進入高度每增加1000m,最小進入真速增加約63km/h。飛行質(zhì)量每增加100kg,相同底邊高度上的進入表速增加約6km/h,進入真速增加約7km/h。
4.2 半滾倒轉(zhuǎn)邊界性能
半滾倒轉(zhuǎn)的運動情況不僅受過載規(guī)律的影響,還會受到發(fā)動機使用的影響。在半滾倒轉(zhuǎn)下降段中,發(fā)動機一般處于慢車狀態(tài)或者額定狀態(tài),慢車狀態(tài)下,飛機速度相對較小,旋轉(zhuǎn)角速度大,完成機動動作的時間較短,高度損失相對也較小;如果使用額定狀態(tài),飛機速度大,雖然完成機動動作的時間較長,但是飛機能量損失小,對占據(jù)空戰(zhàn)優(yōu)勢較為有利。為了更加貼近飛行實際,半滾倒轉(zhuǎn)下降段中,不同位置的發(fā)動機工作狀態(tài)如表3所示[2]。
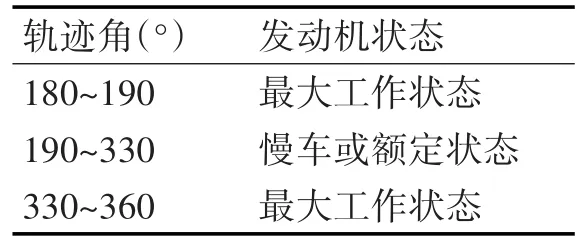
表3 半滾倒轉(zhuǎn)下降段發(fā)動機的工作狀態(tài)
半滾倒轉(zhuǎn)下降段中,飛機沿軌跡加速向下運動,必須保證改出時飛行速度不超過改出高度上的最大速度限制,如表4;同時,飛機在飛行過程中,也有一定的安全高度限制,確保不觸地發(fā)生危險。斤斗下降段運動的邊界性能可以用不同進入高度下的最大速度來表示。
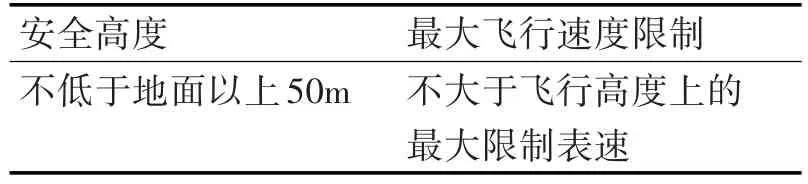
表4 安全高度和速度限制
計算條件:飛機在改出斤斗時,需要滿足兩個條件:一是改出速度小于該高度下的最大飛行速度限制,二是底邊安全高度高于規(guī)定限制值。
參考文獻[2~3],飛機的典型軌跡角與過載的關(guān)系按照表5所示的關(guān)系取值,其余點處過載利用線性插值插值得到。
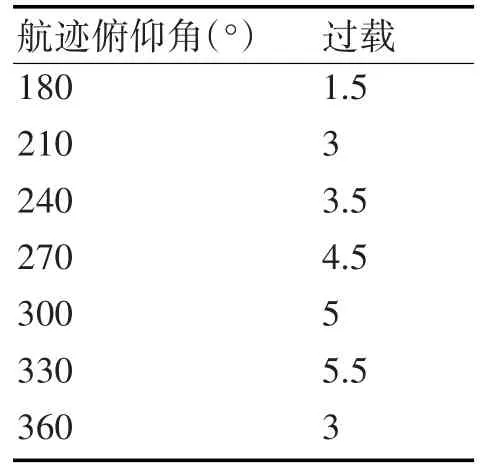
表5 半滾倒轉(zhuǎn)下降段不同俯仰角處的過載值
在Matlab/Simulink仿真平臺中搭建相應(yīng)的計算框圖進行仿真計算,結(jié)果如圖3~圖6所示。圖3所示的是半滾倒轉(zhuǎn)下降段使用慢車狀態(tài),不同高度下的半滾倒轉(zhuǎn)最大進入表速曲線,圖4是對應(yīng)的真速曲線。圖5所示的是半滾倒轉(zhuǎn)下降段使用慢車狀態(tài),不同高度下的斤斗最大進入表速曲線,圖6是對應(yīng)的真速曲線。
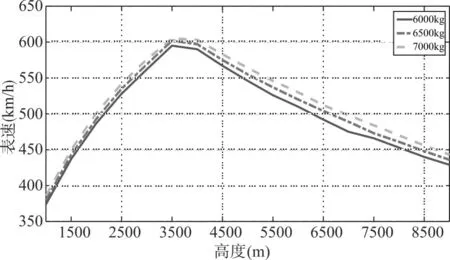
圖3 半滾倒轉(zhuǎn)最大進入表速(慢車)
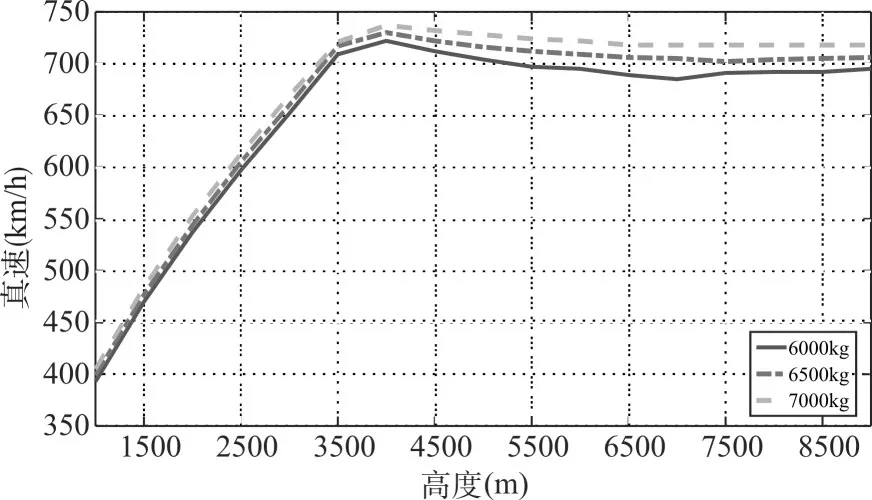
圖4 半滾倒轉(zhuǎn)最大進入真速(慢車)
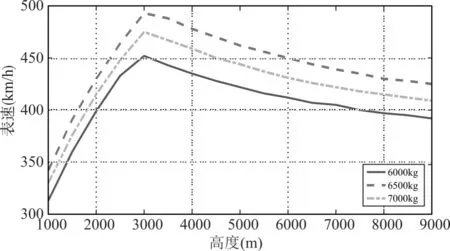
圖5 半滾倒轉(zhuǎn)最大進入表速(額定)
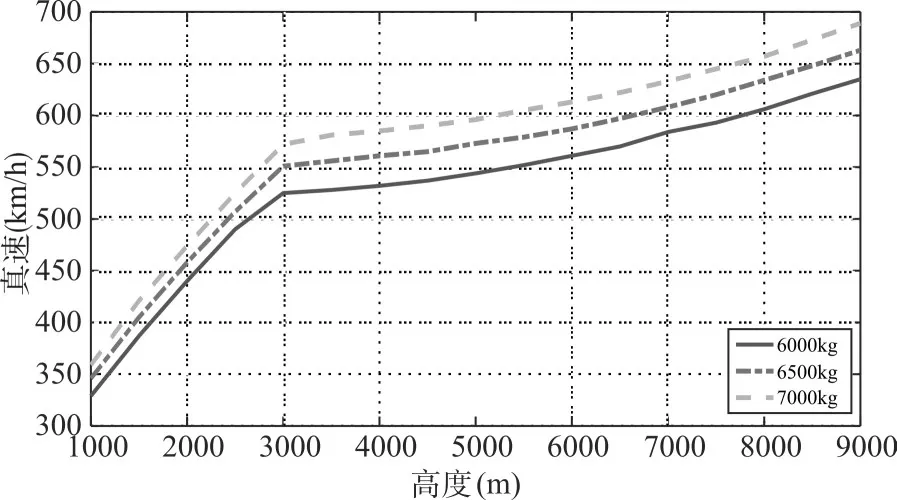
圖6 半滾倒轉(zhuǎn)斤斗最大進入真速(額定)
對于半滾倒轉(zhuǎn)下降段使用慢車狀態(tài)的情況,頂點高度3500m以下時,最大進入速度主要受到安全高度限制,高度每增加1000m,最大進入表速增加約125km/h,真速增加約130km/h,最大進入速度與質(zhì)量關(guān)系不大。頂點高度3500m以上時,最大進入速度主要受到最大飛行馬赫數(shù)限制。頂點高度3500m以上時,高度每增加1000m,最大進入表速減小約32km/h,最大進入真速基本不發(fā)生變化;飛行質(zhì)量每增加100kg,最大進入表速增加約2km/h;最大進入真速增加約3km/h。
對于半滾倒轉(zhuǎn)下降段使用額定狀態(tài)的情況,頂點高度3000m以下時,最大進入速度主要受到安全高度限制,以6500kg為基準(zhǔn),高度每增加1000m,最大進入表速增加約73km/h,真速增加約103km/h;質(zhì)量每增加100kg,最大進入表速增加約4km/h,真速增加約5km/h。頂點高度3000m以上時,最大進入速度要受到最大飛行馬赫數(shù)限值,以6500kg為基準(zhǔn),高度每增加1000m,最大進入表速減小約11km/h,最大進入真速增加約19km/h;飛行質(zhì)量每增加100kg,最大進入表速增加約20km/h;最大進入真速增加約25km/h。
5 地面高度變化的垂直機動邊界性能
地面安全高度指的是為了保證斤斗下降段運動過程中,為了保證飛機在向下運動的過程中不發(fā)生觸地的危險,地面與飛機的高度差始終大于50m的地面最高海拔高度。如果在高原地區(qū)進行垂直機動飛行訓(xùn)練,由于地面高度增加,在半滾倒轉(zhuǎn)下降段中,為避免觸地危險,最大進入速度也會發(fā)生變化。實際飛行中,要根據(jù)不同速度的掉高度情況,分析垂直機動邊界性能,合理選擇進入高度速度,保證飛行安全。
計算條件:標(biāo)準(zhǔn)大氣條件下,飛行質(zhì)量為6500kg,軌跡角190°~330°之間時,發(fā)動機使用慢車工作狀態(tài),其余位置如表3,過載控制規(guī)律如表5。進入速度在最小操縱速度和對應(yīng)頂點高度上的最大進入速度之間變化,分析半滾倒轉(zhuǎn)不同進入速度下的地面安全高度。
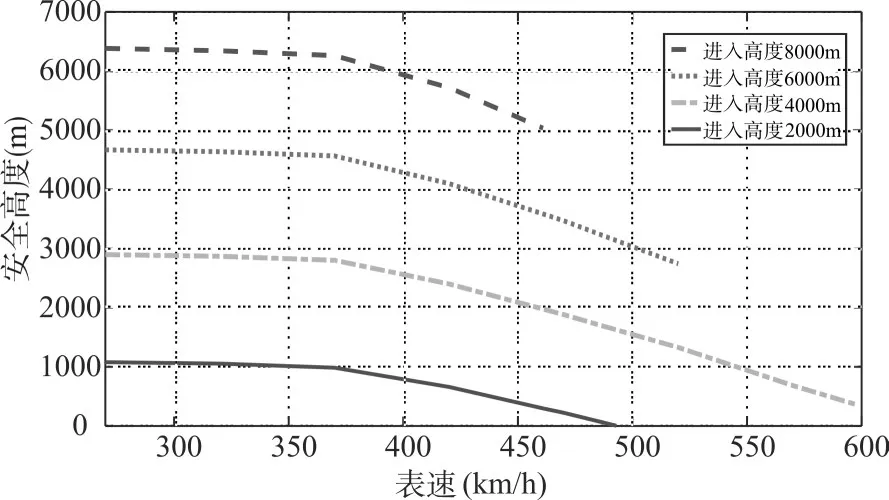
圖7 不同進入表速對應(yīng)的地面安全高度
從計算結(jié)果可以分析得到,地面安全高度受進入高度和進入速度兩個因素共同影響。進入表速小于370km/h時,各進入高度的地面安全高度基本不受速度影響;進入表速大于370km/h時,在小于最大進入表速的情況下,相同高度下,速度每增加50km/h,地面安全高度要降低約450m。
6 結(jié)語
本文通過構(gòu)建飛機的垂直機動的計算模型,給出了垂直機動的數(shù)值計算方法,以某型飛機為例,對垂直機動不同底邊高度的最小進入速度和不同頂邊高度的最大進入速度進行了分析,分析了不同進入表速對應(yīng)的地面安全高度。計算結(jié)果表明,底邊高度增加,半斤斗滾轉(zhuǎn)最小進入速度也要相應(yīng)增加;頂邊高度增加,半滾倒轉(zhuǎn)最大進入速度同樣會增加;隨著地面高度增高,需要減小半滾倒轉(zhuǎn)的進入速度以保證飛行安全。本文所給出的是一種通用計算模型,可以推廣到不同機型的和不同構(gòu)型的垂直機動邊界性能的計算中,實用性較強。在飛行過程中,飛行員需要根據(jù)飛行條件,結(jié)合理論分析結(jié)果進行飛行準(zhǔn)備,力求將飛行訓(xùn)練的效果達到最大化。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機設(shè)計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
