基于STM 32的鋁空氣電池管理系統(tǒng)設(shè)計*
2019-11-28 03:10:08賴忠喜張占軍
艦船電子工程 2019年11期
關(guān)鍵詞:系統(tǒng)
賴忠喜 張占軍 張 三
(臺州職業(yè)技術(shù)學院機電研究所 臺州 318000)
1 引言
鋁空氣電池是鋁電極與空氣電極在溶液中發(fā)生化學反應(yīng),并將化學能轉(zhuǎn)換為電能的一種電化學設(shè)備,它具有體積小、質(zhì)量輕、環(huán)保節(jié)能、比功率和比能量高等特點[1~4],在應(yīng)急電源,后備電源,軍事便攜電源,電動汽車電源和水下電源等各行各業(yè)都有廣泛應(yīng)用[5~7]。但是鋁空氣電池在使用過程中存在持續(xù)大電流放電、電解液溫度過高或者析出的氫氣濃度過高等現(xiàn)象,這都會嚴重影響鋁空氣電池使用效率與使用壽命,甚至發(fā)生危險,因此對鋁空氣電池進行實時監(jiān)控和安全管理就顯得尤為重要,本文設(shè)計了一種以STM32F103VET6微控制器為核心的鋁空氣電池管理系統(tǒng),它能對鋁空氣電池的輸出電壓、電流、電池荷電狀態(tài)SOC(State of Charge)、電解液的溫度和氫氣濃度進行實時監(jiān)控,并且具有過載、過流、欠壓和過溫等各種保護功能,提高了鋁空氣電池的可靠性與使用效率。
2 總體設(shè)計
2.1 鋁空氣電池的總體結(jié)構(gòu)
該鋁空氣電池的額定功率為300W,它由10個鋁空氣電池單體串聯(lián)而成,鋁空氣電池的整體結(jié)構(gòu)如圖1所示,其主要包括電解液回液系統(tǒng)、電解液箱、電池堆、電解液上液系統(tǒng),通風系統(tǒng)、測溫系統(tǒng)、排氫系統(tǒng)、過濾系統(tǒng)和散熱系統(tǒng)等。表1為該鋁空氣電池的基本技術(shù)參數(shù)。
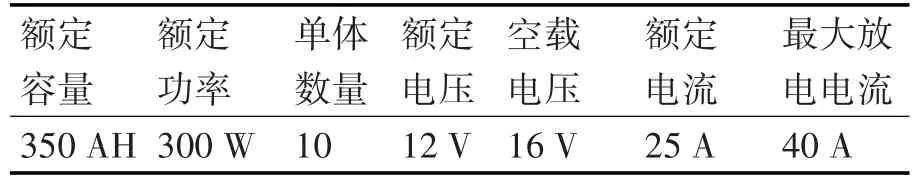
表1 鋁空氣電池的基本技術(shù)參數(shù)
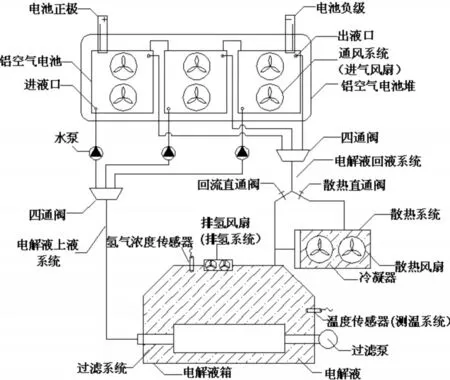
圖1 鋁空氣電池結(jié)構(gòu)原理圖
2.2 鋁空氣電池管理系統(tǒng)的整體設(shè)計
鋁空氣電池管理系統(tǒng)主要包括微控制器模塊、電源模塊、數(shù)據(jù)采集模塊、液晶顯示模塊、鍵盤輸入模塊、執(zhí)行模塊和串口通信模塊等,系統(tǒng)原理框圖如圖2所示。數(shù)據(jù)采集模塊通過傳感器將鋁空氣電池的各種運行參數(shù)轉(zhuǎn)換成相應(yīng)的電信號,然后輸入到微控制器模塊,微控制器對輸入的信號進行A/D轉(zhuǎn)換和數(shù)據(jù)處理后將鋁空氣電池運行參數(shù)實時顯示在液晶顯示器上并把采集的數(shù)據(jù)傳送給上位機,同時微控制器會根據(jù)所采集的鋁空氣電池運行參數(shù)控制相應(yīng)的執(zhí)行模塊,使鋁空氣電池工作在最佳的運行狀態(tài)。鍵盤輸入模塊可以預先設(shè)定各個運行參數(shù)的報警極限值,當參數(shù)超出預先設(shè)定值后,系統(tǒng)立即發(fā)出聲光報警,并切斷負載的供電,提醒相關(guān)操作人員及時采取相應(yīng)的安全措施。此外,微控制器模塊同時也可接收來自上位機的指令對執(zhí)行模塊進行控制。
2.3 啟動電源部分
鋁空氣電池剛開始工作時,鋁空氣電池反應(yīng)存在延遲,鋁電池的輸出不足以驅(qū)動負載,而前期又需要給鋁空氣電池管理系統(tǒng)及其輔助裝置供電,因此需要添加啟動電源,本文啟動電源采用12V的聚合物鋰電池。鋁空氣電池輸出與啟動電源部分如圖3所示,當系統(tǒng)開始工作時,鋁空氣電池不能驅(qū)動負載和電源管理系統(tǒng)正常工作,在這種情況下需要鋰電池給系統(tǒng)獨立供電,此時K1、K2閉合。當鋁空氣電池的性能上升,檢測到電池輸出電壓能驅(qū)動整個系統(tǒng)時,則K2閉合,K1斷開,由鋁空氣電池給負載和電源管理系統(tǒng)供電。當系統(tǒng)出現(xiàn)過載、過流、欠壓和過溫等情況時,則將K2斷開,使負載脫離鋁電池供電,對鋁電池起到保護作用。
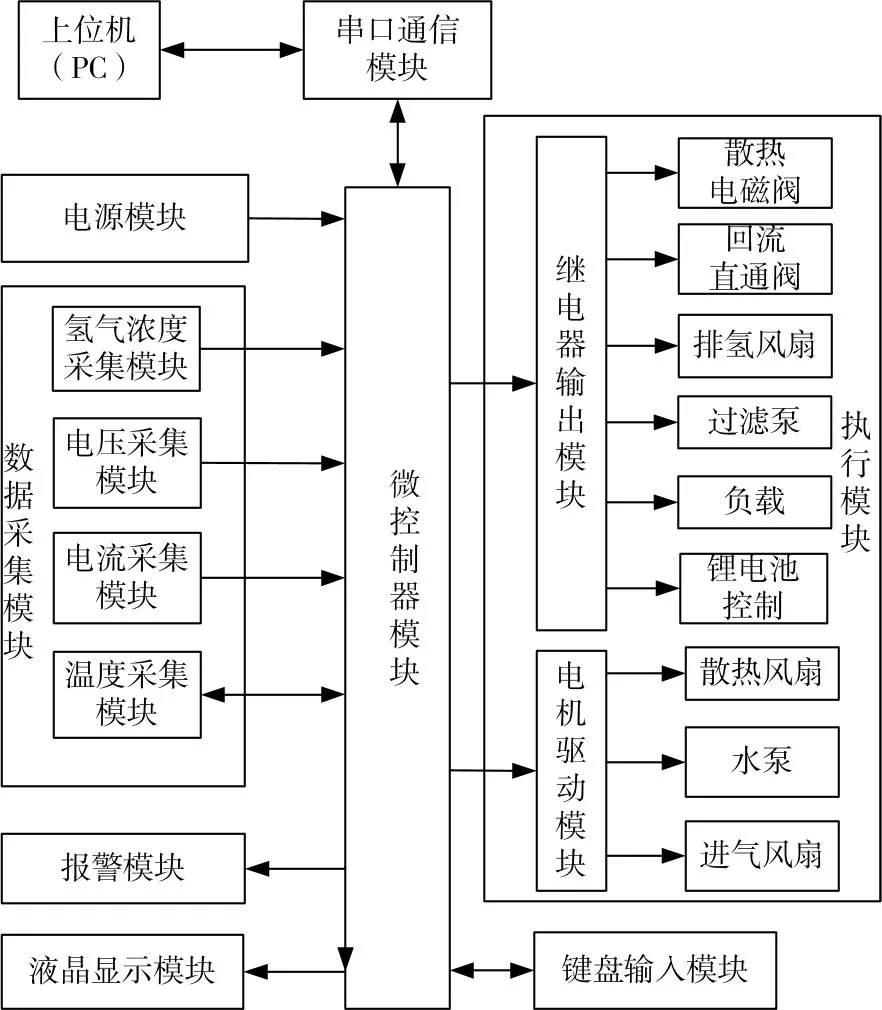
圖2 鋁空氣電池管理系統(tǒng)框圖

圖3 鋁空氣電池輸出與啟動電源部分
3 系統(tǒng)硬件設(shè)計
3.1 微控制器模塊
微控制器模塊選用STM32F103VET6單片機[8]作為主控芯片。主要原因如下:1)該微控制器是一款基于Cortex-M3的32位處理器,具有低功耗,抗干擾能力強,低成本和可靠性高等特點。2)根據(jù)控制系統(tǒng)的要求,選用的單片機必須具有多I/O口、高速異步通信串口,PWM,SPI和存儲數(shù)據(jù)等功能,STM32F103VET6單片機內(nèi)置64KB容量的SRAM和512KB容量的閃存,80個I/O口,3個12位ADC,4個通用16位定時器和1個PWM定時器,含有USART,SPI,I2C,CAN等通信接口,非常適合本設(shè)計的需要。
3.2 數(shù)據(jù)采集模塊
數(shù)據(jù)采集模塊的主要功能是對鋁空氣電池工作時輸出的電壓、電流、電解液溫度和電解液箱的氫氣濃度進行采集。為防止鋁空氣電池的輸出電壓對控制系統(tǒng)造成干擾,本系統(tǒng)采用線性模擬光耦HCNR201[9]對鋁電池的輸出電壓進行采集,電壓采集模塊電路如圖4所示,該電路分為四個部分,第一部分是由電阻分壓網(wǎng)絡(luò)和一級運放構(gòu)成,一級運放起到電壓跟隨器的作用。第二部分是由二級運放通過HCNR201組成的負反饋網(wǎng)絡(luò)構(gòu)成,主要起到將電壓信號轉(zhuǎn)變成電流信號的作用。第三部分是由三級運放電路構(gòu)成,主要是將光耦輸出的電流信號轉(zhuǎn)變?yōu)殡妷盒盘枺⒃鰪娯撦d驅(qū)動能力。第四部分由四級運放,RC濾波電路和二極管鉗位電路所構(gòu)成。圖中電阻 R16、R17、R18、R19、R20選用千分之一的精密電阻來提高電壓采集精度,電容C30、C31為反饋電容,用于提高電路穩(wěn)定性,消除自激振蕩。
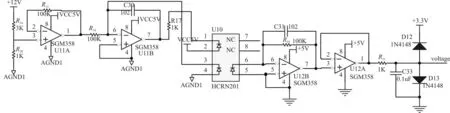
圖4 電壓采集模塊電路圖
電流采集模塊電路如圖5所示,霍爾電流傳感器選用Allegro公司生產(chǎn)的線性電流傳感器ACS758-050B。該器件具有精度高,響應(yīng)時間快,超低功率損耗等特點[10],其輸出電壓Vout的表達式為

式中2.5V是基準電壓,a為傳感器靈敏度系數(shù),其值為40mV/A,I為放電電流。由于鋁空氣電池工作時,其輸出電流會在0~40A變化,因此ACS758的輸出電壓會在2.5V~4.1V變化,為提高電流采樣的精度和分辨度,通過減法比例運算電路對霍爾傳感器的輸出信號進行處理,在減法比例運算電路中采用高精度穩(wěn)壓芯片TL431作為2.5V基準參考電壓,運算放大器選擇軌對軌放大、開環(huán)增益較為穩(wěn)定的集成芯片SGM321。電阻R29、R30、R33、R36選用千分之一的精密電阻,取R30=R33=2K,R29=R36=3.3K,則根據(jù)減法比例運算電路特性有:

式中,V0為經(jīng)過減法比例運算電路后的輸出電壓。
由于控制系統(tǒng)對電解液的溫度和析出的氫氣濃度的采集精度要求不高,因此溫度采集模塊采用精度為1%的負溫度系數(shù)熱敏電阻。該熱敏電阻具有體積小、響應(yīng)時間短和成本低等優(yōu)點。氫氣濃度采集模塊選用MQ-8半導體型氫氣傳感器。MQ-8氫氣傳感器以SnO2為氣敏材料,可探測100ppm~10000ppm濃度的氫氣,具有成本低,壽命長,靈敏性好和驅(qū)動電路簡單等特點[11]。
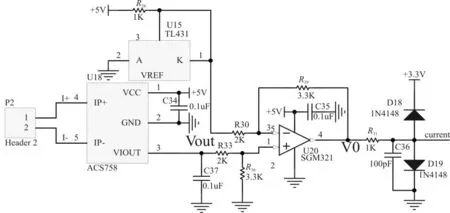
圖5 電流采集模塊電路圖
3.3 電源管理模塊
電源電路是鋁空氣電池管理系統(tǒng)正常工作的基礎(chǔ),其穩(wěn)定性決定了系統(tǒng)是否能夠安全、穩(wěn)定的運行。本系統(tǒng)需要12V、兩個隔離5V和3.3V電源。其中12V主要為執(zhí)行模塊中的執(zhí)行元件提供電源,為降低成本該電壓直接由鋁空氣電池輸出提供,一路5V為隔離光耦輸入之前的電路提供電源,另外一路隔離的5V為系統(tǒng)其它元器件提供電源,3.3V為微控制器提供電源,本系統(tǒng)采用LM2596S將鋁空氣電池輸出的12V轉(zhuǎn)換為5V,采用隔離電源器件B0505S實現(xiàn)兩個5V電源的隔離,采用TPS7333將5V轉(zhuǎn)換為3.3V電源。圖6為電源模塊電路原理圖。

圖6 電源模塊電路圖
3.4 執(zhí)行模塊
執(zhí)行模塊包括繼電器輸出模塊、電機驅(qū)動調(diào)速模塊和相關(guān)的執(zhí)行設(shè)備,微控制器將要輸出的開關(guān)量通過光耦與輸出通道進行隔離,避免微控制系統(tǒng)與執(zhí)行機構(gòu)之間的相互干擾,光耦輸出的信號經(jīng)過三級管放大后驅(qū)動12V小型繼電器,從而控制執(zhí)行設(shè)備動作,電池堆中電解液的溫度和流速以及進氣風扇對鋁空氣電池的性能有重要的影響,根據(jù)采集的鋁空氣電池工作參數(shù),采用LGS公司的L298N為核心的驅(qū)動調(diào)速電路來對水泵、散熱風扇和進氣風扇進行控制,L298N輸出電流2A,驅(qū)動電壓范圍+2.5V~46V,能很方便地通過單片機進行PWM調(diào)速[12]。
4 系統(tǒng)軟件設(shè)計
4.1 下位機軟件設(shè)計
系統(tǒng)軟件的主程序流程如圖7所示,鋁空氣電池開始工作時,整個系統(tǒng)由鋰電池進行供電,鋁空氣電池管理系統(tǒng)首先會進行相關(guān)初始化的工作,隨著鋁空氣電池兩端電壓緩慢升高,當它的輸出電壓達到可以正常驅(qū)動負載的時候,整個系統(tǒng)的電能都是由鋁空氣電池提供,接著電池管理系統(tǒng)從單片機的FALASH讀取上次鋁空氣電池關(guān)閉時的SOC值和所設(shè)置的工作參數(shù)閾值,并對定時器和中斷進行初始化工作,接著系統(tǒng)對鋁空氣電池工作時的各種參數(shù)進行采集并與上位機進行串口通信處理。然后單片機根據(jù)采集的參數(shù)對執(zhí)行機構(gòu)進行相應(yīng)的控制,使鋁空氣電池工作在最佳的工作狀態(tài)。各種工作參數(shù)的閾值可以通過鍵盤輸入模塊來進行設(shè)置,設(shè)定后的數(shù)值會自動保存至單片機內(nèi)部的FALASH中。當所采集的各個工作參數(shù)超過所設(shè)置的閾值時,管理系統(tǒng)會發(fā)出報警,并切斷對負載的供電,起到對鋁空氣電池進行智能保護的作用,系統(tǒng)每隔200ms采樣一次鋁空氣電池的輸出電流并采用安時積分法對SOC值進行估算,最后將鋁空氣電池的各種工作參數(shù)和SOC值在液晶顯示模塊上直觀地顯示出來,方便用戶了解系統(tǒng)的工作狀況,當鋁空氣電池遇到兩種情況下會停止工作:1)如果用戶按下管理系統(tǒng)的停止按鈕,控制系統(tǒng)則會將當前的SOC值存入FALASH,同時控制電解液泵使鋁空氣電池停止工作;2)如果當系統(tǒng)檢測到SOC值 ≤5%時,系統(tǒng)會報警提示更換電解液或者鋁片,并停止鋁空氣電池工作。其它正常情況下,控制系統(tǒng)則會對鋁空氣電池的參數(shù)進行循環(huán)的監(jiān)測和控制。
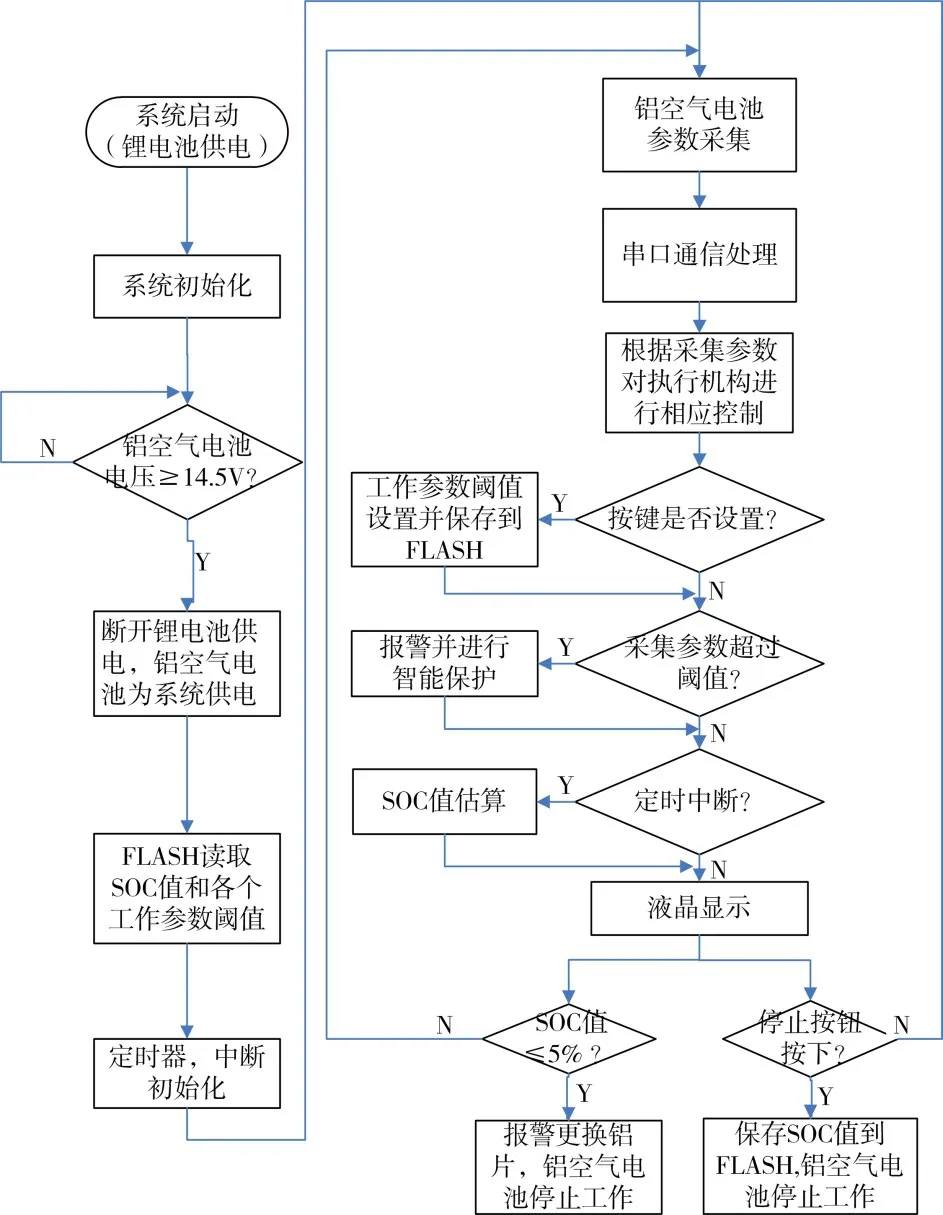
圖7 系統(tǒng)主程序流程圖
4.2 上位機軟件設(shè)計
上位機軟件采用Microsoft Visual C++6.0進行編程,其主要實現(xiàn)對鋁空氣電池參數(shù)的實時監(jiān)控和數(shù)據(jù)存儲等功能,主要包括數(shù)據(jù)實時采集監(jiān)控模塊,控制參數(shù)設(shè)置模塊,通信模塊,數(shù)據(jù)處理模塊和歷史查詢模塊等,上位機軟件的監(jiān)控界面如圖8所示。
5 測試結(jié)果
將上述鋁電池管理系統(tǒng)、上位機軟件與鋁空氣電池進行聯(lián)合測試,負載采用3個額定功率為100瓦的燈泡,實驗中用泰克TBS1104示波器測量值作為參考值,每10Min記錄一次數(shù)據(jù)。表2記錄了鋁空氣電池輸出電壓和電流的測試結(jié)果。其中V1,I1為上位機采集到的鋁空氣電池輸出電壓和電流測量值,V2,I2為示波器的測量值。從表中可以看出該電池管理系統(tǒng)的電壓測量精度小于0.8%,電流測量精度小于1.5%,基本能滿足控制要求。
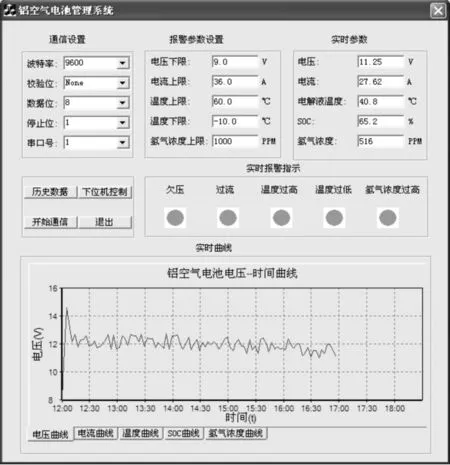
圖8 上位機監(jiān)控界面
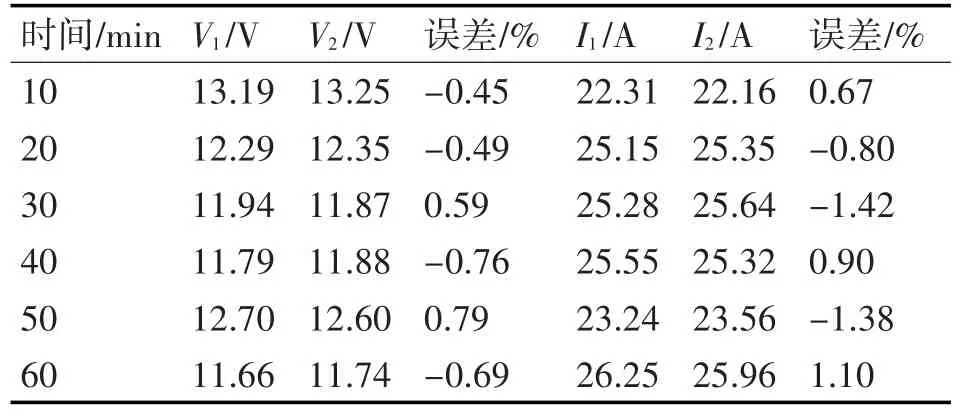
表2 鋁空氣電池電壓電流采集測試結(jié)果
6 結(jié)語
針對鋁空氣電池運行狀態(tài)參數(shù)實時監(jiān)控和安全管理的需求,提出一種基于STM32F103VET6微控制器為核心的鋁空氣電池管理系統(tǒng)設(shè)計方案,并進行了軟硬件的設(shè)計,該系統(tǒng)工作穩(wěn)定,控制效果良好,不僅提高了鋁空氣電池的使用效率和安全性,而且還延長了鋁空氣電池的使用壽命,具有一定的實用價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
