無刷直流電機自適應(yīng)調(diào)速控制系統(tǒng)的設(shè)計
2019-12-02 07:13:58軍1程詩卿1黃海波1陳宇峰1王志虎
計算機測量與控制 2019年11期
盧 軍1,程詩卿1,黃海波1,陳宇峰1,高 云,王志虎
(1.湖北汽車工業(yè)學(xué)院 電氣與信息工程學(xué)院,湖北 十堰 442002;2.東風(fēng)汽車動力零部件有限公司,湖北 十堰 442000)
0 引言
直流電動機具有運行效率高、調(diào)速性能好等諸多優(yōu)點而得以廣泛的運用。但傳統(tǒng)的直流電動機大都采用電刷,以機械換相方式進行換相即有刷電機,由于摩擦等物理因素進而存在噪聲、火花、無線電干擾以及壽命短等弱點[1]。隨著半導(dǎo)體行業(yè)的飛躍發(fā)展發(fā)展,借助位置傳感器和電子換相線路來替代機械換相的直流無刷電機應(yīng)運而生[2-3]。
為了使得三相直流無刷電機在各控制系統(tǒng)中得到更好的運用,設(shè)計生產(chǎn)一款穩(wěn)定的、控制性能優(yōu)越、成本低廉的驅(qū)動控制器將成為直流無刷電機發(fā)展的重要需求[4-6]。本系統(tǒng)設(shè)計的是基于SPANSION MB9BF121K單片機的三相直流無刷電機控制系統(tǒng),系統(tǒng)采用上位機實現(xiàn)電機轉(zhuǎn)速設(shè)定及曲線繪制以及人機交互,驅(qū)動部分主要采用IR2101S雙通道高速功率驅(qū)動器,控制部分實現(xiàn)電機正反轉(zhuǎn)運行控制、電機測速、PID算法調(diào)節(jié)及防過流、防堵轉(zhuǎn)等電機保護功能。
1 系統(tǒng)總體方案設(shè)計
如圖1所示,本系統(tǒng)是基于SPANSION MB9BF121K單片機的三相無刷直流電機驅(qū)動器的設(shè)計。系統(tǒng)采用有感驅(qū)動方式的PID閉環(huán)調(diào)速控制,利用霍爾位置傳感器來反饋位置,根據(jù)位置信息對電機進行換相,使電機連續(xù)平穩(wěn)運行,并同時利用位置信息計算電機的當(dāng)前轉(zhuǎn)速,反饋到單片機上,進行速度PID閉環(huán)調(diào)節(jié),使電機轉(zhuǎn)速穩(wěn)定。能夠?qū)崿F(xiàn)無刷直流電機的正反轉(zhuǎn)和啟停控制,整個過程通過串口與上位機通信,實時顯示當(dāng)前的轉(zhuǎn)速曲線,并可以通過上位機進行轉(zhuǎn)速的設(shè)定以及啟停,同時具備PID參數(shù)的設(shè)定等人機交互功能。
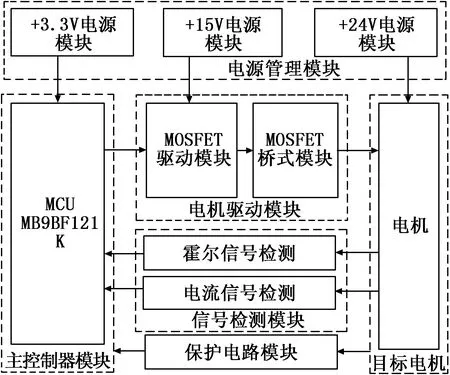
圖1 系統(tǒng)總體結(jié)構(gòu)框圖
2 系統(tǒng)硬件設(shè)計
從圖1可知,本系統(tǒng)硬件部分主要由六大部分組成,分別是:電源管理模塊、主控制器模塊、電機驅(qū)動模塊、信號檢測模塊、電機保護電路模塊以及目標(biāo)電機組成。電源管理模塊為系統(tǒng)提供所需的各類電源,電機驅(qū)動模塊實現(xiàn)MCU信號對目標(biāo)電機控制,信號檢測模塊檢測電機運行狀態(tài),為電機換相及電機保護提供參數(shù)支持,保護電路模塊檢測電機運行的狀況,防止過流和堵轉(zhuǎn)。限于篇幅,下面主要介紹電機驅(qū)動模塊、信號檢測模塊以及保護電路模塊。在電機驅(qū)動模塊中重點要做好高壓浮柵型驅(qū)動電路的設(shè)計,在MOSFET導(dǎo)通時要保證15V的導(dǎo)通壓差,在MOSFET管關(guān)斷情況下加快柵極-源極電容放電;在信號檢測模塊中重點要做好霍爾信號檢測及處理電路,保證獲取純凈和穩(wěn)定的霍爾信號以利于提取轉(zhuǎn)子位置和速度信息;保護電路模塊除了完成電流的實時采集,還要做好過流保護,一旦電流過大就要觸發(fā)單片機的過流中斷。
2.1 MOSFET驅(qū)動模塊
MOSFET驅(qū)動部分電源是+24 V,當(dāng)MOSFET管導(dǎo)通時,源極電壓近似為電源電壓+24 V,為保證MOSFET管維持導(dǎo)通,柵極電壓必須大于+24 V,為實現(xiàn)比電源電壓還高的驅(qū)動電壓,采用了高壓浮柵型驅(qū)動電路。
基于IR2101S的驅(qū)動電路如圖2所示,HIN為上橋臂控制輸入,LIN為下橋臂控制輸入,HO為上橋臂驅(qū)動輸出,LO為下橋臂驅(qū)動輸出。電容C29為自舉電容,其在MOSFET管斷態(tài)時通過二極管D5被15 V充電。該電容在器件導(dǎo)通時可將柵極電壓抬升至39 V,使柵極-源極得到15 V的導(dǎo)通壓差,以避免MOSFET管關(guān)斷,防止欠壓自鎖。R9、R10為33 Ω電阻,其主要作用是防止震蕩、減小柵極充電峰值電流、保護場效應(yīng)管漏極-源極不被擊穿。D11、D15為1N4148二極管,主要是在MOSFET管關(guān)斷情況下加快柵極-源極電容放電。
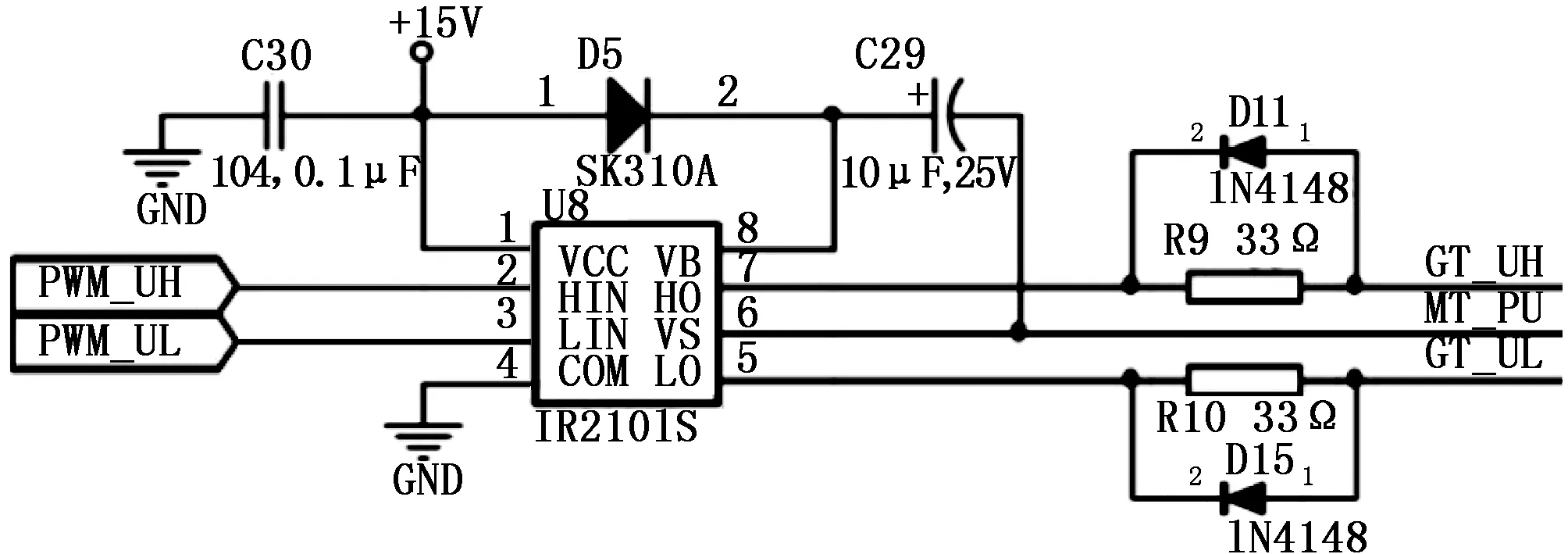
圖2 MOSFET驅(qū)動模塊
2.2 信號檢測模塊
信號檢測電路主要實現(xiàn)霍爾信號檢測及處理,如圖3所示,在霍爾信號輸入端加入了施密特反相器,以獲得一個干凈穩(wěn)定的霍爾信號。EDS1為防靜電保護,R18、R19為分壓電阻,使得輸出霍爾信號為3.3 V,C37為濾波電容,濾除霍爾信號中高頻噪聲信號,以保證霍爾信號的穩(wěn)定。
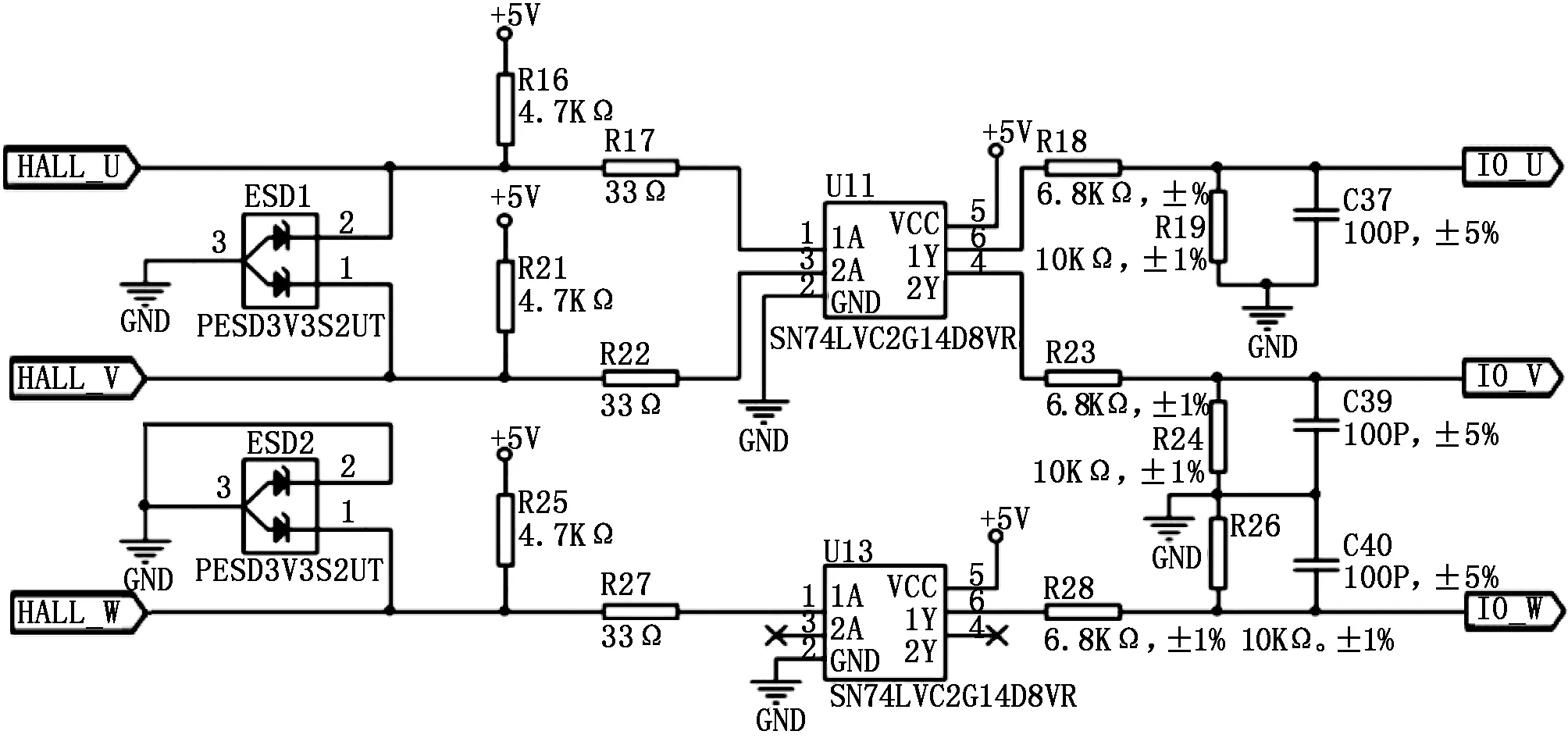
圖3 霍爾信號檢測模塊
2.3 電流采集與保護電路
電機保護電路設(shè)計如圖4所示,采用比較器電路,輸入信號為采樣電阻端電壓,當(dāng)電機過流或堵轉(zhuǎn)時,采樣電阻端電壓增大,超過門限電壓后,比較電路輸出一個下降沿信號,觸發(fā)DTIF電機急停保護中斷,防止電機過流損毀,相比軟件保護而言,具有響應(yīng)速度快的優(yōu)勢。
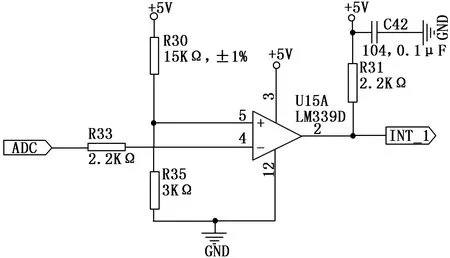
圖4 電機保護模塊
3 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件由上位機與下位機兩部分構(gòu)成,上位機軟件實現(xiàn)系統(tǒng)的控制與顯示功能,下位機軟件控制電機的運行以及故障處理等功能,軟件架構(gòu)如圖5所示。
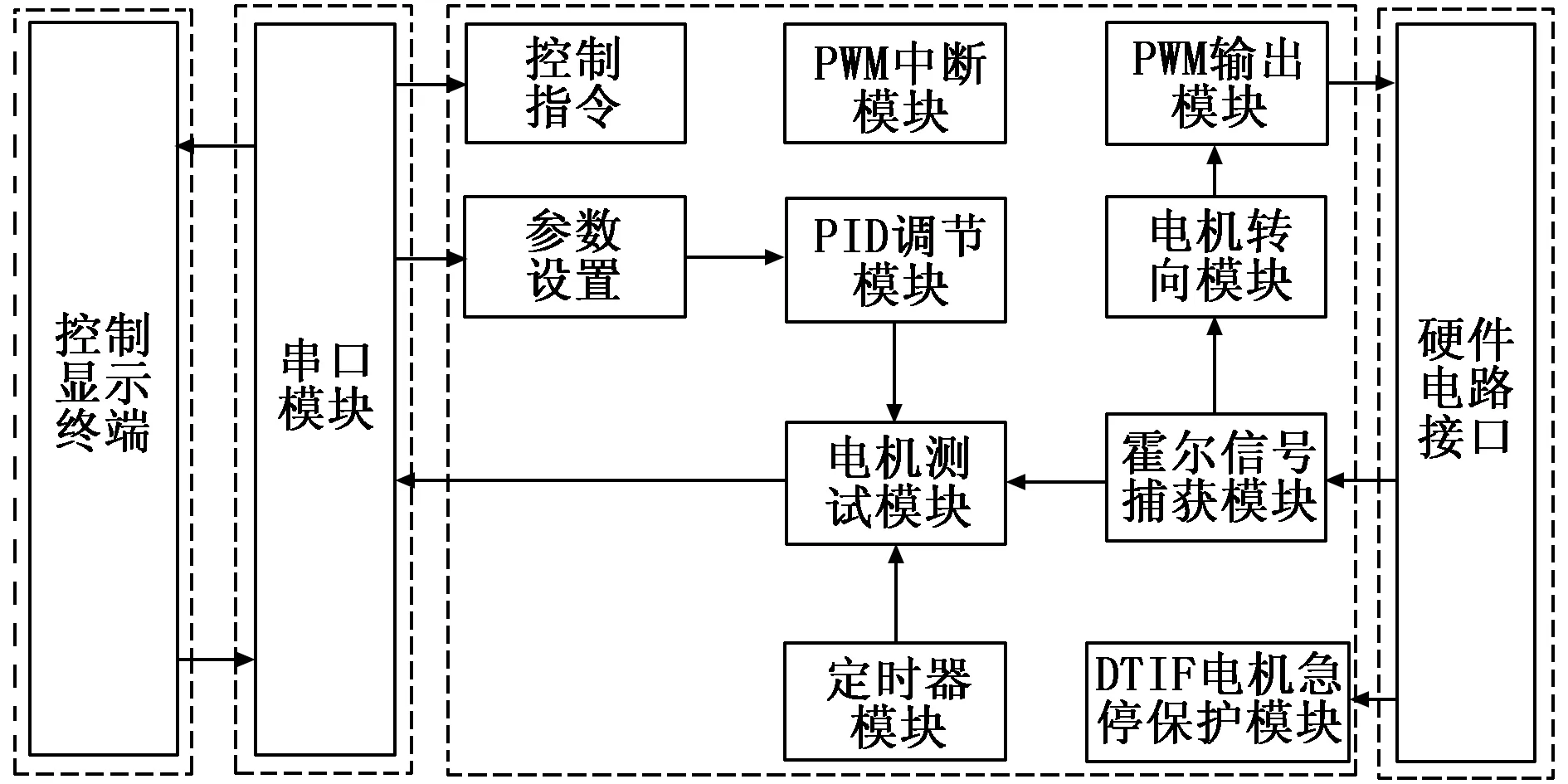
圖5 軟件架構(gòu)框圖
系統(tǒng)運行時,上位機向主控制器模塊發(fā)送開始工作指令;主控制器模塊接收到指令后,通過信號檢測模塊獲得電機霍爾信號,測得信號經(jīng)電機換相函數(shù)控制PWM模塊輸出相應(yīng)狀態(tài)的PWM波;輸出的PWM經(jīng)電機驅(qū)動模塊后驅(qū)動電機轉(zhuǎn)動;霍爾信號被電機換相函數(shù)處理的同時經(jīng)電機測速函數(shù)測得電機當(dāng)前轉(zhuǎn)速,通過串口發(fā)送至上位機實時顯示;若進行閉環(huán)控制,由上位機設(shè)置后,PID模塊得到PID參數(shù),根據(jù)測得的電機轉(zhuǎn)速進行PID調(diào)節(jié)。本系統(tǒng)設(shè)計有硬件過流保護裝置,信號檢測模塊測得電機過流時觸發(fā)DTIF電機急停中斷,關(guān)閉PWM輸出對系統(tǒng)進行保護。軟件流程如圖6所示,下面重點介紹電機換相處理、測速以及PID速度調(diào)節(jié)。為了精確地對速度進行測量,采用T法和M法相結(jié)合的方法,在轉(zhuǎn)速小于500 r/min以下時采用T法測速,在轉(zhuǎn)速大于500 r/min以上時采用M法測速[7-8]。同時采用遞推均值法和一階RC濾波法相結(jié)合的數(shù)據(jù)濾波處理方法[9-10]。在速度控制時,采用自適應(yīng)分段PID速度控制策略,根據(jù)絕對速度誤差的大小來施加不同權(quán)重的積分和微分作用。
3.1 電機換相處理
電機轉(zhuǎn)動過程中測得霍爾信號時序如圖7所示,當(dāng)電機轉(zhuǎn)子轉(zhuǎn)動60°電氣角度后,霍爾傳感器檢測到另一種信號狀態(tài)后控制器部分將改變功率MOSFET的導(dǎo)通順序。
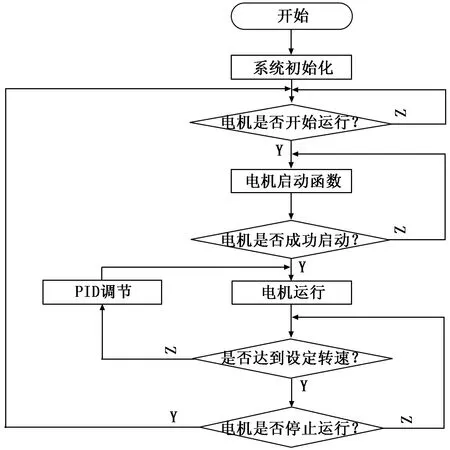
圖6 軟件設(shè)計流程圖
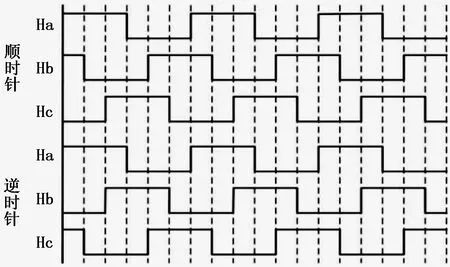
圖7 霍爾信號時序圖
經(jīng)測量,直流無刷電機轉(zhuǎn)動時各功率MOSFET導(dǎo)通順序如表1所示。其中,AH、AL、BH、BL、CH、CL分別對應(yīng)三相橋臂的上下半橋。在保證功率MOSFET導(dǎo)通順序正確的情況下要防止驅(qū)動橋上下橋臂同時導(dǎo)通,需要加入一定的死區(qū)時間,避免一個橋臂尚未完全關(guān)閉就將另一個橋臂開啟,導(dǎo)致上下橋臂短路而使功率MOSFET燒毀。
3.2 電機測速
MB9BF121K單片機的外部輸入捕獲單元ICU用于檢測霍爾信號從而得到電機轉(zhuǎn)速。ICU由FRTS、沿檢測電路、16 位捕捉寄存器和控制寄存器構(gòu)成。基本單位為2路通道構(gòu)成,各個通道帶有2組各種電路。ICU捕獲管腳信號檢測到有效沿時,就捕捉FRT計數(shù)值并對CPU發(fā)生中斷如圖8所示。邊沿檢測電路是檢測輸入信號的有效沿的電路,ICCP寄存器將輸入信號的變化時機作為FRT計數(shù)值捕捉,輸入信號的有效沿可從上升沿、下降沿和雙沿中選擇。在檢測到預(yù)先設(shè)定的有效沿且進行捕捉的時刻,可對CPU觸發(fā)中斷進行電機換相和測速。
本系統(tǒng)使用的三相直流無刷電機最高轉(zhuǎn)速在4 200 r/min,為了精確地對速度進行測量,采用T法和M法相結(jié)合的方法。在轉(zhuǎn)速小于500 r/min以下時采用T法測速,測量單個脈沖信號周期,換算成脈沖信號頻率得到電機轉(zhuǎn)速。在轉(zhuǎn)速大于500 r/min以上時采用M法測速,通過單位時間內(nèi)測量待測脈沖信號的個數(shù),換算得到電機轉(zhuǎn)速。
系統(tǒng)運行過程中存在一定的機械振動,同時霍爾信號也存在一定的誤差干擾,所以必須對測得轉(zhuǎn)速數(shù)據(jù)進行濾波,以保證數(shù)據(jù)的穩(wěn)定性及可靠性,這里采用遞推均值法和一階RC濾波法相結(jié)合的方法。即首先采用遞推均值法:設(shè)定一個N長采樣值的序列,根據(jù)序列先進先出原則,將每次采樣得到的數(shù)據(jù)放入序尾,同時將原來序首的數(shù)據(jù)丟棄,然后將序列中的數(shù)據(jù)進行算術(shù)平均得到濾波后的數(shù)據(jù)。然后采用一階RC濾波法:設(shè)加權(quán)因子為a∈0~1,將前面濾波后的數(shù)據(jù)和本次采樣值再進行如下的一階RC數(shù)字濾波:本次采樣值*(1-a)+a*上次濾波結(jié)果值。為保證濾波效果和數(shù)據(jù)輸出的實時性,經(jīng)過測算N=30,a=0.7。圖9是濾波后的轉(zhuǎn)速曲線對比,可見一階RC濾波與遞推均值濾波后得到的轉(zhuǎn)速曲線效果明顯好轉(zhuǎn),保證了系統(tǒng)的穩(wěn)定性。
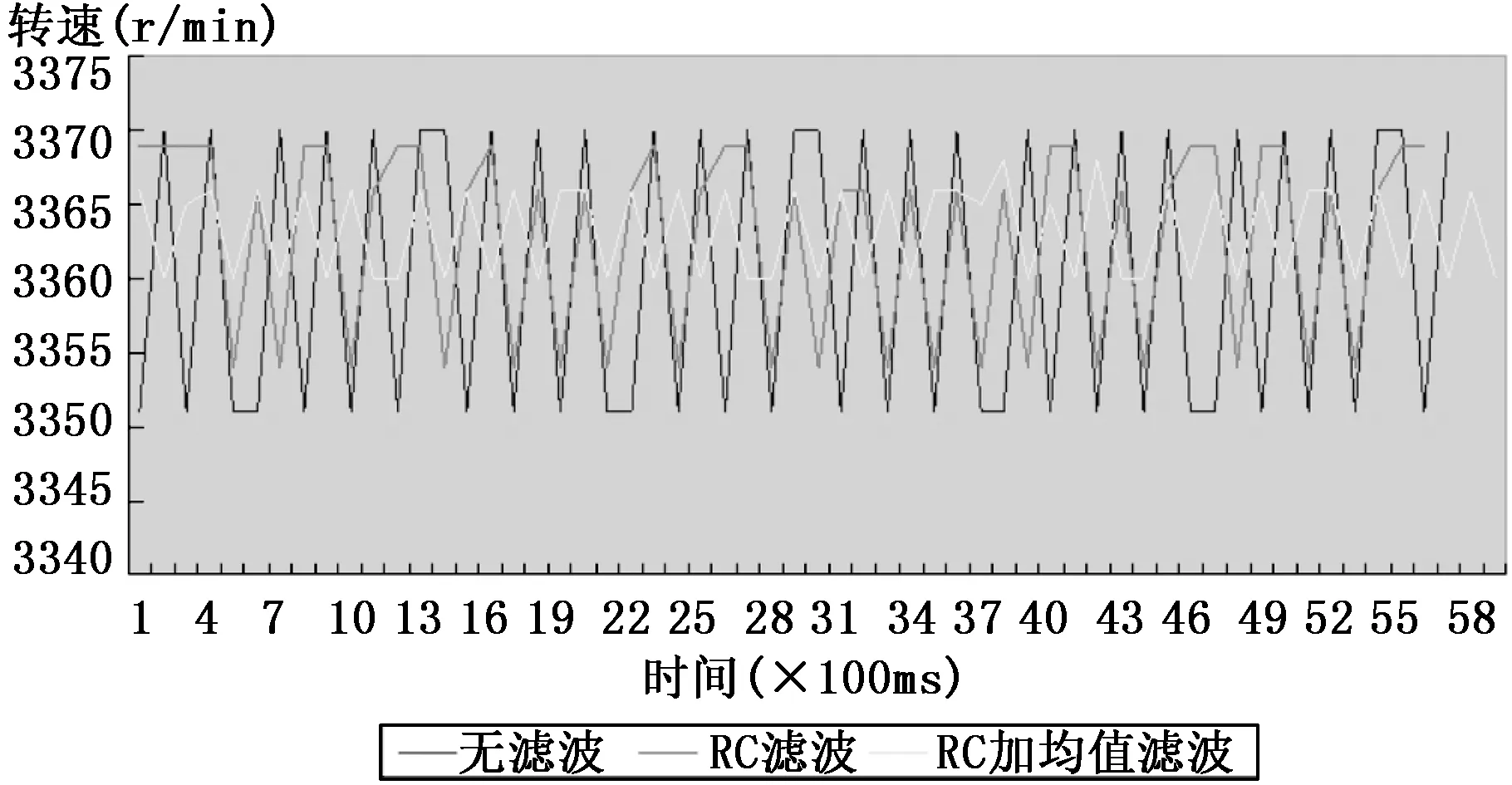
圖9 濾波轉(zhuǎn)速曲線對比
3.3 速度控制
電機在帶負載運行時,尤其當(dāng)電機在啟動、停止,或者大幅度加減速和負載突變時,速度的設(shè)定值與反饋值之間都會出現(xiàn)較大的偏差。為避免積分作用降低系統(tǒng)響應(yīng)的實時性以及微分作用給系統(tǒng)帶來較大的擾動,根據(jù)絕對速度誤差ξ大小施加權(quán)重β的積分和微分作用,以達到逐步消除靜差提高控制精度和加快系統(tǒng)響應(yīng)速度的目的。設(shè)速度誤差為err(k),且絕對誤差ξ=|err(k)|。根據(jù)本系統(tǒng)電機參數(shù),經(jīng)過多次調(diào)試確定了如圖10所示的β/ξ關(guān)系。當(dāng)ξ小于400 r/min時,PID運算中比例積分微分各部分全部作用;當(dāng)ξ大于2 000 r/min時,PID運算中只有比例部分起作用;當(dāng)ξ在其他范圍取值時,PID運算中積分和微分作用的權(quán)重分別在0~1之間取值。最后由公式(1)計算PID調(diào)節(jié)結(jié)果。
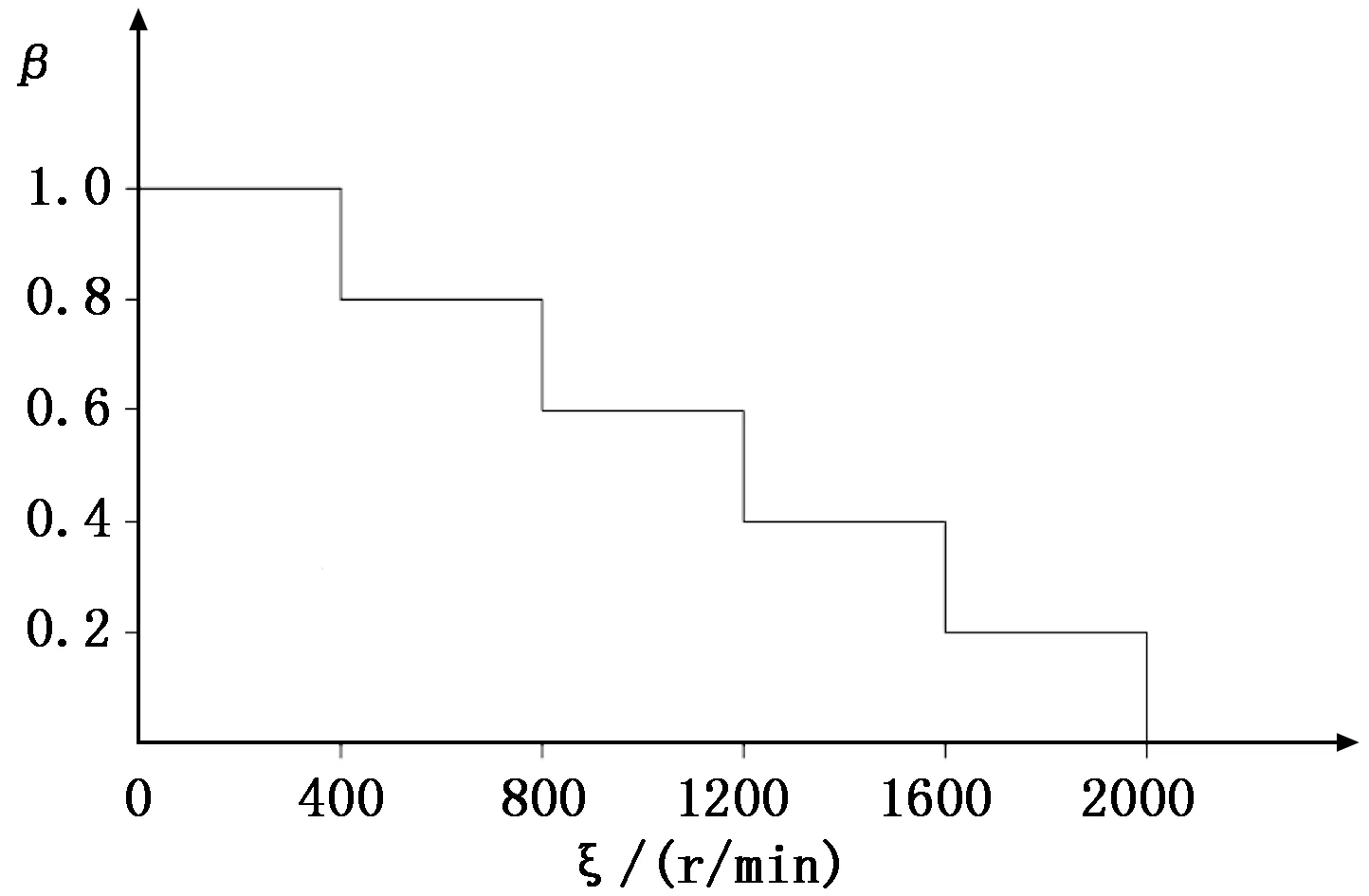
圖10 β/ξ關(guān)系圖
u(k)=kperr(k)+
(1)
這里,T為采樣時間,在系統(tǒng)里是速度調(diào)節(jié)的計算周期。
4 系統(tǒng)測試
利用LABVIEW開發(fā)上位機監(jiān)控軟件,主要功能包括兩部分,分別為接收數(shù)據(jù)編解碼部分以及發(fā)送數(shù)據(jù)編解碼部分。主要包括開環(huán)閉環(huán)控制選擇、電機正反轉(zhuǎn)選擇、系統(tǒng)運行控制按鈕、電機轉(zhuǎn)速電流擬合曲線圖、PID參數(shù)設(shè)置等。電機額定參數(shù)為:電壓24 V,功率50 W,轉(zhuǎn)速4 000 r/min。為驗證系統(tǒng)性能,分別進行了空載實驗和負載試驗,設(shè)采樣周期T=0.2 s。
在圖11空載測試中,電機從起始運行速度250 r/min經(jīng)過0.8s達到設(shè)定額定速度4 000 r/min,穩(wěn)定運行至6.5 s時,又從額定轉(zhuǎn)速4 000 r/min經(jīng)過0.8 s達到設(shè)定轉(zhuǎn)速250 r/min。可見系統(tǒng)無超調(diào),響應(yīng)速度快,響應(yīng)后的速度也很平穩(wěn)。對應(yīng)的電流從起始的0.5 A快速上升到約1.3 A,約0.5 s后穩(wěn)定到額定轉(zhuǎn)速下的0.75 A。同樣在轉(zhuǎn)速下降至起始速度250 r/min時,電流也非常平滑的降落并穩(wěn)定至起始值0.5 A。
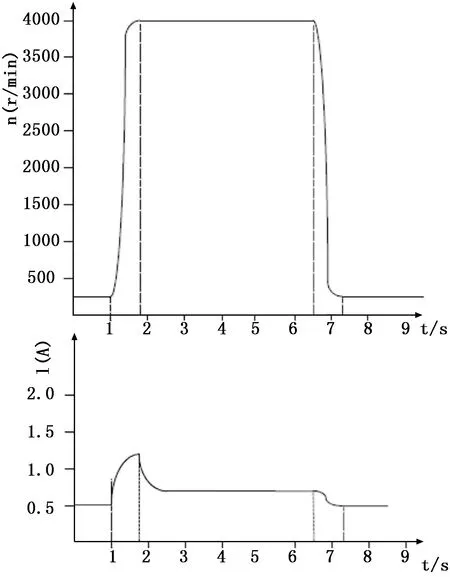
圖11 空載測試速度電流曲線圖
在圖12負載測試中,電機的設(shè)定目標(biāo)速度是2 000 r/min,在4 s時減輕負載,速度上升到2 800 r/min后又回到2 000 r/min,過渡時間約1.5 s。在8 s時施加上撤銷的負載,速度降落到1 200 r/min后又回到目標(biāo)速度2 000 r/min,過渡時間約1.5 s。在減輕時,電流從起始1.5 A快速降落至0.5 A以下,并和速度同步穩(wěn)定至1.0 A。在重新施加負載時,電流從1.0 A快速上升至2 A以上,并和速度同步穩(wěn)定至起始1.5 A。
5 結(jié)論
本系統(tǒng)基于SPANSIONMB9BF121K無刷電機專用控制芯片設(shè)計了三相直流無刷電機驅(qū)動器,利用霍爾位置傳感器實現(xiàn)無刷電機的有感驅(qū)動。系統(tǒng)主要分下位機驅(qū)動控制部分以及上位機控制軟件。主要實現(xiàn)了以下功能:1)驅(qū)動器設(shè)計有過流、防堵轉(zhuǎn)等電機保護,當(dāng)電機運行故障時,故障指示燈提示故障,同時停止運行以保護系統(tǒng),提高系統(tǒng)安全性;2)驅(qū)動器可由上位機軟件控制,系統(tǒng)可由上位機設(shè)定電機轉(zhuǎn)并實時顯示電機轉(zhuǎn)速曲線;3)由于采用分段自適應(yīng)PID速度控制策略,使得電機轉(zhuǎn)速更加穩(wěn)定,同時提高了電機的帶負載能力和抗干擾能力。
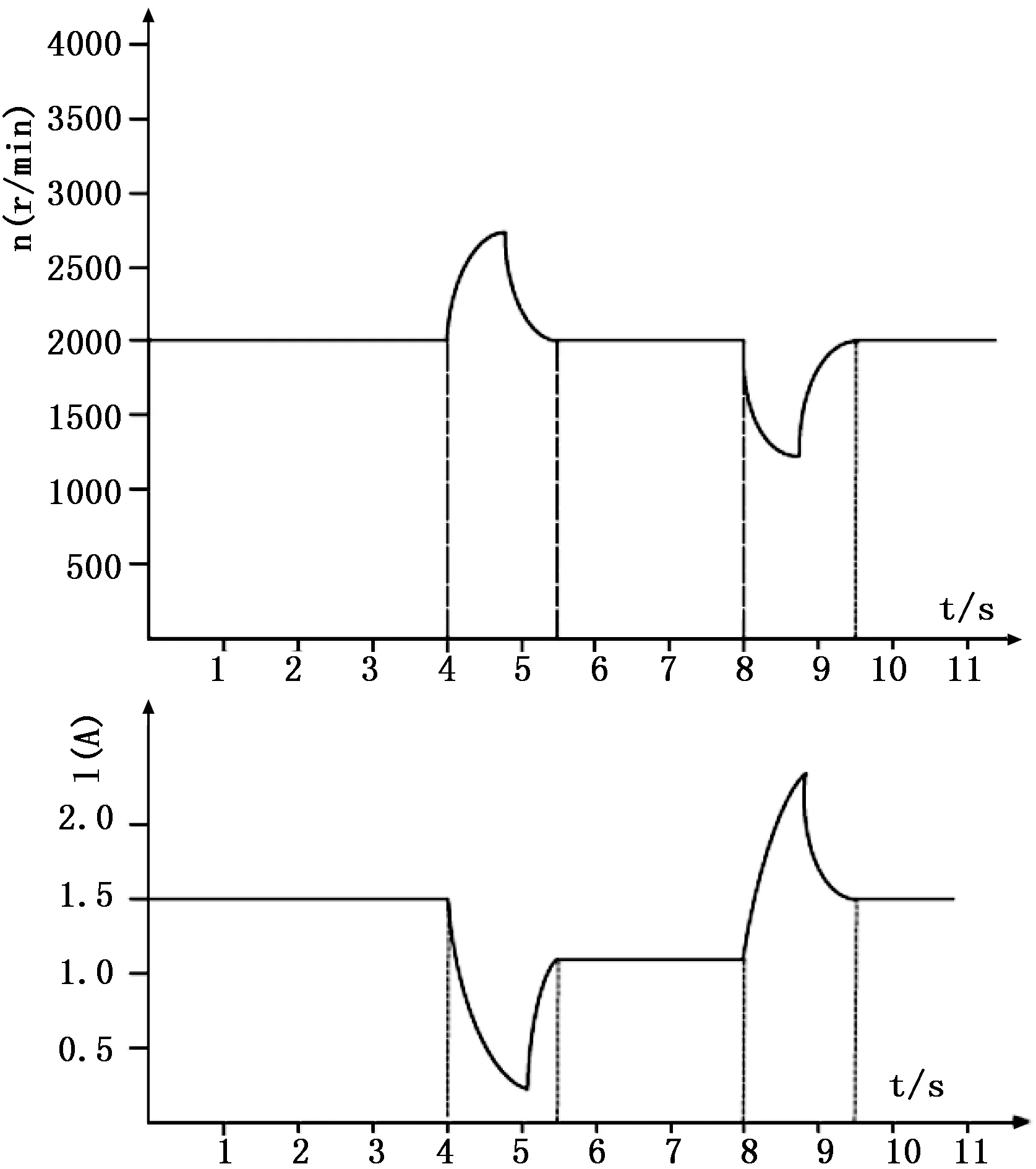
圖12 負載測試速度電流曲線圖
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45