基于VxWorks的復雜飛行器模擬平臺設計
2019-12-02 07:14:18
計算機測量與控制 2019年11期
關鍵詞:指令
(中國運載火箭技術研究院,北京 100076)
0 引言
地面測試是航天飛行器型號研制中的重要環節,對于發現系統缺陷、驗證系統設計以及檢驗產品性能等都起著重要的作用[1]。飛行器上綜合電子系統是整個飛行器的頂層調度系統,負責飛行器任務調度及數據管理,通過與各系統間的軟硬件接口交互,實現飛行器內部信息共享、功能集成及資源重組優化,完成飛行器任務管理、通信管理、時統管理、能源管理、信號采集及傳輸等[2]。通過構建飛行器模擬平臺,可實現基于綜合電子系統的整個飛行器軟硬件接口試驗驗證、整器狀態下匹配測試及模飛測試等。由于綜合電子系統與器上其他系統接口復雜,如RS422、LVDS、1553B、OC、模擬量采集、開關量采集、溫度量采集接口等,測試不僅需包含上述電氣接口,還需包含綜合電子系統遙控、遙測、數傳、時序等軟件接口,這就對飛行器模擬平臺的測試覆蓋性提出了很高要求。
目前,搭建針對綜合電子系統的測試平臺往往采用通用化的設計,以便能夠適應不同型號任務的需求,但這也導致了難以實現對系統全部功能的測試。文獻[3]提出了一種可重構擴展的模塊化通用測試方案,利用轉換層降低模塊間耦合性,可快速適應不同需求和硬件架構,但僅實現了對電氣接口的測試,難以針對具體任務進行測試。文獻[4]提出了針對衛星進行自動化測試方法,在目前衛星測試軟件的基礎上,改進了衛星的自動測試執行單元,并對衛星的故障判別系統進行了初步研究。文獻[5]、文獻[6]提出了通用衛星測試系統設計方法,采用分布式的設計方法實現測試系統的軟硬件架構,提高了衛星測試軟件的通用性和靈活性,但測試自動化程度較低,測試人需承擔的工作量較大。文獻[7]、文獻[8]針對衛星姿軌控分系統地面測試設備進行了軟件設計,通過動態地讀取配置文件實現對各個功能模塊的快速重構,使該測試軟件能夠滿足不同衛星的測試需求,但高通用化的軟件設計也導致了針對具體任務的測試覆蓋性較低。
為了實現飛行器電氣軟硬件接口的全面測試,本文設計并實現了一種基于VxWorks的復雜飛行器模擬平臺,實現不同飛行剖面下飛行器上綜合電子系統與外系統間的信息交互的地面平行演練,并通過地面實驗驗證了飛行器模擬平臺的接口正確性。
1 總體架構設計
根據任務需求,復雜飛行器模擬平臺由主控機、模擬器兩部分組成。其中,模擬器由CPCI工控機多個功能模塊組成,通過與綜合電子系統相連模擬外系統軟硬件接口;模擬器通過以太網與主控機相連,接收測試序列并反饋測試數據。飛行器模擬平臺總體架構如圖1所示。
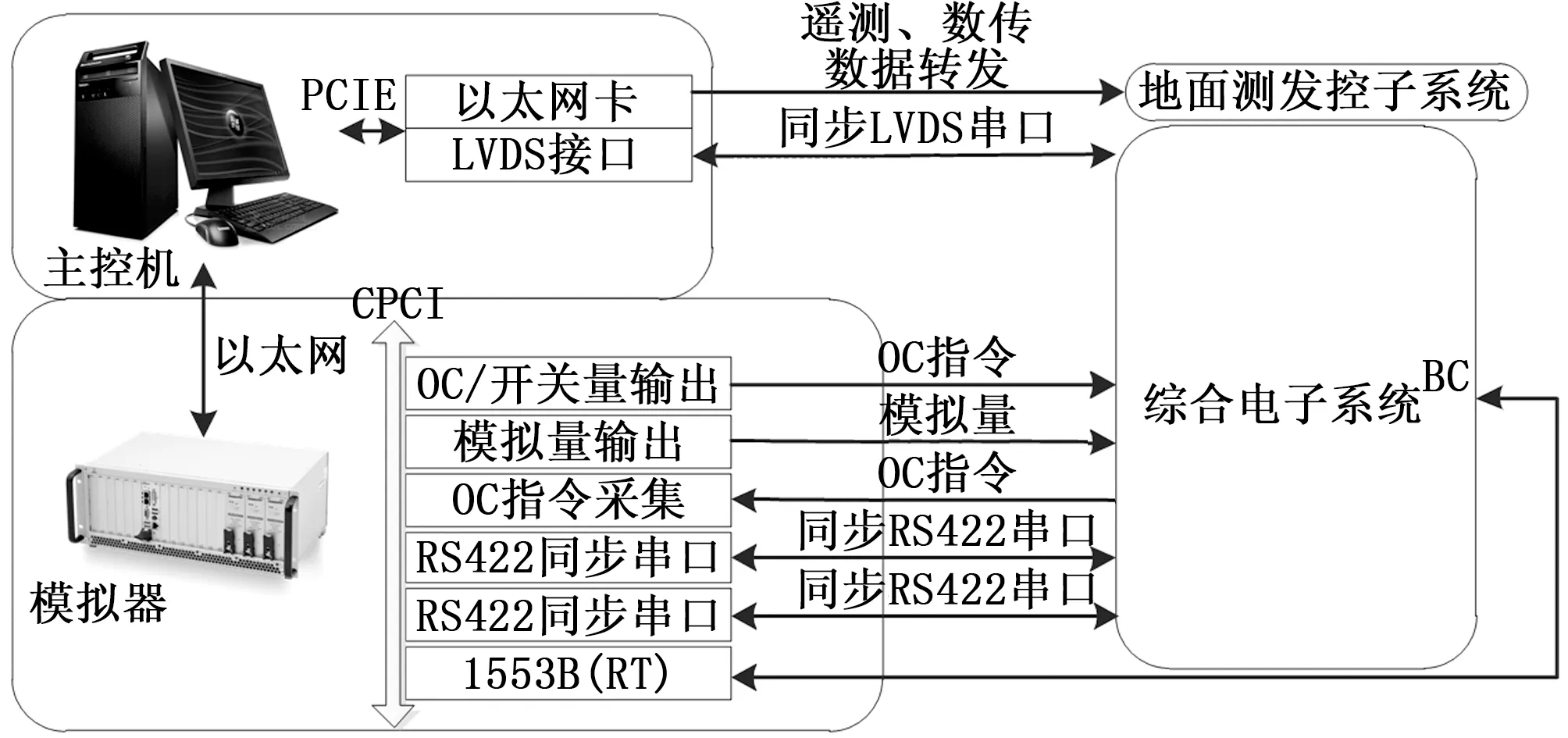
圖1 總體架構設計
模擬器通過RS422模塊實現與綜合電子系統之間的RS422通信,RS422接口工作在全雙工模式,其傳輸速率為16 384 bps、8 192 bps、4 096 bps三檔可調,通過多功能1553B模塊同時模擬多個遠程終端,通過OC指令模塊輸出共計80路OC門信號,脈沖寬度為80 ms,通過模擬量輸出模塊實現電壓模擬量的輸出,通過程控阻值電阻實現溫度模擬量的輸出[9],通過繼電器實現開關量的輸出。
主控機通過以太網絡與CPCI工控機進行通信,負責對每次測試所用的測試腳本進行編輯,并注入到CPCI工控機中,在測試過程中對綜合電子系統的狀態進行實時監控,對接收到的數據進行判讀和顯示,在測試完成后生成相應的測試報告。由于CPCI工控機難以滿足LVDS接口的傳輸速率需求,由主控計算機搭載LVDS功能模塊實現與綜合電子系統之間的LVDS通信,實現了兩類LVDS接口的信息傳輸,高速LVDS信號傳輸速率為12.5 Mbps、25 Mbps和50 Mbps,低速LVDS接口信號傳輸速率為1 835 008 bps和917 504 bps。
下面分別通過硬件方案設計、軟件方案設計介紹飛行器模擬平臺方案。
2 硬件方案設計
復雜飛行器模擬平臺硬件部分主要包括運行Windows操作系統的主控機、運行VxWorks操作系統的模擬器以及信號調理箱。模擬器通過信號調理箱連接或直接連接綜合電子系統,模擬其它外系統與綜合電子系統之間的信息傳輸;通過以太網絡與上位機進行交互,接收測試序列并反饋測試數據,硬件架構如圖2所示。
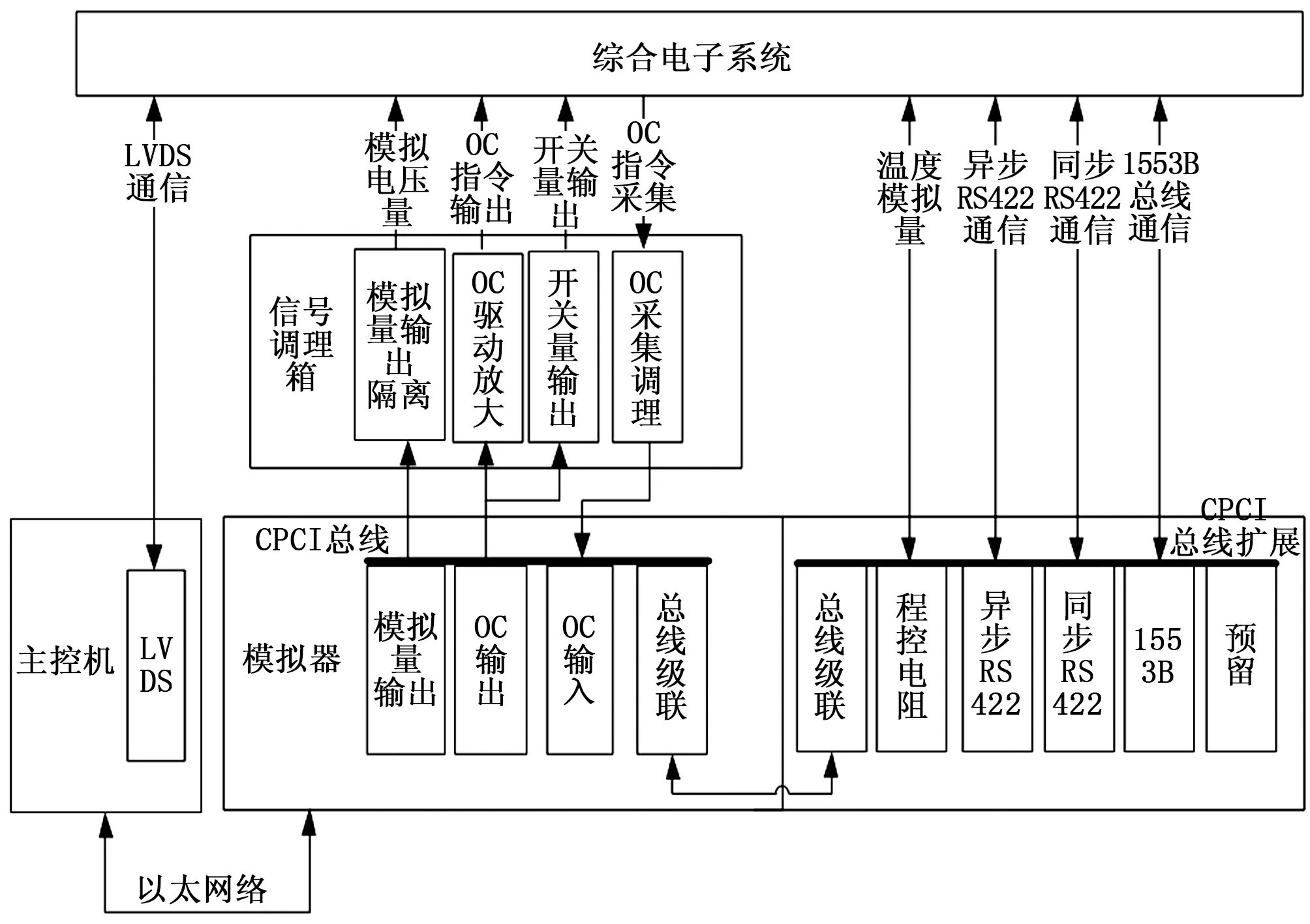
圖2 硬件方案設計
其中模擬器選擇兩臺標準3U CPCI工控機箱通過總線級聯板卡進行級聯,通過該板卡用戶可以使用一臺CPCI機箱直接控制另一臺CPCI機箱,實現對機箱內LVDS模塊、1553B模塊、模擬量輸出模塊等功能模塊的控制調度。
LVDS模塊提供20路LVDS差分輸出接口和20路LVDS差分采集接口,高速數字隔離器件(帶寬100 Mb/s)實現輸入輸出信號和FPGA 接口信號的隔離功能,增強系統的抗干擾能力;支持DMA讀寫功能,50 Mhz系統時鐘實測最大讀帶寬130 MB/s,寫帶寬84 MB/s。
1553B模塊基于多功能1553B板卡實現,同時模擬外系統的19個遠程終端,對通過1553B總線完成的遙測數據獲取、數傳數據獲取、注數轉發、任務管理、特征狀態字查詢、關鍵數據備份與恢復、內存下卸等功能進行驗證。
模擬量輸出模塊采用OPA4131NA芯片實現,能夠實現144通道12位DA輸出,每通道更新速率不低于200 kHz,采用高速數字隔離器對模擬電路和邏輯電路進行隔離,保護模擬器免受現場異常信號的破壞[10]。
信號調理箱根據綜合電子系統輸入輸出信號特性,提供通道的前后端電氣隔離功能,避免測試設備出現短路、掉電等異常現象時對綜合電子系統產生不利影響,完成模擬量的輸出;同時將OC輸出模塊進行驅動能力放大,將綜合電子系統輸出的OC指令轉換為TTL電平,完成OC指令的輸入輸出;通過開關量輸出調理電路,將OC輸出模塊輸出的信號調理成開關量信號。
主控機搭載LVDS板卡,實現與綜合電子系統進行LVDS接口的通信;通過以太網絡與模擬器進行通信,負責對每次測試所用的測試腳本進行編輯,并注入到模擬器中,在測試過程中對綜合電子系統的狀態進行實時監控,對接收到的數據進行判讀和顯示,在測試完成后生成相應的測試報告。
3 軟件方案設計
為了對綜合電子系統進行高可靠性、高實時性的測試,在模擬器上采用VxWorks 6.6操作系統,在Windriver Workbench 3.0開發環境下,通過調用各功能板卡的板級支持包,完成底層接口的開發和調試。模擬器軟件主要分為兩個部分:
1)板卡封裝調用:在VxWorks操作系統下對各功能板卡封裝成的庫函數進行調用,實現RS422、LVDS、1553B總線、OC門和模擬量輸出等接口。
2)測試流程執行:對上位機軟件下發的測試流程進行解析,依靠實時執行引擎運行測試流程,通過實時底層儀器驅動,驅動功能板卡完成相應的測試流程,最后將運行信息和過程數據實時回傳給上位機。
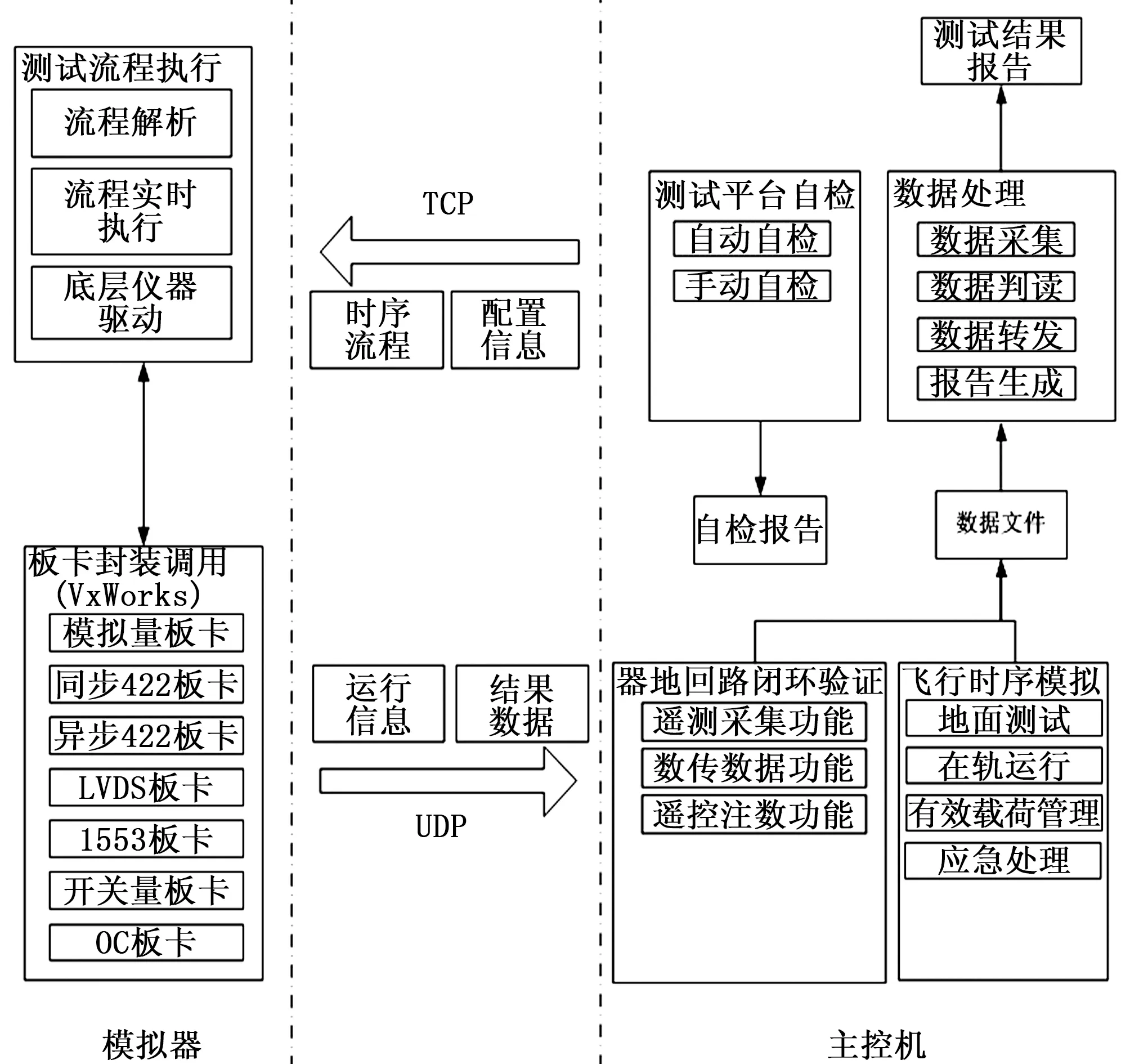
圖3 軟件方案設計
主控機采用Windows操作系統,將視圖與模型分離,基于WPF完成軟件界面編寫和優化,利用其數據綁定特性將視圖層與邏輯層分離,實現了低耦合高可重用性的Model-View-ViewModel架構,通過以太網絡與實現對模擬器的任務管理和狀態監控。主控機軟件主要分為4個部分:
1)測試平臺自檢:主控機軟件預設自檢流程,模擬器與自檢箱相連,開機后,上位機驅動下位機執行自檢流程;也可以對自檢流程進行配置和修改,手動對各個接口進行檢測。
2)器地回路閉環驗證:針對飛行任務過程中的遙測采集、數傳數據和遙控注數等重點功能,進行器地閉環回路的驗證。以遙測采集過程為例,主控機軟件首先驅動下位機進行向綜合電子系統發送遙測數據,綜合電子系統將遙測數據打包后傳給模擬器,模擬器將數據透傳給主控機,上位機對發送的數據和收到的數據進行對比,從而判斷綜合電子系統遙測采集功能是否正常。
3)飛行時序模擬:針對飛行過程中的一段飛行時序,上位機軟件將其編輯成測試序列,注入下位機執行后返回運行結果數據,上位機對序列中每條指令執行的正確性進行判斷,對綜合電子系統飛行過程中時序執行是否正常進行驗證。
4)數據處理:對測試過程中的數據進行采集,在測試過程中實時對數據進行處理,同時對數據進行二次組幀向測發控系統通過以太網絡進行轉發,測試完成后生成測試報告。
主控機通過TCP協議向模擬器發送命令,每條命令包含命令ID、板卡號、通道號、數據類型、數據內容五部分。對于發送周期較長或對實時性要求不高的數據,其發送由主控機控制。模擬器識別到該類數據的命令ID后,在相應的板卡通道上發送主控機傳輸的數據;對于發送周期較短或對實時性要求較高的數據,其發送由模擬器自行控制,主控機可以對其進行數據更新,模擬器識別到該類數據的命令ID后,更新對應寄存器中的數據,待下個發送周期時再發送更新后的數據,以免影響當前周期的數據發送。模擬器將執行結果通過UDP發送給主控機,其中包含發送的數據內容、板卡號通道號和發送時間等相關信息。主控機收到數據后進行判讀,并實時顯示在軟件界面上。
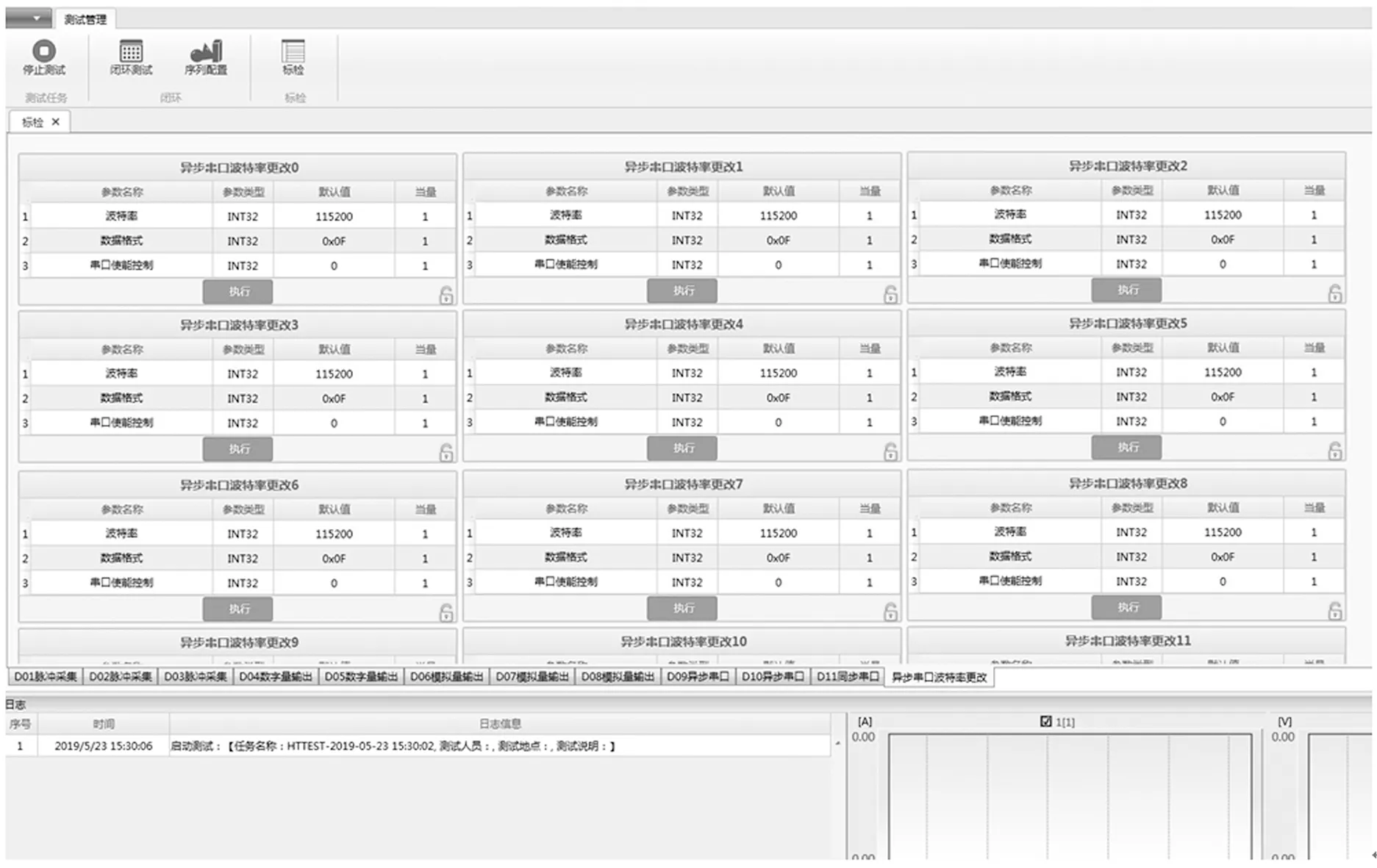
圖4 軟件初始化界面
4 實驗結果與分析
根據上述軟硬件設計方案,在工控機上基于VxWorks操作系統完成接口數據收發,主控計算機基于WPF完成人機交互,設計了復雜飛行器模擬平臺,對綜合電子系統進行實驗驗證。
4.1 遙測采集功能驗證
飛行器模擬平臺模擬外系統向綜合電子系統發送遙測源包,綜合電子系統將遙測源包組成遙測幀后發回到等效器中,等效器將發送和收回的數據進行對比,從而判斷綜合電子系統遙測采集功能的正確性。

圖5 遙測采集功能驗證
遙測采集功能驗證過程中,等效器讀取預先存儲在.dat文件中的遙測源包數據,分別將其通過RS422接口和1553B總線注入到綜合電子系統中;等效器通過RS422接口接收綜合電子系統調度后組建的遙測幀,幀同步碼、幀計數、校驗和等經判讀均符合通信協議的要求,收回的遙測幀中數據與發送的遙測源包中數據一致,經驗證了綜合電子系統遙測采集功能符合要求;同時模擬平臺將遙測源包添加時間碼后轉發到測發控子系統,便于進行后續數據解析和判讀。
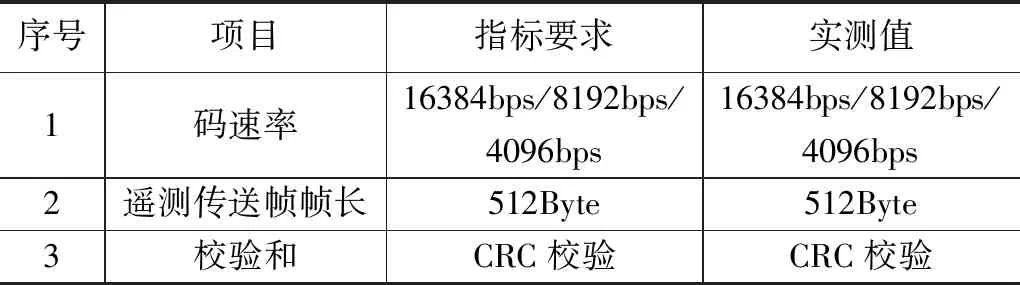
表1 遙測采集功能驗證結果
4.2 數傳數據功能驗證
飛行器模擬平臺模擬外系統向綜合電子系統發送數傳源包,綜合電子系統將數傳源包組成數傳幀后發回到等效器中,等效器將發送和收回的數據進行對比,從而判斷綜合電子系統數傳數據功能的正確性。

圖6 數傳數據功能驗證
數傳數據功能驗證過程與遙測采集類似,數傳源包通過RS422接口、LVDS接口和1553B總線注入到等效器中,等效器通過LVDS接口接收數傳幀,經驗證綜合電子系統數傳數據功能運行正常;數傳數據進行拼包后添加時間碼,發往測發控系統進行數據解析和判讀。

表2 數傳數據功能驗證結果
4.3 遙控注數功能模擬
飛行器模擬平臺模擬外系統向綜合電子系統發送遙控指令(包括直接OC指令和遙控注數幀),綜合電子系統解析遙控指令后,向等效器發送間接指令和遙控注數指令,等效器將發送的指令和收回的指令進行對比,從而判斷綜合電子系統遙控注數功能的正確性。
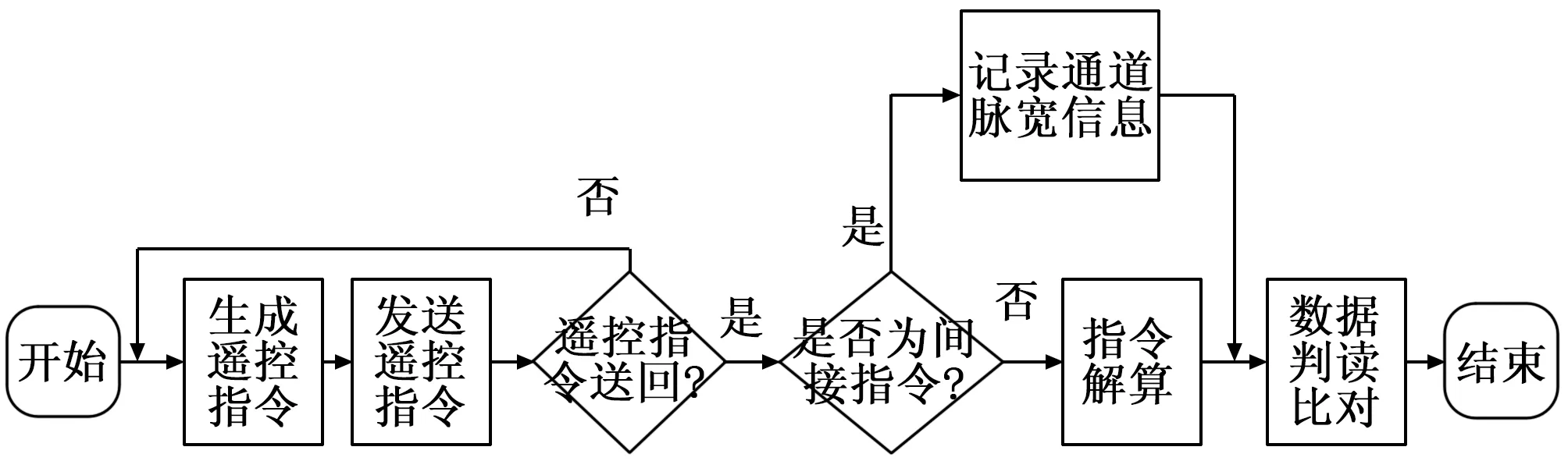
圖7 遙控注數功能驗證
遙控注數功能驗證時通過主控計算機界面選擇本次測試的遙控指令,根據指令類型不同等效器向綜合電子系統通過OC門發送直接指令或通過RS422接口發送遙控注數包,接收綜合電子系統發回的遙控指令并進行解析,經驗證綜合電子系統遙控注數功能符合通信協議的要求。
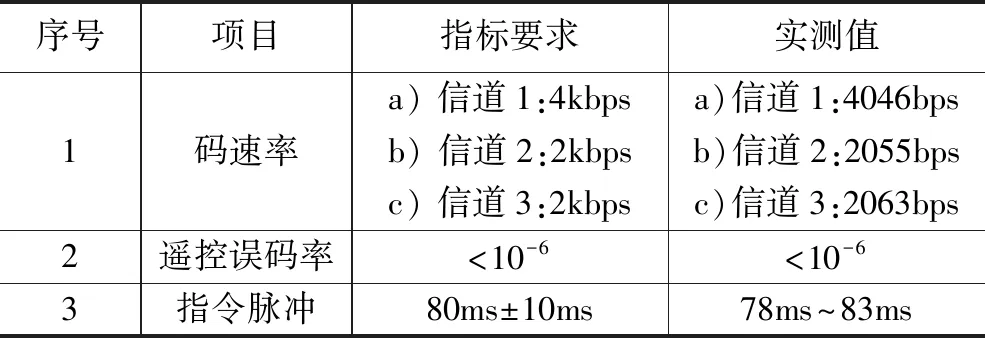
表3 遙控注數功能驗證結果
4.4 飛行時序模擬
飛行器模擬平臺按照通信協議及程控任務和時序管理要求,模擬外系統在飛行過程中與綜合電子系統之間的信息交互,同時監視綜合電子系統的狀態,實時顯示從綜合電子系統收到的指令并進行判讀。上位機軟件默認狀態下進行整個飛行時序的模擬,同時具備對飛行時序中時序動作進行編排的能力,對于單條時序動作,還能夠對其觸發條件和時間延遲進行修改。
在飛行時序模擬的過程中,首先通過等效器對本次測試的測試序列進行編輯,在飛行時序的基礎上針對本次測試內容進行時序動作的增刪和修改;等效器按照測試序列中預定的時間向綜合電子系統發送相應指令,包括直接OC指令和通過RS422接口發送的遙控注數包;等效器對綜合電子系統是否正確接收并執行了遙控指令進行監測,對于直接OC指令,解析遙測數據從而判斷是否正確接收并執行了直接OC指令;對于通過RS422發送的遙控包,綜合電子系統是否飛行時序中的約定通過RS422接口、1553B總線或OC門電路發出了對應的遙控指令,并記錄收到這些遙控指令的時間,若綜合電子系統正確執行了這些遙控指令并且延時在預期范圍內,判定本條時序動作執行成功;依次向下執行測試序列中的每條時序動作,測試序列執行完畢后生成測試報告。
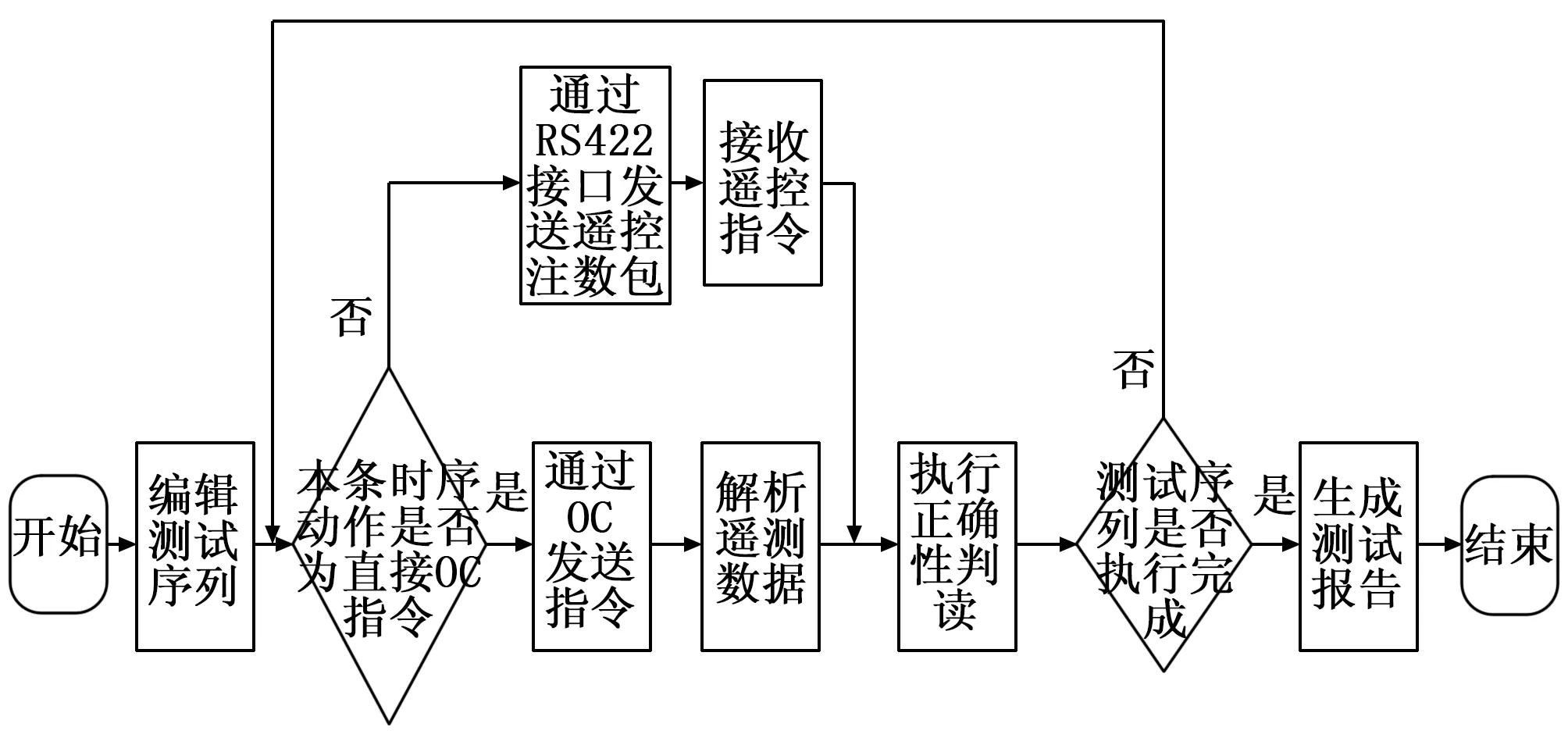
圖8 飛行時序模擬
飛行時序模擬驗證選取了15條相鄰的飛行時序動作,按照飛行任務剖面中的時間間隔設置其觸發時間。在某一條時序動作到達預定的觸發時間時,等效器發送相應的遙控指令,并判斷綜合電子系統響應的正確性,若執行正確則繼續向下執行,直到執行完整個測試序列。其它時序段測試效果與類似,均按要求完成指令響應,模擬平臺完成了飛行時序中軟硬件接口的模擬,滿足設計要求。
5 結論
本文基于VxWorks系統設計了復雜飛行器模擬平臺,主控機完成人機交互,并將測試任務注入到模擬器中,模擬器對測試任務解析執行,并將執行結果送回到主控機中。經過試驗驗證,得到以下結論:
1)模擬平臺基于綜合電子系統,通過RS422、LVDS和1553B等電氣接口,實現了對飛行器遙測采集、數傳數據、遙控注數等功能的驗證。驗證過程中模擬平臺同時作為數據的發送端和接收端,對器地回路進行了閉環驗證;
2)按照飛行器飛行時序剖面的要求,模擬飛行器上的軟硬件接口,對綜合電子系統在飛行過程中的運行狀態進行了驗證,進而完成了對飛行時序的模擬;
3)系統采用通用化及模塊化設計思路,便于后續進行功能擴展;人機交互界面簡單,自動化程度高,在保證了測試覆蓋性的同時,提高了測試過程的實時性。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27