操控中的一種半程載波捕獲與跟蹤方法
2019-12-02 07:14:36
計(jì)算機(jī)測(cè)量與控制 2019年11期
關(guān)鍵詞:信號(hào)
(1.航天器在軌故障診斷與維修重點(diǎn)實(shí)驗(yàn)室,西安 710043;2.宇航動(dòng)力學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,西安 710043)
0 引言
在航天測(cè)控中,載波捕獲與跟蹤是星地通信的關(guān)鍵技術(shù)之一,用于保障遙控信號(hào)、遙測(cè)信號(hào)以及測(cè)距信號(hào)的可靠接收與發(fā)送,實(shí)現(xiàn)星地信息傳遞與交互[1-2]。得益于軟件無(wú)線電技術(shù)快速發(fā)展,接收機(jī)多采用FFT搜索算法、步進(jìn)掃描搜索算法等技術(shù)進(jìn)行載波捕獲,通過(guò)軟件或者硬件來(lái)實(shí)現(xiàn)[3-4]。例如在導(dǎo)航信號(hào)的載波捕獲中,文獻(xiàn)[5]將BOC信號(hào)帶通濾波后進(jìn)行延遲采樣自相關(guān)處理,可降低計(jì)算復(fù)雜度且自相關(guān)曲線不存在過(guò)零點(diǎn);文獻(xiàn)[6]針對(duì)BOC信號(hào)單邊帶捕獲方法中的信號(hào)功率損失,提出部分相干自相關(guān)算法,可提高信噪比1.8 dB;文獻(xiàn)[7]則在GPS信號(hào)的線性調(diào)頻Z變換處理基礎(chǔ)上擴(kuò)展信號(hào)相干積分時(shí)間,實(shí)現(xiàn)較低計(jì)算負(fù)荷下的較高精度的載波頻率捕獲。針對(duì)測(cè)控中的USB信號(hào)[8]捕獲,文獻(xiàn)[9]提出利用PM信號(hào)頻譜對(duì)稱特性計(jì)算殘差載波頻率,并采用鎖頻鎖相環(huán)實(shí)現(xiàn)PM信號(hào)精確捕獲與跟蹤,可降低載波假鎖概率;文獻(xiàn)[10]著眼于高值副載波調(diào)制度下的載波錯(cuò)鎖或假鎖問(wèn)題,提出利用奇異值分解降噪實(shí)現(xiàn)特征信號(hào)提取,能改善載波捕獲與跟蹤性能。一般而言,載波捕獲性能與軟硬件成本之間存在正比關(guān)系:性能高,則成本也高[11]。
從實(shí)際在軌應(yīng)用情況來(lái)看,載波捕獲性能還受到復(fù)雜的空間環(huán)境因素影響[12-13],例如在熱輻射、紫外照射、粒子輻射等作用下,衛(wèi)星接收機(jī)性能會(huì)不可避免地出現(xiàn)衰減、損傷、甚至失效。在大數(shù)量衛(wèi)星集中監(jiān)控與管理中,如何保障衛(wèi)星應(yīng)答機(jī)高效、可靠、穩(wěn)定工作,一直是操控工程師關(guān)注的重點(diǎn)之一。
這里以某低軌衛(wèi)星在軌管理為例,針對(duì)其應(yīng)答機(jī)載波鎖定時(shí)間較短的問(wèn)題進(jìn)行遙測(cè)參數(shù)關(guān)聯(lián)與分析,給出一種半程載波捕獲與跟蹤方法,減小載波捕獲的時(shí)間開(kāi)銷,為應(yīng)急操控或異常處置提供技術(shù)支持。
1 應(yīng)答機(jī)老化
某太陽(yáng)同步、近圓軌道衛(wèi)星在軌工作10余年,降交點(diǎn)地方時(shí)為10:30 AM,高度約640 km。衛(wèi)星應(yīng)答機(jī)AGC(Auto Gain Control,自動(dòng)增益控制)電壓遙測(cè)與載波鎖定參數(shù)變化如圖1所示(圖中橫軸為積秒,表征一日之內(nèi)的秒計(jì)數(shù),起點(diǎn)為某日零點(diǎn),終點(diǎn)為次日零點(diǎn),單位s)。2014年后,應(yīng)答機(jī)性能出現(xiàn)嚴(yán)重下降:一方面,載波鎖定時(shí)的AGC出現(xiàn)較大幅度的衰減(由原先的3.0 V以上減小至現(xiàn)今的1.0 V以下),說(shuō)明應(yīng)答機(jī)靈敏度顯著退化;另一方面,載波鎖定時(shí)長(zhǎng)也大大縮短,對(duì)操控中的遙控注入產(chǎn)生較大影響。自是,應(yīng)答機(jī)進(jìn)入降級(jí)應(yīng)用:地面發(fā)射機(jī)功率800 W,天線口徑不低于10 m,最高仰角80°以上。
此外,應(yīng)答機(jī)工作溫度對(duì)載波鎖定時(shí)長(zhǎng)的影響比較顯著:溫度越低,時(shí)間越長(zhǎng);溫度越高,時(shí)間越短。因此,衛(wèi)星應(yīng)答機(jī)溫度成為載波捕獲與跟蹤的關(guān)鍵約束。
在軌期間,應(yīng)答機(jī)溫度變化如圖2所示(圖中S表示夏至日,W表示冬至日)。以軌道周期為短周期(約5 850 s):衛(wèi)星進(jìn)地影后,蓄電池放電工作并散熱,熱控系統(tǒng)隨之響應(yīng)并進(jìn)行降溫控制,大致在地影區(qū)的中間附近時(shí),應(yīng)答機(jī)溫度達(dá)到極大值;約半個(gè)軌道周期后,衛(wèi)星進(jìn)入陽(yáng)照區(qū),熱控降溫基本完成,應(yīng)答機(jī)溫度達(dá)到極小值,此時(shí)衛(wèi)星與太陽(yáng)的星下點(diǎn)地理緯度基本相同。具體情形可參見(jiàn)圖3中的蓄電池放電電流、溫度以及應(yīng)答機(jī)溫度的變化過(guò)程(圖中將蓄電池溫度與放電電流分布放大了4倍與3倍)。
以年周期為長(zhǎng)周期:冬至前后,溫度為全年高位;夏至前后,則為低位;春秋兩季,則處于最高位與最低位之間。以整個(gè)衛(wèi)星在軌時(shí)段為長(zhǎng)期段:前期溫度低,后期溫度高,年均溫度升高約0.3 ℃。以上溫度變化均與空間環(huán)境影響有關(guān):溫度短周期變化主要源于衛(wèi)星進(jìn)出地影時(shí)的太陽(yáng)輻照變化,長(zhǎng)周期變化則主要是軌道運(yùn)動(dòng)下的太陽(yáng)輻射熱流變化所致(光照角與日地距離變化),長(zhǎng)期變化主要是紫外輻照下的涂層性能退化[14]引起。

圖1 應(yīng)答機(jī)AGC與鎖定變化

圖2 應(yīng)答機(jī)溫度變化

圖3 應(yīng)答機(jī)溫度與蓄電池放電電流
另外,應(yīng)答機(jī)溫度還受到空間輻射環(huán)境下的單粒子閂鎖(Single Event Latchup,SEL)效應(yīng)[15]的影響:器件發(fā)生SEL效應(yīng)后一般會(huì)有溫度升高現(xiàn)象,從而給周邊器件帶來(lái)熱影響。
因此,應(yīng)答機(jī)溫度處于高位時(shí),載波捕獲與跟蹤相對(duì)困難,急需操控調(diào)整與改善。
2 半程載波捕獲與跟蹤
對(duì)于地基測(cè)控而言,低軌衛(wèi)星每個(gè)測(cè)控窗口的跟蹤時(shí)間相對(duì)較短,當(dāng)跟蹤圈次內(nèi)的天線仰角最大值為90°時(shí),理論跟蹤時(shí)間最長(zhǎng)。考慮近圓軌道情形,則最長(zhǎng)跟蹤時(shí)間t可用下式表示:
(1)
式中,Re為地球半徑,6 378.137 km;H為軌道高度,km;μ為常數(shù),3.986×105km3·s-2;E為遮蔽角,rad。不同軌道高度下的衛(wèi)星跟蹤時(shí)間tpre如圖4所示。
顯然,同樣軌道高度下,遮蔽角越大則跟蹤時(shí)間越短;同樣遮蔽條件下,軌道越高則跟蹤時(shí)間越長(zhǎng)。以軌道高度600 km為例,遮蔽角分別為0、7°時(shí),跟蹤時(shí)間對(duì)于約為770 s、570 s,兩者之間相差約200 s。可見(jiàn),遮蔽角對(duì)于跟蹤時(shí)間的影響較為明顯,在實(shí)際中必須考慮這一因素影響。此外,這里以最高仰角90°作為參考,但由于目標(biāo)過(guò)頂[16]時(shí)的天線高轉(zhuǎn)速影響,過(guò)頂前后的跟蹤時(shí)間為非遙控時(shí)間,因此,可遙控時(shí)間一般要小于跟蹤時(shí)間,這樣使得可資利用的上行遙控時(shí)間窗口進(jìn)一步縮短。

圖4 跟蹤時(shí)間約束
在遙控注入前,需要進(jìn)行載波捕獲與跟蹤,其中一個(gè)重要環(huán)節(jié)是載波頻率掃描[3,8,17]。假定頻率為線性鋸齒波掃頻方式,則單周期下的掃頻時(shí)間tswe可用下式表示為:
tswe=4w/v
(2)
式中,w為鋸齒波頻率掃頻幅度(類似于正弦波振幅),kHz;v為掃頻速度,kHz·s-1。不同掃幅、掃速下的掃頻時(shí)間tswe如圖5所示。
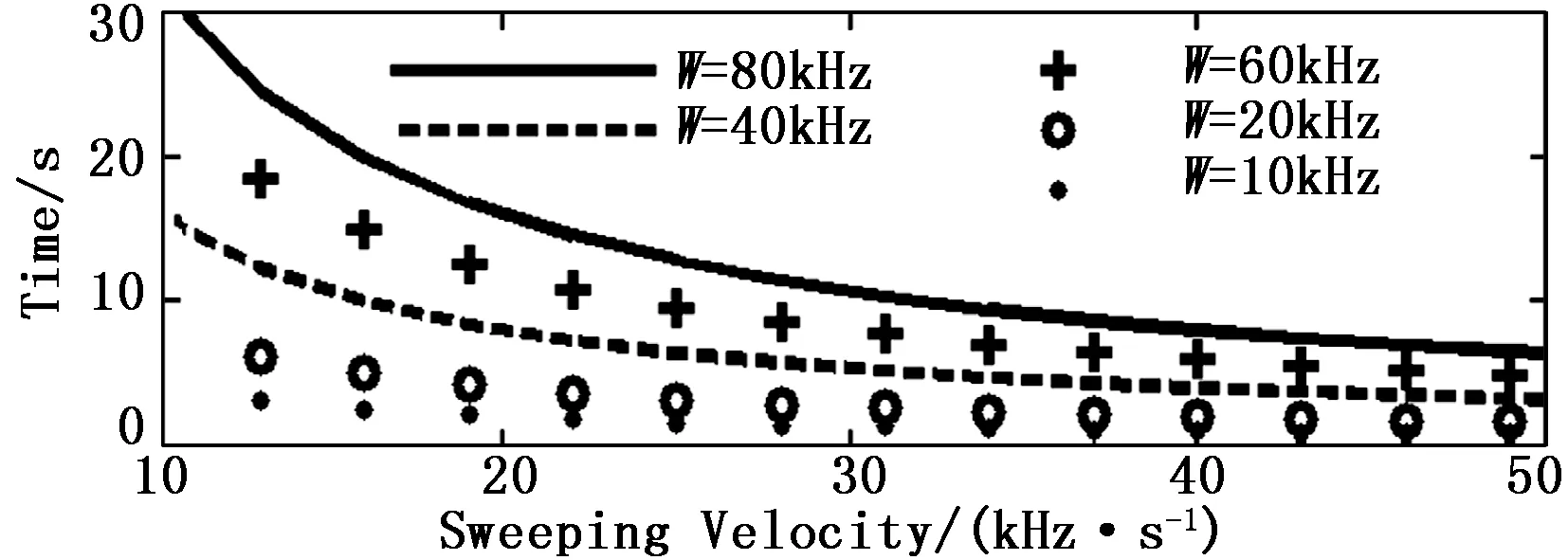
圖5 掃頻時(shí)間約束
由圖5可知,頻率掃幅越小、掃速越快,則掃描時(shí)間越短;反之,掃幅越大、掃速越慢,則掃描時(shí)間越長(zhǎng)。以掃幅40 kHz、掃速20 kHz·s-1為例,對(duì)應(yīng)掃頻時(shí)間為8 s。正常情況下,地面啟動(dòng)掃頻程序后,手動(dòng)操作下一般需數(shù)個(gè)周期才能完成載波捕獲與跟蹤,所需時(shí)間要大于8 s。
但是,一旦衛(wèi)星在冬至前后出現(xiàn)SEL事件,極可能導(dǎo)致應(yīng)答機(jī)溫度升至25.9~26.2 ℃區(qū)間,載波鎖定時(shí)間將非常短暫,長(zhǎng)時(shí)間的載波掃描不利于快速的信號(hào)捕獲和遙控指令發(fā)送。后期,隨著衛(wèi)星老化加劇,整星溫度很可能進(jìn)一步攀升,則當(dāng)應(yīng)答機(jī)溫度接近26.2 ℃,可利用的載波鎖定時(shí)間更短,需要調(diào)整操控方式,爭(zhēng)取將更寶貴的時(shí)間用于指令發(fā)送和SEL事件處置。
顯然,若最高仰角在80~85°范圍內(nèi):則不需考慮過(guò)頂影響,天線可全程穩(wěn)定跟蹤目標(biāo);而過(guò)頂前后的上行信道鏈路增益損失最小,同時(shí)多普勒頻移也最低(接近于0),這時(shí)衛(wèi)星接收機(jī)載波捕獲成功的概率最大。因此,取消載波頻率掃描,充分利用過(guò)頂前后的信號(hào)功率強(qiáng)、多普勒頻移低的有利時(shí)機(jī),衛(wèi)星接收機(jī)可自動(dòng)快速完成載波頻率捕獲與轉(zhuǎn)發(fā),實(shí)現(xiàn)載波鎖定時(shí)長(zhǎng)最大化。
3 操控檢驗(yàn)
鑒于冬至前后的應(yīng)答機(jī)溫度為全年最高,載波捕獲與跟蹤最為困難,這里以冬至期間發(fā)生的GPS接收機(jī)(軌道板已關(guān)閉)的SEL事件處置為例,檢驗(yàn)半程載波捕獲與跟蹤的效果,如圖6所示。

圖6 SEL事件檢驗(yàn)
SEL事件發(fā)生后,GPS接收機(jī)溫度升高幅度較大,超過(guò)8.0 ℃;在SEL事件的次生影響下,應(yīng)答機(jī)溫度也逐漸升高,大致分為兩個(gè)階段,先期2軌升溫約0.3 ℃,后期5軌又升溫約0.3 ℃,累積升溫約0.6 ℃。應(yīng)答機(jī)溫度升高后,載波捕獲相對(duì)困難,采用半程載波捕獲與跟蹤方法,在過(guò)頂前后實(shí)現(xiàn)載波鎖定,時(shí)長(zhǎng)約30s,對(duì)應(yīng)溫度約25.9 ℃。在30 s的鎖定時(shí)間內(nèi),地面抓緊時(shí)機(jī)發(fā)送指令對(duì)GPS接收機(jī)進(jìn)行斷電、加電,操控成功。其后,應(yīng)答機(jī)與GPS接收機(jī)溫度都逐漸下降至正常水平。最后,再次使用半程載波捕獲與跟蹤方法進(jìn)行測(cè)控,在目標(biāo)過(guò)頂前后實(shí)現(xiàn)載波捕獲,鎖定時(shí)長(zhǎng)超過(guò)90 s,可供業(yè)務(wù)、軌道等日常數(shù)據(jù)注入使用。
使用半程載波捕獲與跟蹤方法統(tǒng)計(jì)得到的高溫狀態(tài)下的載波鎖定時(shí)長(zhǎng)如圖7所示。在25.9~26.2 ℃區(qū)間內(nèi),時(shí)長(zhǎng)大致從30 s線性降至0;在應(yīng)答機(jī)溫度超過(guò)26.2 ℃后,無(wú)法實(shí)現(xiàn)載波捕獲。
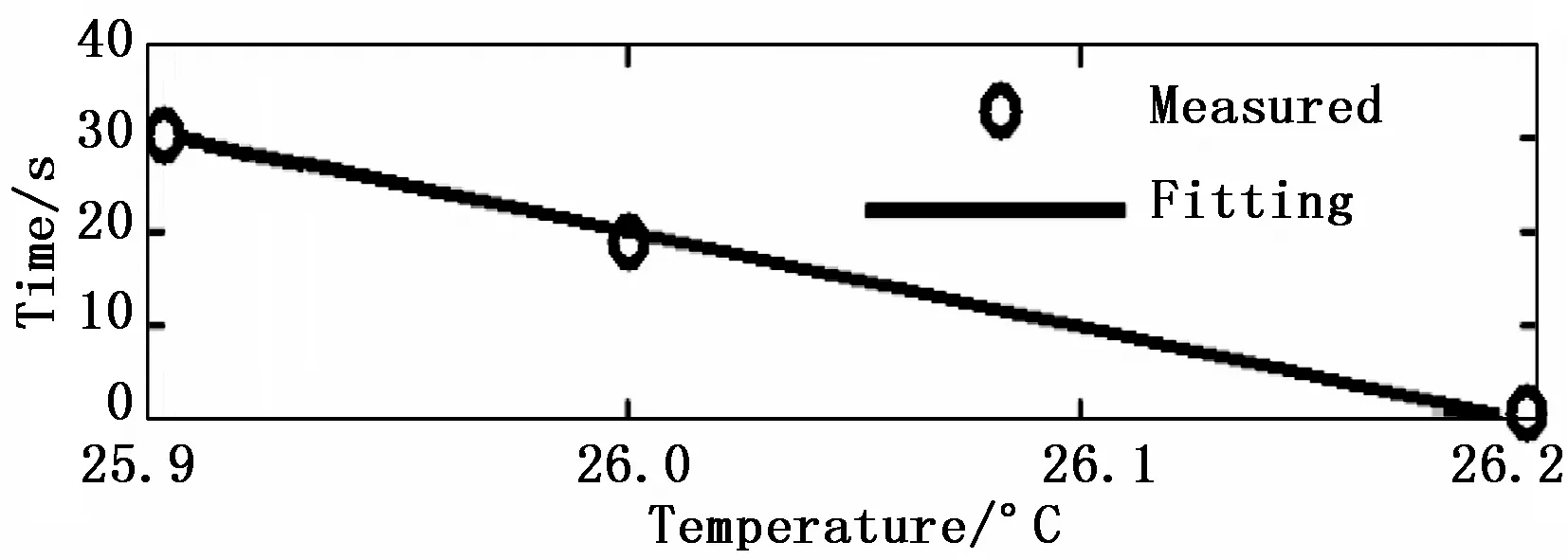
圖7 溫度與載波鎖定時(shí)長(zhǎng)
以掃頻幅度60 kHz、掃速20 kHz·s-1計(jì),假定自動(dòng)雙捕時(shí)需半個(gè)周期實(shí)現(xiàn)載波捕獲,則節(jié)省的時(shí)間其實(shí)很有限,只有6s。但考慮后期衛(wèi)星老化下應(yīng)答機(jī)溫度繼續(xù)升高、以及冬至期間單粒子事件多發(fā)[12]導(dǎo)致應(yīng)答機(jī)溫度可能更高甚至接近26.2 ℃時(shí),則本方法更能發(fā)揮其作用。仍然以GPS接收機(jī)SEL事件處置為例:只要載波鎖定時(shí)間在1~2 s內(nèi),則地面以1 s為周期重復(fù)發(fā)送斷電指令,可實(shí)現(xiàn)GPS接收機(jī)關(guān)機(jī)以及降溫;在其后的時(shí)間里,再進(jìn)行開(kāi)機(jī)以及其它操控工作。
文獻(xiàn)[18]在處置Dellingr衛(wèi)星的星務(wù)計(jì)算機(jī)63 s周期下的連續(xù)自動(dòng)重啟異常時(shí),通過(guò)地面重復(fù)發(fā)送以數(shù)秒鐘為周期的重啟指令達(dá)4 min以上,迫使星務(wù)計(jì)算機(jī)不斷重啟、無(wú)暇顧及通信服務(wù);而電源下位機(jī)確認(rèn)連續(xù)4 min的通訊中斷后,為其負(fù)載實(shí)施斷電、加電操作;星務(wù)計(jì)算機(jī)由此實(shí)現(xiàn)斷電與重啟,最終異常得以清除。因此,在衛(wèi)星異常處置操控中,事件調(diào)度與時(shí)序銜接很關(guān)鍵,而時(shí)間預(yù)算則是這個(gè)關(guān)鍵的重要前提之一;節(jié)省的6s雖然短暫,但能發(fā)揮很好作用,例如延壽。文獻(xiàn)[19-20]認(rèn)為衛(wèi)星延壽是建立在空間環(huán)境、推進(jìn)劑、能源、熱控等多種約束條件下的綜合優(yōu)化結(jié)果,在將來(lái)的工作中,還需要繼續(xù)尋求應(yīng)答機(jī)最低溫度超過(guò)26.2 ℃后的操控應(yīng)對(duì)手段,盡力保障載荷延壽工作。
4 結(jié)論
低軌衛(wèi)星長(zhǎng)期運(yùn)行后,應(yīng)答機(jī)載波捕獲對(duì)于環(huán)境溫度極為敏感,溫度超過(guò)26.2 ℃時(shí),無(wú)法實(shí)現(xiàn)載波捕獲;溫度在25.9 ℃時(shí),可資利用的載波鎖定時(shí)長(zhǎng)僅30 s;利用半程載波捕獲與跟蹤方法,可減少載波捕獲的時(shí)間消耗6 s以上,適用于應(yīng)答機(jī)溫度處于高位(特別是接近于截止溫度)時(shí)的緊急事件的處理,減緩溫敏影響,實(shí)現(xiàn)載荷工作延壽。后續(xù),還需尋求進(jìn)一步的溫敏應(yīng)對(duì)方法,為載荷延壽提供操控技術(shù)支持。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06