柔性航天器姿態(tài)機動軌跡設(shè)計及跟蹤控制
2019-12-03 02:06:10張秀云朱婉婉劉文靜
宇航學(xué)報 2019年11期
張秀云,宗 群,朱婉婉,劉文靜
(1. 天津大學(xué)電氣自動化與信息工程學(xué)院,天津 370002;2. 北京控制工程研究所,北京 100190)
0 引 言
近年來,隨著航天科技的飛速發(fā)展,一方面為降低發(fā)射成本,現(xiàn)代航天器廣泛采用輕質(zhì)柔性附件;另一方面隨著航天需求的不斷增加,航天器在軌時間要求越來越長,因此柔性太陽帆板等尺寸逐漸增大。在航天器完成大角度機動動作時,若機動速度過快,則會導(dǎo)致劇烈的柔性振動,影響系統(tǒng)穩(wěn)定性;但若機動速度過慢,則不能滿足機動快速性需求。因此,柔性航天器姿態(tài)機動存在“快速性”及“穩(wěn)定性”的矛盾,如何保證既快又穩(wěn)的姿態(tài)機動、并有效抑制柔性振動是目前研究的熱點及難點問題。
為進行航天器姿態(tài)機動,快速有效的完成航天任務(wù),首先需要設(shè)計姿態(tài)機動軌跡,若不對軌跡進行規(guī)劃,直接由初始點機動至終止點,可能會難以滿足機動時間要求,且?guī)順O大的柔性振動。文獻[1]針對柔性航天器姿態(tài)機動問題,利用控制力矩分配的優(yōu)化策略設(shè)計了一種新型機動曲線,但其僅考慮了機動快速性,未考慮系統(tǒng)穩(wěn)定性。文獻[2]通過傅里葉分析Bang-Coast-Bang(BCB)路徑譜以確定柔性航天器姿態(tài)機動軌跡,但其僅單純考慮了系統(tǒng)穩(wěn)定性。以上文獻在姿態(tài)機動軌跡設(shè)計過程中,均單一考慮了機動的“快速性”或“穩(wěn)定性”,未進行兩者的綜合考慮。
針對柔性航天器主動振動抑制問題,國內(nèi)外學(xué)者進行了大量研究。輸入成形器(Input shaper,IS)是一種有效抑制振動的前饋控制方法,得到了廣泛的應(yīng)用[3]。輸入成形器是指具有一定作用幅值及作用時間的脈沖序列,利用合適的輸入成形器與系統(tǒng)參考指令相卷積,改變系統(tǒng)輸入的形狀和作用位置點,達到抑制振動的目的[4]。近年來,輸入成形器發(fā)展了多種形式[5]:Zero-Vibration(ZV),Zero Vibration and Derivative (ZVD),Extra-Insensitive (EI)等,但在作用時間及魯棒性方面仍然是難點問題。
針對柔性航天器姿態(tài)控制問題[6],輸入成形器與控制方法的結(jié)合也被廣泛應(yīng)用[7-8]。文獻[9-10]利用輸入成形解決大型航天器柔性附件振動問題,取得了很好的抑制效果。文獻[11-12]通過結(jié)合輸入成形器及滑模控制方法,解決了干擾影響下的柔性航天器控制,但其僅能保證姿態(tài)的漸近收斂。為避免控制器設(shè)計過程中必須不確定上界已知的限制,自適應(yīng)算法被廣泛應(yīng)用于滑模控制中[13-16],如何設(shè)計能夠避免增益過估計、且能保證跟蹤誤差有限時間收斂到零的自適應(yīng)滑模控制器是研究的重點問題。
在上述研究基礎(chǔ)上,本文針對柔性航天器大角度姿態(tài)機動問題,采用優(yōu)化與控制綜合方法,綜合考慮機動快速性及穩(wěn)定性,優(yōu)化得到姿態(tài)機動軌跡,并設(shè)計新型輸入成形器-無過估計的自適應(yīng)有限時間控制器,有效減小輸入成形器作用時間,抑制柔性振動,實現(xiàn)對優(yōu)化軌跡的快速高精度跟蹤控制。
1 航天器姿態(tài)模型建立
采用單位四元數(shù)描述航天器姿態(tài),則航天器運動學(xué)模型描述為[17]:
(1)

剛?cè)狁詈虾教炱髯藨B(tài)動力學(xué)方程及柔性振動方程可描述為:
(2)

根據(jù)文獻[18-19],在柔性帆板的表面附著輕薄且均勻的壓電致動器,其產(chǎn)生的壓電輸入up作用于柔性帆板,會改變?nèi)嵝詣恿W(xué)方程:
(3)
式中:δ2為耦合矩陣,up將由輸入成形器進行設(shè)計,從而保證加入up后所產(chǎn)生的系統(tǒng)振動響應(yīng)能夠相互抵消,從而達到抑制振動的效果。
(4)
(5)
(6)
其中,R為期望坐標系至本體坐標系的旋轉(zhuǎn)矩陣:
(7)
由式(6)可以看出,若姿態(tài)機動速度過快,則會導(dǎo)致劇烈的柔性振動,進而嚴重影響系統(tǒng)的穩(wěn)定性;但機動速度過慢,則不能滿足任務(wù)需求,因此,姿態(tài)機動存在“快速性”與“穩(wěn)定性”的矛盾。
本文所采用的控制策略如圖1所示,主要包括姿態(tài)機動軌跡設(shè)計、輸入成形器及自適應(yīng)連續(xù)滑模控制器三部分,后續(xù)將進行詳細介紹。
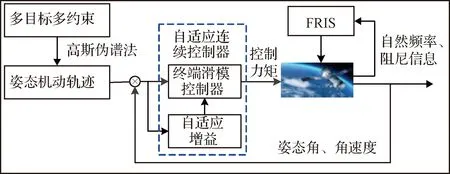
圖1 綜合控制策略設(shè)計框圖Fig.1 Block of integrated control strategy
2 姿態(tài)機動優(yōu)化軌跡設(shè)計
針對姿態(tài)機動過程中快與穩(wěn)的矛盾,本節(jié)通過建立多目標多約束問題,利用高斯偽譜法求解,設(shè)計滿足機動快速性基礎(chǔ)上、最大限度降低柔性振動的姿態(tài)機動軌跡。
2.1 多目標多約束條件建立
衛(wèi)星姿態(tài)機動軌跡優(yōu)化的約束條件主要包括邊值約束及路徑約束,具體描述如下:
邊值約束為衛(wèi)星姿態(tài)機動的初始狀態(tài)和末端狀態(tài),本文設(shè)定的機動任務(wù)為:衛(wèi)星為完成定點拍照任務(wù),需要進行25s/60°姿態(tài)機動,故邊值約束表示為:
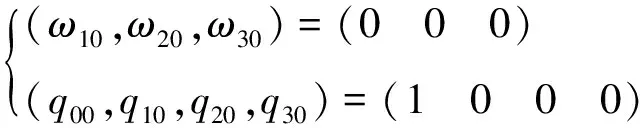
(8)
式中:ωi0,ωif分別為角速度狀態(tài)的初值及終值,qj0,qjf分別為四元數(shù)狀態(tài)初值及終值。
路徑約束為衛(wèi)星姿態(tài)機動過程中需滿足的約束條件,以保證姿態(tài)機動過程能夠滿足任務(wù)要求,且減小柔性振動,具體包括衛(wèi)星角速度、輸出力矩和柔性振動三個約束條件,具體表示為:
1)角速度約束:衛(wèi)星姿態(tài)機動過程中,若衛(wèi)星角速度過大,會導(dǎo)致姿態(tài)傳感器失效,無法準確獲取衛(wèi)星實時姿態(tài),因此需要對角速度進行一定限制(rad/s):
-0.07≤ωi≤0.07(i=1,2,3)
(9)
2)輸出力矩約束:考慮到在軌運行的航天器自身執(zhí)行機構(gòu)物理條件上的限制,在姿態(tài)大角度機動過程中可能會出現(xiàn)超出執(zhí)行能力上限的現(xiàn)象,因此需要建立執(zhí)行機構(gòu)控制輸入約束(Nm):
-10≤ui≤10(i=1,2,3)
(10)
3)柔性振動約束:為避免姿態(tài)大角度機動過程中引起劇烈柔性附件振動,考慮機動穩(wěn)定性目標,確定振動約束,保證航天器不會因為過大的振動而發(fā)生失穩(wěn)現(xiàn)象:
(11)

性能指標:包括機動時間及振動強度在內(nèi)的多優(yōu)化目標。其中,由于本文設(shè)定的任務(wù)為完成25 s/60°的姿態(tài)機動,故機動時間指標固定為25 s;在保證機動快速25 s基礎(chǔ)上,最大限度減小柔性振動,保證系統(tǒng)穩(wěn)定性,故另一個性能指標設(shè)定為:
(12)
2.2 姿態(tài)機動軌跡求解
基于式(8)~(12)建立的多目標多約束條件,需要進行姿態(tài)機動軌跡的優(yōu)化求解。與其他數(shù)值優(yōu)化方法相比,高斯偽譜法求解速度更快、精度更高。因此,本文將利用高斯偽譜法結(jié)合序列二次規(guī)劃方法進行軌跡優(yōu)化,得到兼顧快速性及穩(wěn)定性的姿態(tài)機動軌跡。
Step1:利用高斯偽譜法完成對航天器姿態(tài)機動優(yōu)化模型、性能指標和約束條件的離散化過程,從而將優(yōu)化問題的求解轉(zhuǎn)化為非線性規(guī)劃問題的求解。
Step2:通過成熟的序列二次規(guī)劃算法進行求解,得到期望的姿態(tài)機動軌跡,如圖2所示,由圖中可以看出,航天器可以完成25 s/60°的姿態(tài)機動。
注1. 高斯偽譜法求解速度快,精度高。近幾年來,高斯偽譜法已在實際工程中進行多次應(yīng)用[20-21],用于完成如國際空間站大角度姿態(tài)調(diào)整等多次航天任務(wù),具有十分重要的工程應(yīng)用價值。
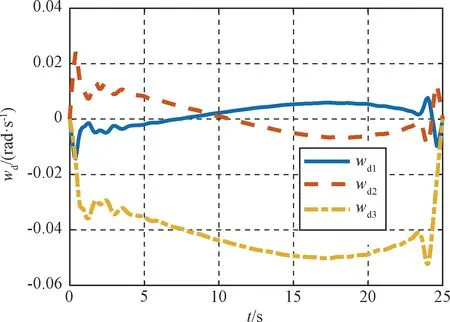
圖2 姿態(tài)角速度機動優(yōu)化軌跡Fig.2 Optimal maneuver trajectory of attitudeangular velocity
3 輸入成形器
本節(jié)設(shè)計新型輸入成形器FRIS,相比傳統(tǒng)輸入成形器,F(xiàn)RIS具有更短的作用時間,且對處理柔性實際頻率變化的魯棒性更強。
ZV輸入成形器為最基本的輸入成形器形式,當外界干擾等作用導(dǎo)致系統(tǒng)實際振動頻率與固有頻率不一致時,會影響ZV的作用效果,因此在ZV基礎(chǔ)上,提出一系列具有魯棒性的輸入成形器形式,如:ZVD,EI等,其中,最常用的ZVD輸入成形器由兩個ZV輸入成形器卷積得到,其數(shù)學(xué)表示形式為:
(13)
為縮短ZVD的作用時間,提出一種新型的輸入成形器形式—FRIS如下:
(14)
(15)
考慮到
(16)
類似可得
(17)
將式(16)~(17)代入式(15)可得
(18)

(19)
由文獻[23]可知,φ通常取為0.05。綜合考慮振動抑制及作用時間的矛盾,選擇ε=0.1,同時保證兩者相對較優(yōu),從而得到FRIS與ZVD的振動抑制效果對比圖,如圖3所示,由此可知FRIS具有更強的魯棒性。此外,由式(13)和式(14)可知,F(xiàn)RIS比ZVD作用時間更短。
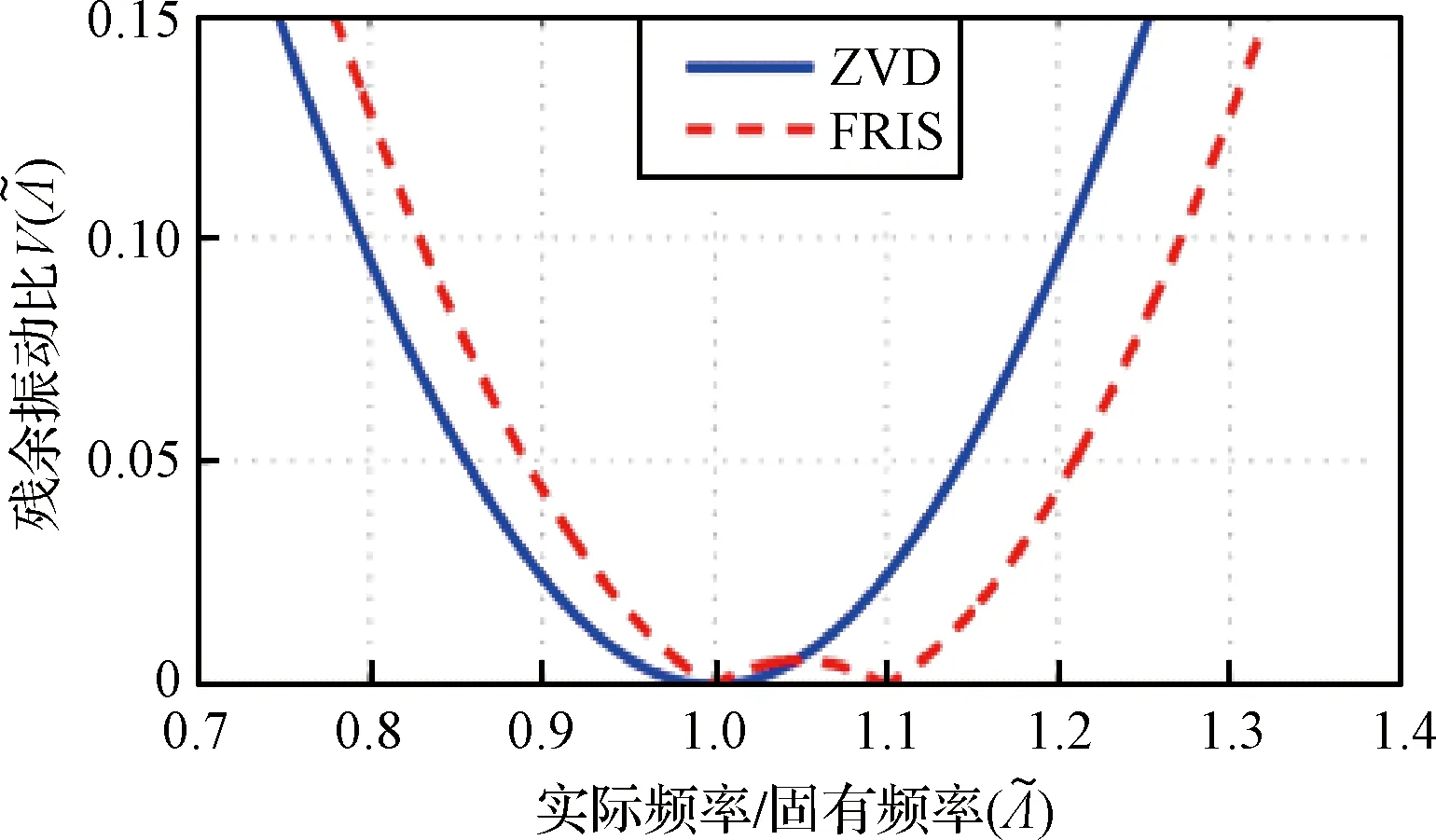
圖3 FRIS及ZVD的抑制效果對比圖Fig.3 Comparison of suppression effects of FRIS and ZVD
考慮柔性動力學(xué)模型式(6),基于獲得的FRIS式(14),設(shè)計壓電致動器電壓輸入:
(20)
通過加入輸入成形器作用,保證姿態(tài)機動過程中產(chǎn)生的柔性振動響應(yīng)能夠互相抵消,從而達到振動抑制的目的。
4 自適應(yīng)連續(xù)終端滑模控制器設(shè)計
基于優(yōu)化獲得的姿態(tài)機動軌跡,考慮輸入成形器對柔性振動抑制后的殘余振動影響,本部分將設(shè)計一種自適應(yīng)連續(xù)終端滑模控制器,有效處理外界干擾及殘余振動對系統(tǒng)的影響,實現(xiàn)對姿態(tài)機動軌跡的高精度快速跟蹤。
設(shè)計如下非奇異終端滑模面:
s=ωe+k1·β(qev)
(21)

(22)

基于式(5)及(21),得到滑模動態(tài)表達式為:

(23)


設(shè)計自適應(yīng)連續(xù)終端滑模控制器:
(24)
式中:k(t)通過如下雙層自適應(yīng)律獲得:

(25)
ρ(t)=r0+r(t)
(26)
(27)

(28)
e(t)=qa1/α-r(t)
(29)

定理1. 針對柔性航天器系統(tǒng)式(4)~(5),若設(shè)計連續(xù)終端滑模控制器式(24),采用如式(25)~(27)所示的自適應(yīng)律,則可保證航天器姿態(tài)四元數(shù)跟蹤誤差qev及角速度跟蹤誤差ωe在有限時間內(nèi)收斂至0。
證. 將式(24)代入式(23)可得:
(30)
令ν=z(t)+D(t),則式(30)轉(zhuǎn)化為:
(31)

Step1: 選取Lyapunov函數(shù)為
(32)
(33)
(34)
因此,基于式(34),根據(jù)文獻[24]中有限時間收斂定義,可得有限時間內(nèi)δ=0,即
(35)
故系統(tǒng)狀態(tài)將在有限時間收斂到滑模面s。
ωe=-k1·β(qev)
(36)
選取Lyapunov函數(shù)為:
(37)
對上式求導(dǎo)可得:
(38)
因此,系統(tǒng)姿態(tài)角跟蹤誤差qev及角速度跟蹤誤差ωe會在有限時間收斂到0。定理1得證。
5 仿真校驗
為校驗軌跡優(yōu)化設(shè)計-輸入成形器-有限時間控制器綜合方法的有效性,進行有無IS情形下的對比仿真校驗與分析,仿真過程中各參數(shù)選取如下:
所受到的干擾設(shè)置為:
d=
航天器姿態(tài)及角速度初值為:
考慮前兩階柔性振動模態(tài),則耦合矩陣δ為:
柔性模態(tài)參數(shù)為:Λ1=0.7681 rad/s,Λ2=1.1038 rad/s,ξ1=0.0056,ξ2=0.0086。
FRIS設(shè)計為:
控制器參數(shù)選取如下:λ=10,r0=1,γ=0.2,q=1.5,α=0.5。
為校驗本文所設(shè)計算法的有效性,對比了無輸入成形器的ACTSMC及有輸入成形器下的ACTSMC(ACTSCM-IS)的作用效果。仿真結(jié)果如圖4~圖7所示。圖4及圖5為姿態(tài)四元數(shù)與姿態(tài)角速度的跟蹤曲線圖,通過圖4及圖5可以看出不加IS時,所設(shè)計的ACTSMC可以實現(xiàn)對系統(tǒng)姿態(tài)的快速跟蹤,但是由于柔性振動未主動抑制仍然存在,控制精度低,而加入IS后可以保證更高精度。
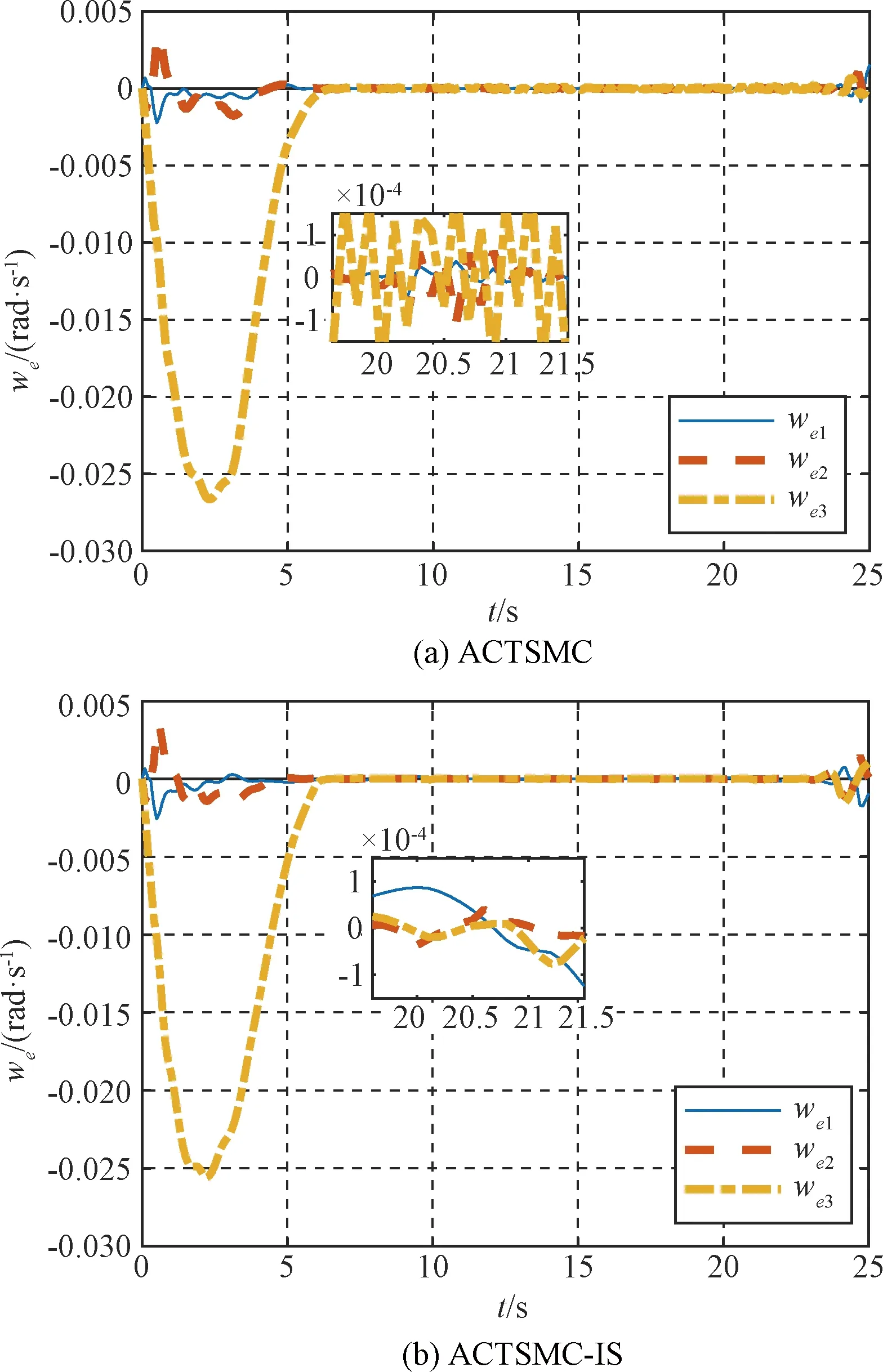
圖5 姿態(tài)角速度跟蹤曲線圖Fig.5 Tracking of attitude angular velocity
圖6為控制輸入變化曲線圖,從圖中可以看出控制輸入滿足約束條件,未加輸入成形器時,柔性振動會對剛體運動產(chǎn)生影響,從而導(dǎo)致控制輸入出現(xiàn)大的波動;而在利用輸入成形器對柔性振動進行有效抑制后,能夠減小了柔性振動對剛體運動的耦合作用,且所設(shè)計的自適應(yīng)算法避免了增益過估計問題,保證控制輸入更光滑,更適合于工程實際。
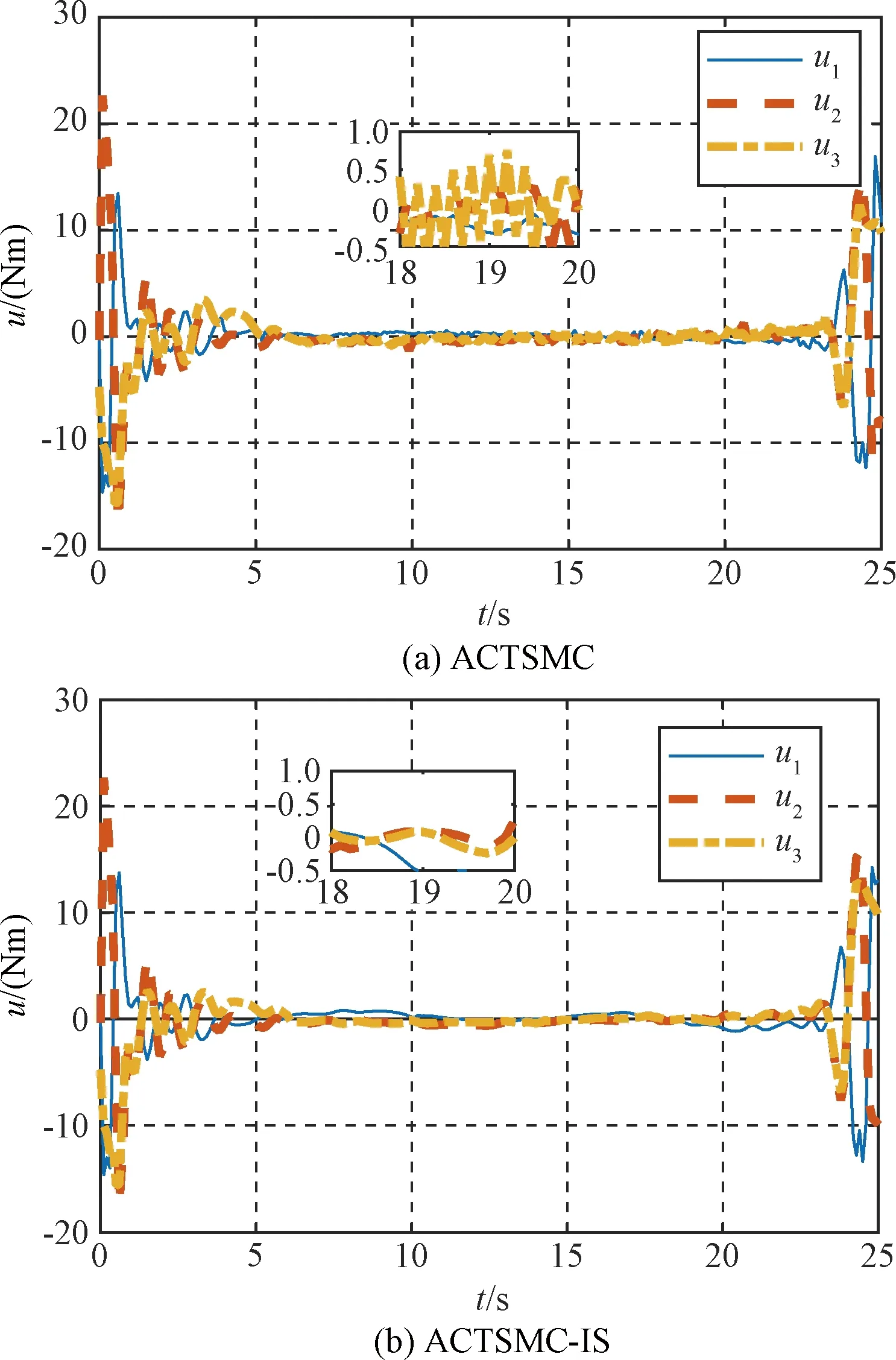
圖6 航天器控制輸入圖Fig.6 Control inputs of spacecraft
考慮到第一階柔性模態(tài)對航天器穩(wěn)定的影響最大,故本文主要考慮利用IS對一階柔性模態(tài)進行抑制,傳統(tǒng)ZVD與FRIS對柔性振動抑制的對比曲線如圖7所示,可以看出FRIS作用時間短,且具有更好的振動抑制效果。因此,通過仿真可以校驗,本文所設(shè)計優(yōu)化控制綜合方法能夠?qū)崿F(xiàn)航天器姿態(tài)高精度、快速機動控制,且有效抑制柔性附件振動。
6 結(jié) 論
對于帶有大型柔性附件的航天器系統(tǒng),考慮到其大角度機動過程中“快速性”及“穩(wěn)定性”矛盾,本文利用優(yōu)化與控制綜合方法,設(shè)計出兼顧快速性及穩(wěn)定性的姿態(tài)機動軌跡,并提出一種既能減小作用時間、又能提高魯棒性的新型輸入成形器,結(jié)合雙層自適應(yīng)連續(xù)終端滑模控制器,可以保證柔性振動的主動抑制,實現(xiàn)對姿態(tài)優(yōu)化軌跡的快速高精度跟蹤。文中給出的仿真實例說明了該方法的有效性。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16