空間在軌環(huán)境下的30 cm離子推力器三柵極組件間距變化仿真分析
2019-12-03 02:35:16孫明明
宇航學(xué)報 2019年11期
孫明明,耿 海,王 亮,鄭 藝
(蘭州空間技術(shù)物理研究所真空技術(shù)與物理重點實驗室,蘭州 730000)
0 引 言
離子推力器是廣泛應(yīng)用于航天器在軌位置調(diào)節(jié)及軌道保持的一種靜電加速式電推力器[1]。我國目前最新研制的大口徑、高功率且具有多種工作模式(3 kW和5 kW兩種功率模式)的離子推力器為蘭州空間技術(shù)物理研究所研制的30 cm口徑電推力器,該推力器采用環(huán)形永磁體磁場構(gòu)型,并且為降低CEX(電荷交換離子)對加速柵的刻蝕影響,在傳統(tǒng)的雙柵系統(tǒng)(屏柵和加速柵)基礎(chǔ)上,增加減速柵構(gòu)成了三柵系統(tǒng),以降低加速柵的離子刻蝕并提升其壽命。柵極組件是離子推力器束流加速及引出的關(guān)鍵部件,同時也是推力器獲得高比沖和實現(xiàn)長壽命的制約。
為保證30 cm離子推力器三柵極組件的導(dǎo)流系數(shù)、束流發(fā)散角等工作參數(shù),需通過初始裝配以控制各柵極間留有一定間隙(即冷態(tài)間距)。在推力器工作過程中,隨著溫度的變化,柵極組件在熱應(yīng)力作用下發(fā)生熱變形,導(dǎo)致此時的(熱態(tài))柵極間距與冷態(tài)間距明顯不同。柵極間距過小會引起柵間打火頻繁、啟動困難等故障,而間距拉大會導(dǎo)致柵極刻蝕嚴(yán)重、推力器壽命縮短等可靠性問題。以美國NSTAR離子推力器30000 h壽命試驗為例[2],在試驗完成首輪2000 h后,開倉檢測發(fā)現(xiàn)屏柵腐蝕嚴(yán)重,在縮小屏柵和加速柵間距,試驗繼續(xù)進(jìn)行1000 h后,屏柵腐蝕基本已消除,證明柵間距變化對柵極刻蝕具有顯著影響。Soulas等[3]在NSTAR離子推力器的柵極間距測量過程中發(fā)現(xiàn),當(dāng)屏柵和加速柵間距縮小至0.2 mm以下時,柵間的打火現(xiàn)象將頻繁發(fā)生且推力器無法完成正常工作啟動。Noord等[4]在NEXT離子推力器壽命試驗過程中發(fā)現(xiàn),在6.9 kW高功率模式下,由于溫度變化引起的柵極間距異常縮小,導(dǎo)致加速柵在半徑15.3 cm以外,下游區(qū)域柵孔存在大量六角星形腐蝕。Sengupta等[5]認(rèn)為影響柵極離子刻蝕速率的主要原因為,熱態(tài)柵極間距變化導(dǎo)致的離子束流聚焦特性以及柵孔對中性變化。Brophy等[6]在NSTAR離子推力器的改進(jìn)過程中發(fā)現(xiàn),柵極冷態(tài)間距僅調(diào)整4%,屏柵和加速柵孔徑的刻蝕速率相比原刻蝕速率分別提高2%和9%。Goebel等[7]認(rèn)為由于熱膨脹效應(yīng)造成的屏柵和加速柵間距變化,影響了束流加速區(qū)等離子體的運動軌跡,并直接造成柵極導(dǎo)流系數(shù)的改變。由于屏柵和加速柵均為邊緣約束且?guī)Ч案呓Y(jié)構(gòu),因此二者的熱變形方向均為沿柵面法向并向外凸起。本課題組在前期研究中[8],通過試驗發(fā)現(xiàn),當(dāng)30 cm離子推力器柵間距小于0.25 mm時,柵間打火現(xiàn)象將頻繁發(fā)生,因此0.25 mm可作為推力器正常啟動的最小柵極間距要求。目前國內(nèi)對于工作時柵間距變化的動態(tài)過程研究尚處于起步階段,在沒有獲得柵極熱態(tài)間距的條件下,針對離子推力器束流引出以及柵極刻蝕的模擬,典型做法是將柵極冷態(tài)間距作為仿真模型的固定邊界[9],但模擬結(jié)果將與實際情況存在較大差距。由于離子推力器在軌工作過程中,會受到各種復(fù)雜空間環(huán)境影響,如深空冷背景、太陽輻照影響,因此空間環(huán)境下的柵極間距變化程度遠(yuǎn)大于地面環(huán)境,且在軌無法進(jìn)行柵極間距測量,只能通過仿真分析獲得空間環(huán)境下的柵極間距變化。
本文采用有限元模擬與地面試驗驗證相結(jié)合的方法,首先對地面環(huán)境溫度下的推力器三柵極熱平衡溫度進(jìn)行仿真及校驗。在模型經(jīng)校驗認(rèn)為準(zhǔn)確的基礎(chǔ)上,考慮到5 kW功率模式下的柵極工作前后的溫差更高,熱形變位移最大,因此主要計算模擬空間環(huán)境下,推力器5 kW模式下啟動全過程中的柵極熱形變位移,并根據(jù)仿真結(jié)果對啟動過程的柵極打火風(fēng)險進(jìn)行評估。
1 柵極熱模型
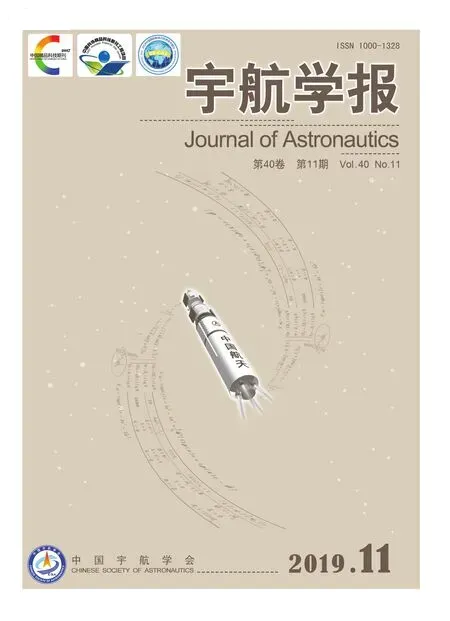
由于不同背景環(huán)境下的初始溫度以及工作溫度會造成柵極熱態(tài)間距各不相同,因此獲取工作階段的溫度變化曲線是計算柵極熱態(tài)間距的前提。本文結(jié)合前期建立起的離子推力器能量沉積模型[10],獲得柵極熱分析邊界條件,并采用有限元法模擬不同環(huán)境下的柵極溫度變化曲線。由于柵極組件結(jié)構(gòu)的復(fù)雜性,為確保仿真計算順利進(jìn)行,首先需對柵極結(jié)構(gòu)進(jìn)行簡化處理,即刪除柵極原有多孔特征,進(jìn)行均勻化處理,但保留1:1拱高高度不變,簡化后的柵極結(jié)構(gòu)如圖1(a)所示。其次對影響網(wǎng)格劃分的表面凸起、硬邊以及帶缺陷圓孔等,均采用布爾操作進(jìn)行修復(fù)或填補,對于約束部件(主要是標(biāo)準(zhǔn)件),在不改變約束面的基礎(chǔ)上,進(jìn)行簡化處理,使得約束條件與真實情況基本一致,如圖1(b)所示。最后,為了與地面熱平衡試驗結(jié)果進(jìn)行對比,根據(jù)試驗的真實情況,即推力器通過安裝架固定至支撐板上,支撐板與熱沉焊接,由此建立起熱沉模型,如圖1(c)所示,熱沉大小以及位置均按實際尺寸建模。劃分網(wǎng)格后的推力器模型如圖1(d)所示。
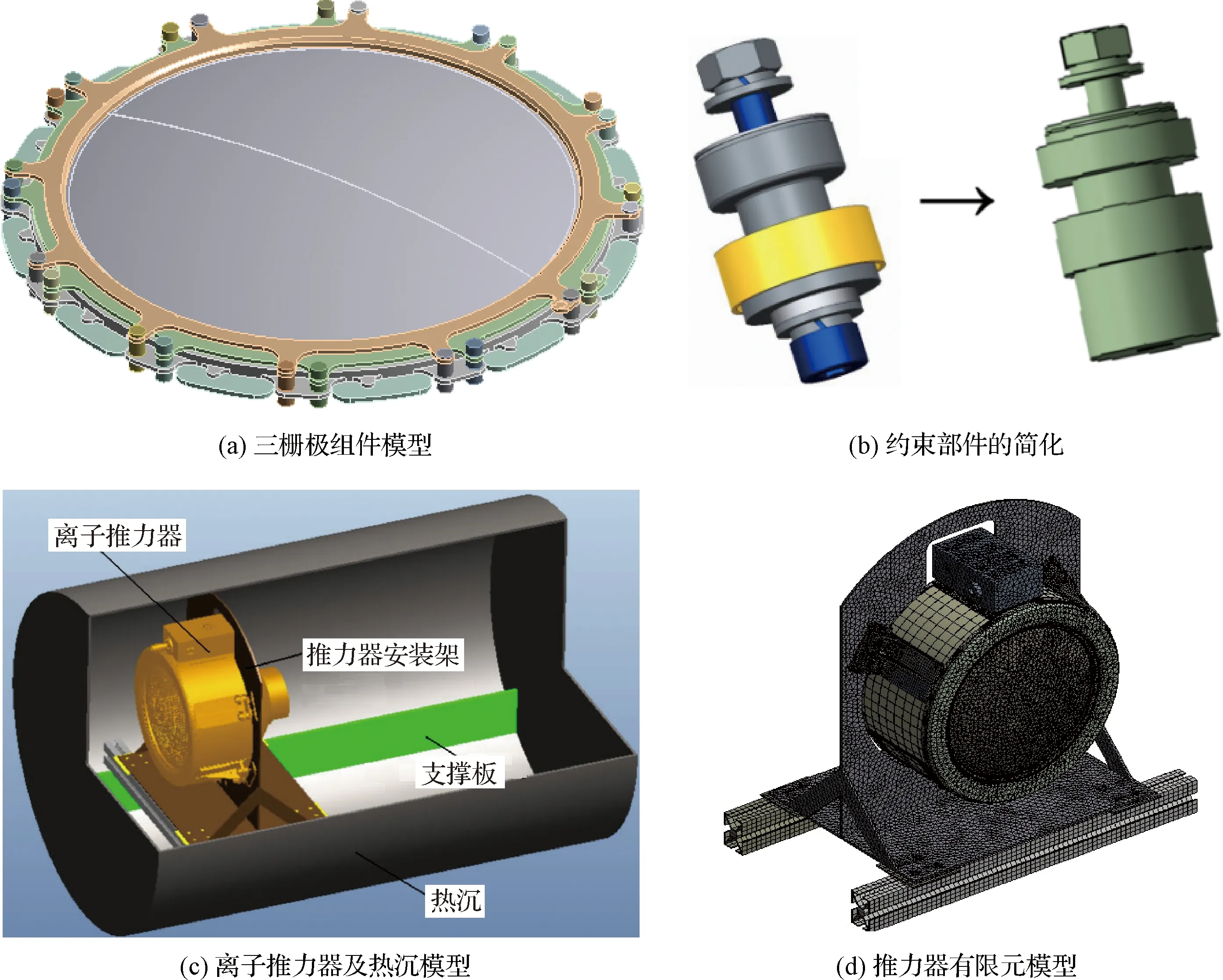
圖1 三柵極組件及離子推力器分析模型Fig.1 Analysis model of the triple grid assembly and ion thruster
推力器在軌工作時,在其4個T型安裝板上均焊接有主動加熱裝置(即主動熱控),如圖2(a)所示,主動熱控可以提供60 W至90 W的加熱功率,實現(xiàn)溫控點在20 ℃至50 ℃溫度范圍內(nèi)恒溫,以保證推力器在空間低溫環(huán)境下能夠正常工作,圖2(a)所示的溫控點則用于評估主動熱控的升溫效果。最后對于輻射面設(shè)置,根據(jù)圖1(c)所示地面真空設(shè)備內(nèi)的推力器實際輻射關(guān)系,分別設(shè)置屏柵外表面-加速柵內(nèi)表面、加速柵外表面-減速柵內(nèi)表面、減速柵外表面-熱沉內(nèi)表面、陽極筒外表面-外殼內(nèi)表面、外殼外表面-熱沉內(nèi)表面以及安裝架-熱沉內(nèi)表面,共計6個輻射面對。熱沉內(nèi)表面的發(fā)射率和吸收率均按實測值設(shè)置,并且熱沉內(nèi)表面的熱邊界根據(jù)試驗測量值設(shè)置為恒溫邊界(試驗過程中熱沉溫度基本無波動)。模擬在軌工況時,則取消熱沉部件,推力器處于開放空間,直接向空間輻射熱量,如圖2(b)所示,但需考慮衛(wèi)星表面與推力器外殼間的輻射熱交換。
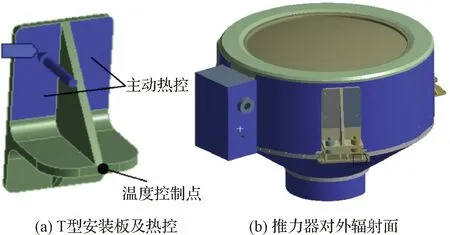
圖2 T型安裝板及30 cm離子推力器對外輻射面Fig.2 T-type mounting plate and external radiant surface of30 cm ion thruster
推力器部分部件表面進(jìn)行了陽極氧化處理,根據(jù)實測結(jié)果,設(shè)置陽極筒外表面、外殼內(nèi)、外表面的發(fā)射系數(shù)均為0.8。對于柵極(采用Mo材料)的表面發(fā)射系數(shù),不同的表面氧化狀況(未氧化、輕微氧化、嚴(yán)重氧化)會使Mo材料表面的發(fā)射率在0.3至0.8之間變化[11],本文取柵極的表面發(fā)射系數(shù)為0.5,并根據(jù)實際的三柵極不同的開孔率進(jìn)行等效。
其次,由于柵極結(jié)構(gòu)已經(jīng)進(jìn)行了均勻化處理,因此需對柵極結(jié)構(gòu)屬性進(jìn)行等效,根據(jù)前期研究結(jié)果[12],將柵極原有多孔結(jié)構(gòu)處理為保持拱高不變且無孔結(jié)構(gòu)后,可得到等效后的柵極組件材料力學(xué)特性。對于材料的熱導(dǎo)率、熱膨脹系數(shù)等參數(shù)均根據(jù)相關(guān)資料或試驗數(shù)據(jù)設(shè)置,并且對于有限元模型中的所有標(biāo)準(zhǔn)件材料及其熱力學(xué)屬性均統(tǒng)一設(shè)置為氧化鋁95瓷。對于力學(xué)約束邊界,由于柵極組件與推力器本體通過螺釘進(jìn)行固定裝配,因此將所有裝配螺釘均設(shè)置為固定約束。柵極溫度場分布及熱形變計算采用ANSYS軟件進(jìn)行,并將柵極溫度隨時間變化結(jié)果作為熱形變位移仿真的輸入條件。由于柵極模型近似為圓盤形且邊緣均為螺釘固定約束,根據(jù)推力器的工作特點,中心區(qū)域束流密度最高而邊緣最低,因此柵極的中心溫度最高且沿徑向逐漸降低,柵極熱形變方向則均為沿柵面法向(模擬時默認(rèn)為Z方向)并向外凸起[13]。
2 模型校驗
為驗證上述邊界條件設(shè)置以及模型計算結(jié)果的準(zhǔn)確性,本文以地面開展的離子推力器極限降溫工況和30 W熱控干預(yù)工況的試驗結(jié)果來進(jìn)行模型校驗。試驗在蘭州空間技術(shù)物理研究所的TS- 6C設(shè)備中開展,其中極限降溫工況是指當(dāng)熱沉溫度穩(wěn)定為-140 ℃,推力器不點火且無熱控,從室溫條件(25 ℃)降溫至溫度平衡(1 h內(nèi)的溫度變化率≤1 ℃)。試驗結(jié)果顯示,溫控點達(dá)到溫度平衡的時長為1115 min,軟件模擬時長約為1000 min,各測溫點平衡溫度的仿真結(jié)果如表1所示。30 W熱控干預(yù)工況是指當(dāng)熱沉溫度穩(wěn)定為-140 ℃,推力器不點火,主動熱控加熱功率恒定為30 W。該工況下,試驗測量達(dá)到溫度平衡的時間總長為1427 min,軟件模擬時長約為1200 min,各測溫點平衡溫度的仿真結(jié)果如表2所示。
表1 極限降溫工況下的試驗結(jié)果及仿真結(jié)果(單位:℃)Table 1 Test results and simulation results under coolingcondition (units: ℃)
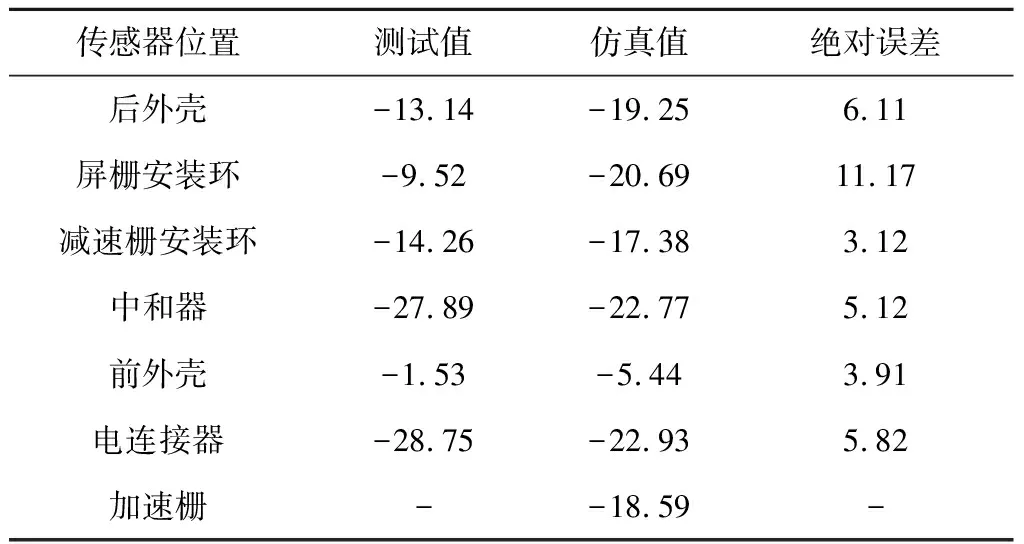
表2 30 W熱控加熱工況下的試驗結(jié)果及仿真結(jié)果(單位:℃)Table 2 Test results and simulation results under 30 W heatcondition (units: ℃)
從表1和表2所示極限降溫工況和30 W熱控干預(yù)工況的比對結(jié)果來看,由于仿真過程忽略了推力器不同部件間的接觸熱阻,因此兩種工況下,柵極溫度平衡時長的仿真結(jié)果均低于試驗結(jié)果。仿真分析與試驗結(jié)果的比對誤差較小且在15 ℃以內(nèi)。兩種工況的誤差最大處均為屏柵支撐環(huán),原因經(jīng)分析認(rèn)為,由于在仿真過程中,屏柵支撐環(huán)與推力器本體的連接標(biāo)準(zhǔn)件全部設(shè)置為95瓷材料,推力器本體對柵極的熱傳導(dǎo)通過陶瓷導(dǎo)熱,而實際情況是仍有部分熱量通過金屬螺釘進(jìn)行傳導(dǎo),因此無熱源時,屏柵支撐環(huán)降溫慢,而有熱源時,屏柵支撐環(huán)升溫慢,導(dǎo)致出現(xiàn)表1和表2所示結(jié)果,但鑒于整體誤差較小,因此認(rèn)為熱模型具有較好的準(zhǔn)確度和可信度。
3 空間環(huán)境下的柵極間距仿真
推力器在軌工作時,空間環(huán)境溫度對柵極間距具有較大影響,根據(jù)前期研究結(jié)論[12],柵極從初始溫度T0到平衡溫度T1的溫差ΔT對熱形變的影響占主導(dǎo)地位。其次由于Mo材料的再結(jié)晶溫度最低為800 ℃[14],即柵極溫度至少需高于該溫度,柵極才會發(fā)生塑性變形,而前期試驗結(jié)果表明,柵極平衡溫度最高不會超過500 ℃[12],因此在推力器工作過程中,柵極組件應(yīng)處于線性變形階段,即熱應(yīng)力σ與溫差ΔT存在線性關(guān)系,而主動熱控可改變柵極初始溫度T0,從而實現(xiàn)通過減少ΔT,達(dá)到降低σ的目的。本文設(shè)置了3種空間環(huán)境工況,分別為空間極限低溫、空間背景影響以及主動熱控干預(yù),并針對這3種工況分別進(jìn)行了推力器點火啟動全過程的柵極間距變化模擬。對于推力器點火啟動的熱流邊界,根據(jù)前期建立起的離子推力器能量沉積模型[10],造成推力器溫度升高的能量來源主要是各種能量粒子(如一價、二價Xe離子以及原初、二次電子)在放電室和柵極表面的能量交換以及放電室等離子體的激發(fā)輻射過程。其中粒子沉積能量可根據(jù)粒子沉積電流和電勢給出,而激發(fā)輻射能量則根據(jù)等離子體的總激發(fā)能以及不同部件的等效面積得到。由于分析對象為三柵極結(jié)構(gòu),從前期試驗結(jié)果來看,在5 kW和3 kW工作模式下,減速柵的截獲電流均非常小,且等離子體的能量輻射受到屏柵和加速柵的阻擋效應(yīng),因此對減速柵未設(shè)置沉積能量。通過能量沉積模型計算得到,在5 kW工作模式的額定電氣參數(shù)下,屏柵的等效面熱流為2116.8 W/m2,加速柵為312.2 W/m2。
3.1 空間極限低溫工況
此工況下,空間環(huán)境溫度為-269 ℃(4 K環(huán)境),主動熱控關(guān)閉(模擬熱控發(fā)生故障),忽略太陽輻照效應(yīng)(處于太陽陰影區(qū)),推力器從該溫度下以5 kW工作模式點火啟動。得到該工況下屏柵和加速柵中心區(qū)域的溫度變化曲線如圖3所示,限于篇幅,未給出減速柵溫度變化曲線。
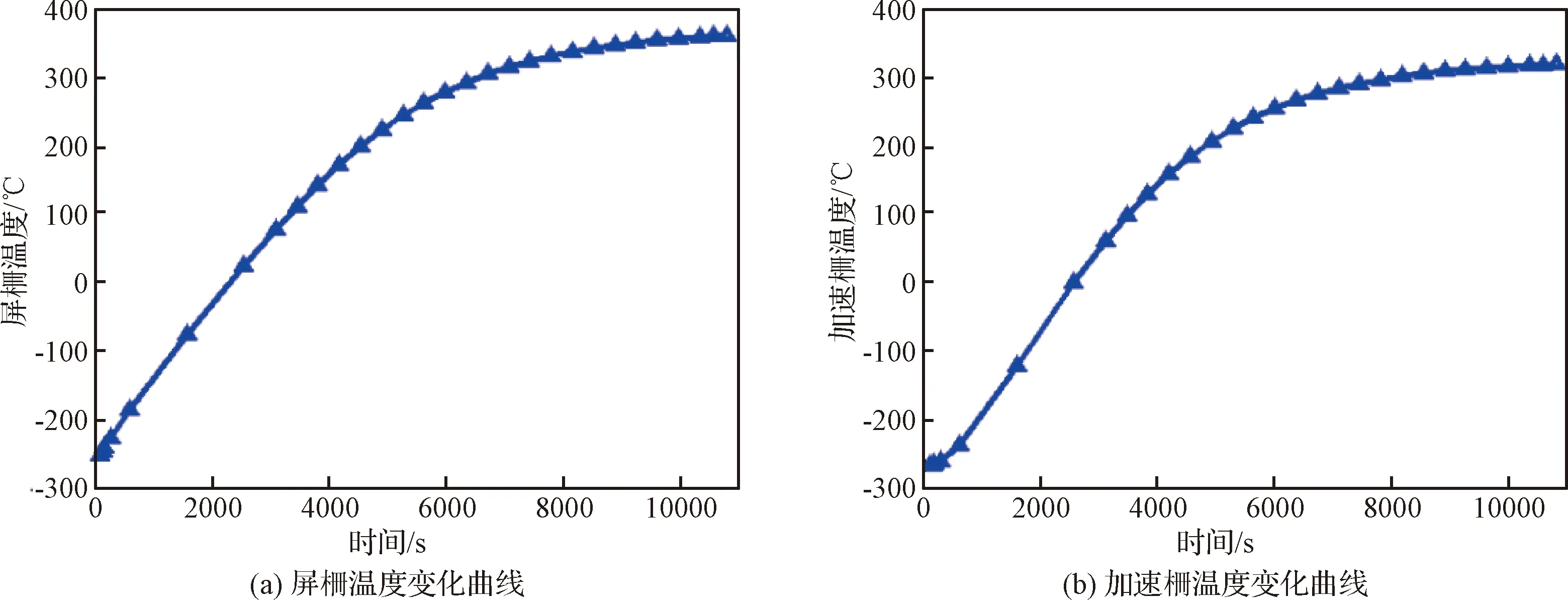
圖3 -269 ℃空間環(huán)境下的柵極溫度變化曲線Fig.3 Temperature change curve of the grids under -269 ℃ space environment
從圖3所示結(jié)果來看,當(dāng)推力器從-269 ℃的初始溫度啟動,屏柵約在10000 s后才能達(dá)到溫度平衡,平衡后的中心區(qū)域溫度為385 ℃,而加速柵約在8000 s后即達(dá)到溫度平衡,平衡后的中心區(qū)域溫度為320 ℃左右,二者溫差達(dá)到65 ℃。原因經(jīng)分析認(rèn)為,加速柵的溫度升高主要是在屏柵升溫后對其產(chǎn)生熱輻射效應(yīng)引起,屬于被動升溫,而屏柵則直接受到放電室等離子體輻射作用,因此屏柵溫度最高,加速柵次之,減速柵溫度則最低。由于屏柵開孔率最高且厚度最小(0.4 mm),導(dǎo)致屏柵熱容最低[15-16],在溫度升高以及邊緣均被約束的情況下,屏柵中心的Z方向(即柵面法向方向)變形量最大,加速柵次之,減速柵中心變形最小,因此會出現(xiàn)屏柵與加速柵、加速柵與減速柵的相對間距均縮小的現(xiàn)象[17]。
從仿真分析結(jié)果來看,也驗證了上述結(jié)論。三個柵極熱形變達(dá)到穩(wěn)定的時間約在推力器啟動后8000 s,其中屏柵中心的Z方向熱變形為2.48 mm,加速柵為1.67 mm,二者差值為0.81 mm,而屏柵和加速柵初始間距為0.85 mm至0.95 mm,因此二者在熱平衡下的最大柵間距為0.14 mm。減速柵熱變形為0.88 mm,加速柵和減速柵初始間距為0.75 mm至0.85 mm,因此在-269 ℃的初始溫度下,推力器工作溫度平衡后,加速柵和減速柵最大間距為0.06 mm,二者幾乎發(fā)生貼合,推力器將無法實現(xiàn)正常工作。
本工況是推力器處于空間冷背景環(huán)境,在無主動熱控及太陽輻照的影響下啟動的一種極端情況。從該工況的分析結(jié)果來看,由于柵極溫度從初始達(dá)到平衡后,存在極高的溫度差ΔT,會導(dǎo)致推力器在啟動后不久,柵極隨著溫差變大導(dǎo)致間距過小,甚至存在貼合現(xiàn)象。
3.2 空間背景影響工況
上述工況是一種極端情況,而實際上,當(dāng)推力器在軌運行時,會受到不同程度的太陽輻照、衛(wèi)星帆板恒溫或者是地球紅外返照影響,因此柵極的初始啟動溫度要遠(yuǎn)高于-269 ℃的極限溫度。本課題組通過聯(lián)合航天五院通信衛(wèi)星事業(yè)部,對空間背景影響工況下的柵極啟動溫度進(jìn)行了仿真,得到屏柵的初始溫度為-66 ℃,加速柵和減速柵分別為-69 ℃和-102 ℃,運算過程本文不再給出。
采用與前述同樣的仿真分析方法,計算得到推力器達(dá)到熱平衡后,屏柵、加速柵和減速柵中心區(qū)域Z方向的最大熱變形分別為2.36 mm、1.63 mm和0.91 mm。根據(jù)三個柵極的初始相對間距,得到屏柵和加速柵熱平衡下的最大間距為0.22 mm,加速柵和減速柵最大間距為0.13 mm。由此可見,即使是受到在軌空間背景影響,柵極初始溫度有大幅提高,但推力器仍無法實現(xiàn)正常工作。
3.3 主動熱控干預(yù)工況
從上述兩種工況的分析結(jié)果來看,熱平衡下的柵極間距均遠(yuǎn)低于安全間距,因此在軌工作時,須增加主動熱控來提高柵極啟動初始溫度,從而降低柵極達(dá)到熱平衡后的溫度差,以確保柵極間距在安全范圍內(nèi)。
根據(jù)推力器的實際工作流程,5 kW功率下的啟動過程被分為了6個不同階段,分別包括4個檔位的束流調(diào)節(jié)、束流閉環(huán)以及額定束流調(diào)節(jié),根據(jù)不同啟動階段的電、氣參數(shù),結(jié)合推力器能量沉積模型,可計算得到不同階段的熱流邊界,如表3所示。
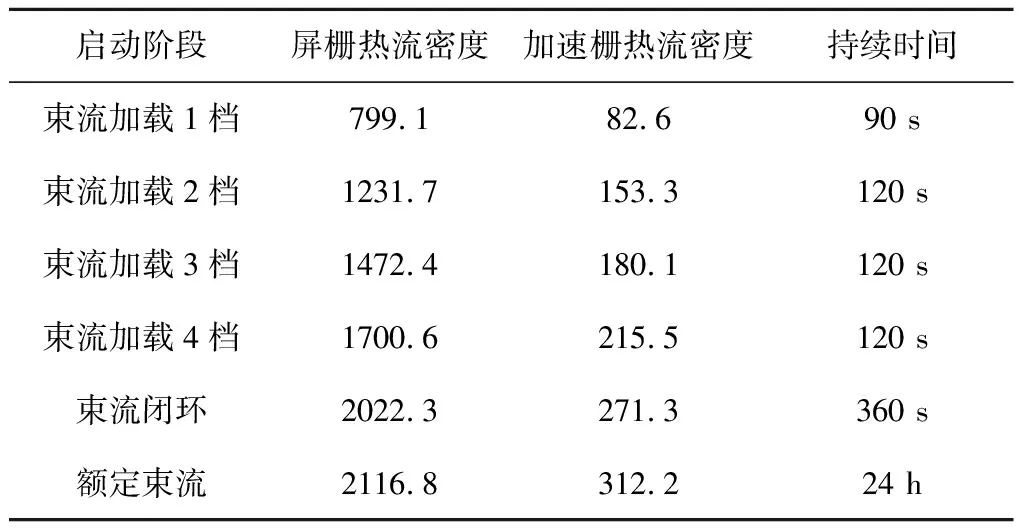
表3 推力器不同啟動階段的熱流加載條件(單位:Wm-2)Table 3 Surface heat flux in different start-up step(units: Wm-2)
根據(jù)上述空間背景影響工況下的柵極啟動溫度,并考慮主動熱控工作,設(shè)置溫控點溫度為20 ℃(熱控的最低溫度),計算得到屏柵、加速柵和減速柵的初始啟動溫度T0分別約為-6 ℃、-18 ℃和-25 ℃。在此基礎(chǔ)上,根據(jù)表3給出的邊界條件計算柵極溫度變化曲線,并完成熱形變位移分析。早期試驗結(jié)果顯示,推力器一般在3 h后溫度能夠達(dá)到平衡[12],因此仿真時長同樣設(shè)置為3 h(10800 s)。圖4(a)所示結(jié)果為10800 s內(nèi)的柵極熱形變位移變化,為了重點研究啟動階段內(nèi)的柵極間距變化,本文給出了1000 s時長內(nèi)(從束流1檔一直到束流閉環(huán))的三個柵極的相對熱形變位移變化曲線,如圖4(b)所示。根據(jù)圖4所示結(jié)果,可得到推力器工作3 h內(nèi)的實際柵極間距,如表4所示,表中給出的計算值均為最小間距,即取屏柵與加速柵、加速柵與減速柵的冷態(tài)間距分別為0.85 mm和0.75 mm。

圖4 在20 ℃主動熱控條件下的推力器不同啟動階段的柵極熱形變位移Fig.4 Thermal deformation of the grids in start-up process under 20 ℃ control temperature
根據(jù)表4所示結(jié)果來看,在啟動后約450 s左右,屏柵與加速柵間距已降低至0.25 mm以下,但此時加速柵與減速柵的間距幾乎無變化。當(dāng)推力器達(dá)到束流閉環(huán)時(810 s),屏柵和加速柵間距逐漸增大,而加速柵和減速柵間距則持續(xù)降低。在引束流約8000 s后,柵極間距達(dá)到穩(wěn)定值,此時柵極的溫度也已基本穩(wěn)定。造成圖4和表4所示結(jié)果的原因經(jīng)分析認(rèn)為,主要是三個柵極的不同溫度變化過程所決定。屏柵受熱最快,加速柵次之,減速柵由于受到遮擋效應(yīng)溫升最慢,從圖4(a)曲線來看,前400 s內(nèi)加速柵和減速柵幾乎還未發(fā)生熱變形,而屏柵中心Z方向已發(fā)生約0.5 mm的變形。在400 s以后,加速柵溫升起來,加速柵的形變量高于屏柵和減速柵,從而導(dǎo)致圖4(b)出現(xiàn)屏柵與加速柵間距增大,而加速柵和減速柵間距縮小的現(xiàn)象。在推力器工作8000 s后,柵極間距已基本固定,屏柵與加速柵,加速柵與減速柵的間距分別為0.25 mm和0.2 mm。
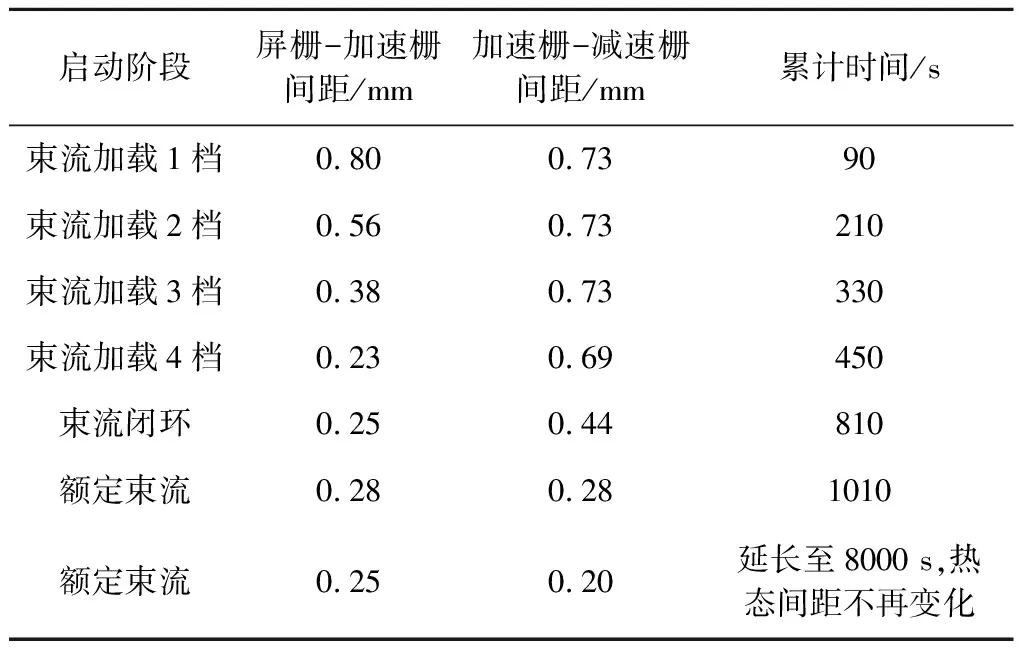
表4 在20 ℃主動熱控下的不同啟動階段的柵極組件熱態(tài)間距值Table 4 Hot gap change in different start-up step under 20 ℃control temperature
本文通過計算,得到當(dāng)主動熱控提供溫控點恒溫為30 ℃時,在推力器全啟動過程且達(dá)到溫度平衡的情況下,屏柵和加速柵的最小間距為0.27 mm,而加速柵和減速柵最小間距為0.22 mm。當(dāng)主動熱控提供溫控點恒溫為40 ℃時,推力器達(dá)到溫度平衡后,屏柵和加速柵、加速柵和減速柵的最小間距分別為0.28 mm和0.24 mm。因此當(dāng)主動熱控恒溫為30 ℃和40 ℃時,仍不能滿足0.25 mm的柵極安全間距要求。當(dāng)主動熱控將溫控點恒溫至50 ℃時,仿真得到10800 s內(nèi)的柵極熱形變位移變化,以及在1000 s時長內(nèi),不同啟動階段的三柵極熱形變位移變化過程,分別如圖5(a)和圖5(b)所示。表5所示為離子推力器全啟動過程中,從束流1檔一直到束流閉環(huán)內(nèi)的柵極間距變化,從結(jié)果來看,推力器啟動后約9000 s左右,柵極間距不再發(fā)生變化,且平衡后的三個柵極的兩兩間距均能夠滿足0.25 mm的安全間距要求。
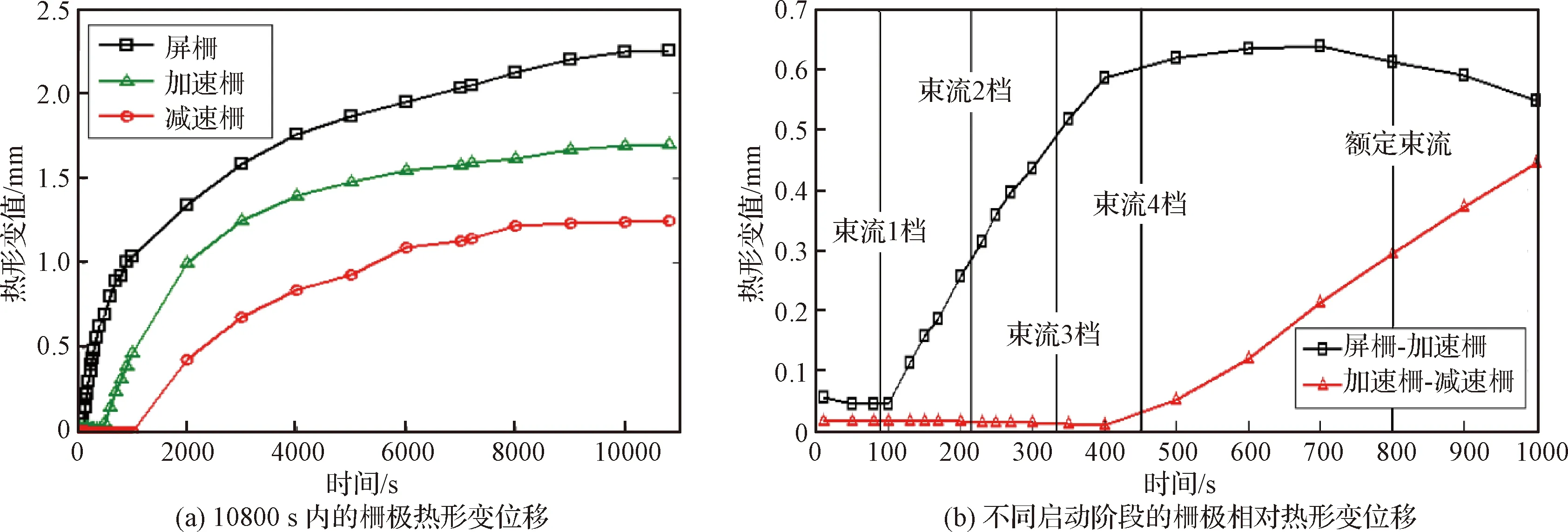
圖5 在50 ℃主動熱控條件下的推力器不同啟動階段的柵極熱形變位移Fig.5 Thermal deformation of the grids in start-up process under 50 ℃ control temperature
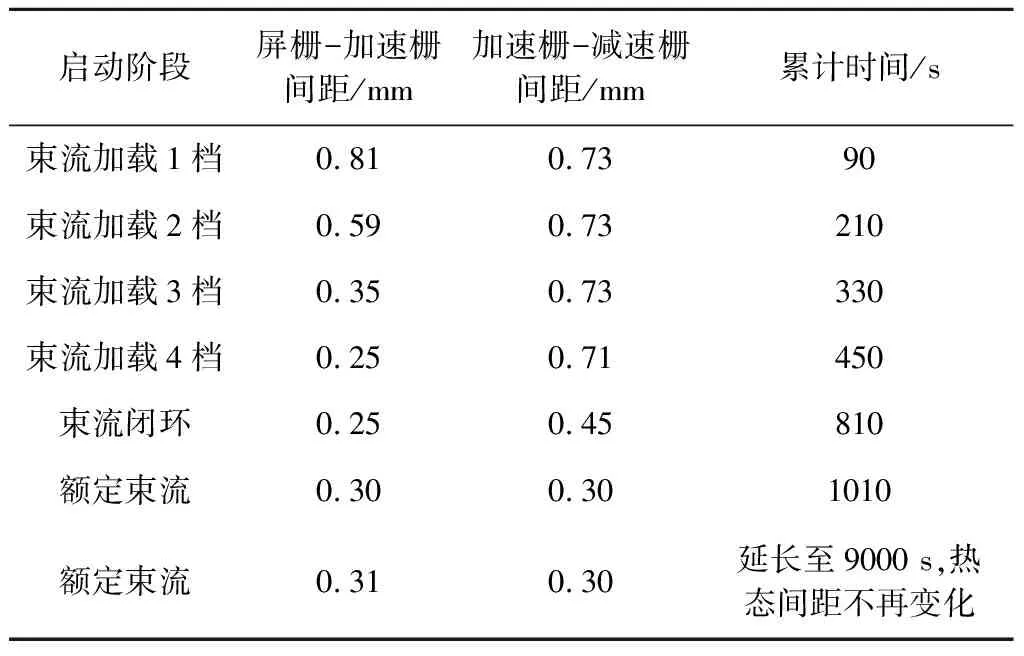
表5 在50 ℃主動熱控下的不同啟動階段的柵極組件熱態(tài)間距值Table 5 Hot gap change in different start-up step under 50 ℃control temperature
4 結(jié) 論
從本文給出的3種在軌工況分析結(jié)果來看,30 cm離子推力器在-269 ℃深空冷背景以及空間背景影響條件下,均無法實現(xiàn)正常啟動,而只能借助主動熱控干預(yù)。5 kW工作模式下,主動熱控提供溫控點分別恒溫為20 ℃、30 ℃和40 ℃時,推力器溫度達(dá)到穩(wěn)定后,柵極間距無法滿足安全間距要求。當(dāng)主動熱控提供溫控點恒溫為50 ℃時,推力器工作穩(wěn)定后的屏柵和加速柵、加速柵和減速柵的最小間距分別為0.31 mm和0.30 mm,可滿足柵極安全間距要求。
在目前地面環(huán)境尚無法創(chuàng)造在軌工況環(huán)境,且仿真計算結(jié)果無法驗證的條件下,本文的分析結(jié)果均為最惡劣情況,柵極間距仿真結(jié)果均為最小值,而實際在軌運行時,柵極間距應(yīng)大于本文分析結(jié)果,計算結(jié)果保留了一定余量。分析結(jié)果證明,主動熱控干預(yù)能夠提供給推力器柵極組件更高的啟動溫度,從而有效降低柵極達(dá)到溫度平衡后的溫差,降低柵極熱形變帶來的危害。對于30 cm離子推力器實際在軌應(yīng)用時,可調(diào)整熱控加熱功率,使溫控點溫度保持在50 ℃左右,能夠最大程度地提高推力器工作可靠性。