清煤挖掘機的設計與運動學分析
2019-12-13 03:44:36張道秋劉豐瑞
冶金設備 2019年5期
關鍵詞:設計
張道秋 樊 磊 劉豐瑞
(山東帝盟重工機械有限公司 山東德州 251210)
1 前言
隨著我國經濟的快速發展,國內工程機械的應用范圍越來越廣。在內蒙古等嚴寒地區,冬天最低溫度能達到零下40℃,煤炭公司卸煤后煤炭會在火車廂內壁凍結,凍結厚度為200mm至300mm,翻車機將運煤車翻轉后四周凍煤均不會脫落,必須將車廂開出去后由挖掘機清理,費時費力,清理完后還需長距離開回原地進行卸煤作業,工作效率低[1]。因此,需要設計能夠在現場進行清煤作業的清煤挖掘機,以提高作業效率。
2 清煤挖掘機原理
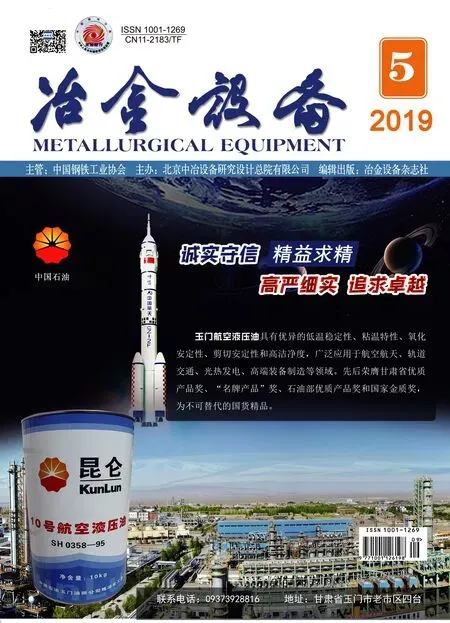
清煤挖掘機由底盤上的同步電機驅動實現在軌道上的移動,通過回轉支撐與回轉減速機連接實現上部平臺的回轉。工作裝置由支撐臂、伸縮臂、斗桿、鏟斗以及對應控制油缸組成,通過調整液壓油缸實現單獨或復合動作。如圖1所示為清煤挖掘機的結構示意圖。工作時,翻車機調整火車廂的角度,清煤挖掘機在同步電機驅動下從停放位置運行至工作位置,調整支撐臂、伸縮臂、斗桿、鏟斗的對應油缸到達工作初始位置,調整各油缸開始清理動作。清理順序為火車廂側面、地面、另一側面,由移動清煤挖掘機在軌道上的位置完成清理順序,直至完成整節車廂的清理工作。
3 清煤挖掘機的設計
3.1 底盤設計
清煤挖掘機是在固定軌道上移動的,因此選用現有火車導軌,經差齒后設計成專用齒條,固定在地面基礎之上作為清煤挖掘機的行走軌道。底架中部兩側安裝兩臺同步電機,并裝備專用減速裝置,保證行走扭矩和速度。前后兩側設計四個帶防脫裝置的行走輪,保證行走穩定性。圖2所示為底盤的結構圖。
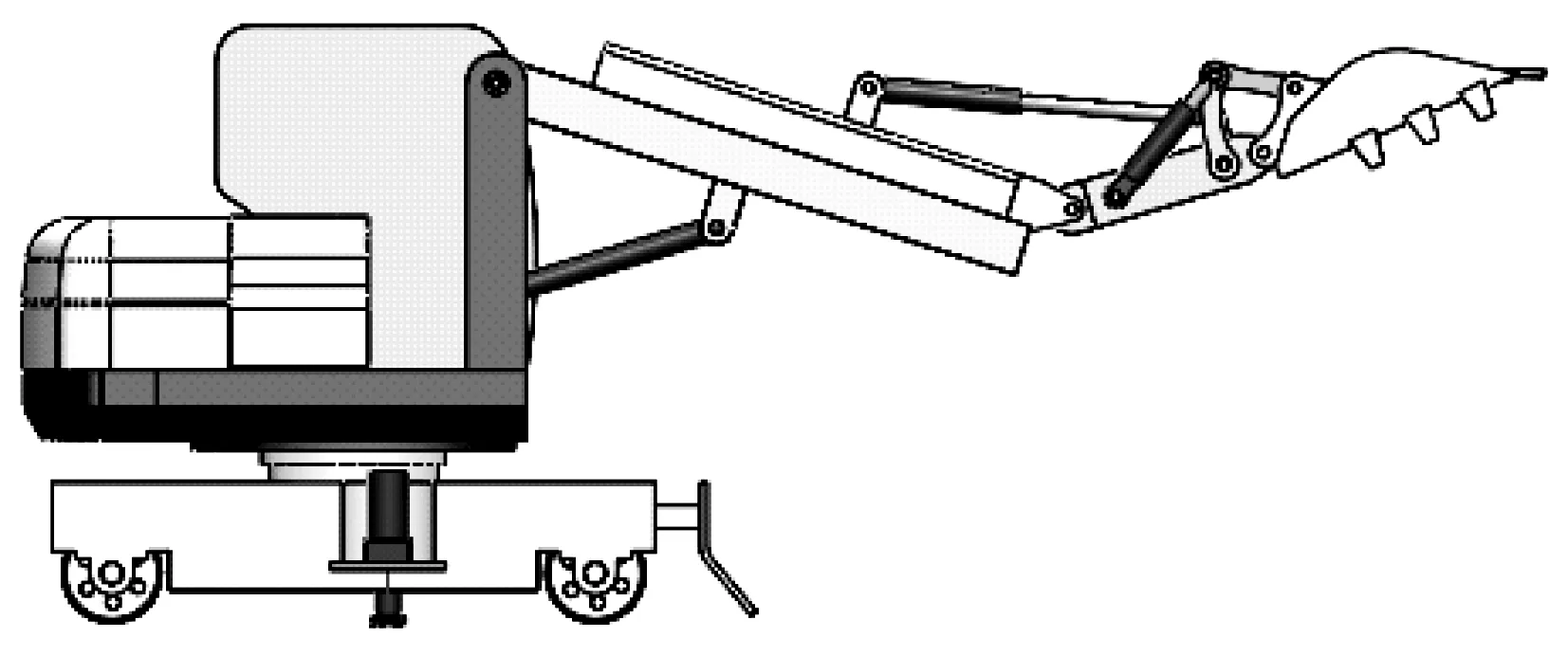
圖1 清煤挖掘機結構示意圖

圖2 底盤結構圖
3.2 工作裝置設計
3.2.1 主臂和伸縮臂設計
綜合考慮挖掘高度和制造成本的要求,采用伸縮臂的設計。為實現伸縮臂在主臂上滑動的設計,將主臂和伸縮臂外形設計為矩形狀,主臂的兩個側板內測各切出25mm×20mm的矩形長條作為伸縮臂伸縮的軌道。圖3所示為主臂的結構圖。伸縮臂兩側板外側彎折出25mm×20mm的矩形長條嵌入主臂軌道。圖4所示為伸縮臂結構圖。
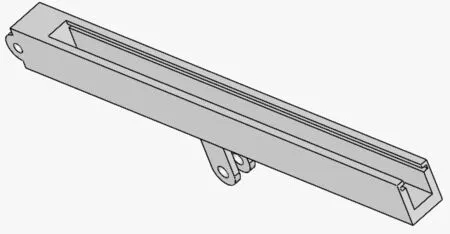
圖3 主臂結構圖
圖4 伸縮臂結構圖
3.2.2 鏟斗設計
鏟斗作業過程中,經常發生齒尖磨損情況,須及時更換齒尖和側齒。設計時將鏟斗尾部內縮、口部外擴,減少鏟斗尾部磨損程度,同時減少鏟斗設計深度,保證操作空間更大,清理更徹底。圖5所示為鏟斗結構圖。

圖5 鏟斗結構圖
4 清煤挖掘機運動學分析及仿真
4.1 清煤挖掘機的運動學分析
清煤挖掘機的工作裝置是由主臂和伸縮臂、斗桿、鏟斗前后相連的串聯機構。運用D-H法[2]建立其連桿坐標系,并列出相應的連桿參數與關節變量,代入連桿坐標變換矩陣公式,最終得到鏟斗齒尖坐標系的變換公式[3]。如圖6所示為清煤挖掘機連桿坐標系簡圖。以回轉中心線垂線與地面的交點O0建立基坐標系{O0},并分別在鉸接點O1、O2、O3、O4處分別建立桿件坐標系{O1}、{O2}、{O3}、{O4}。
連桿坐標變換矩陣公式為:
(1)
D-H參數表中對于相鄰坐標系的位置描述包括di、θi、ai、αi四個參數[4],根據已經建立的清煤挖掘機連桿坐標系,得到如表1所示的連桿參數表。其中,l2為伸縮臂伸出的長度。
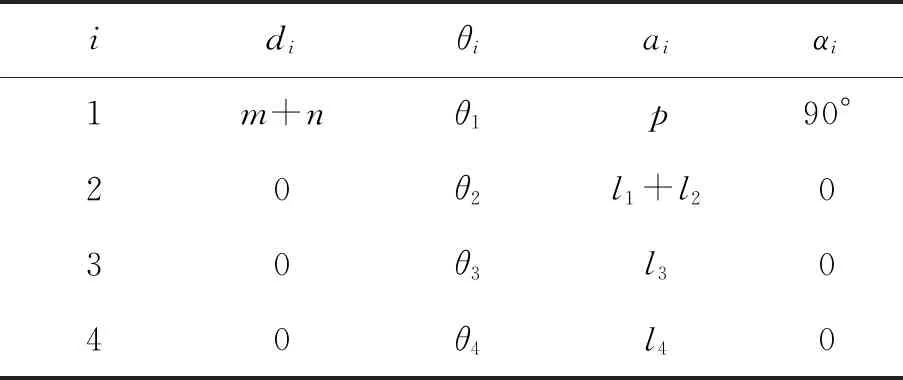
表1 D-H參數表
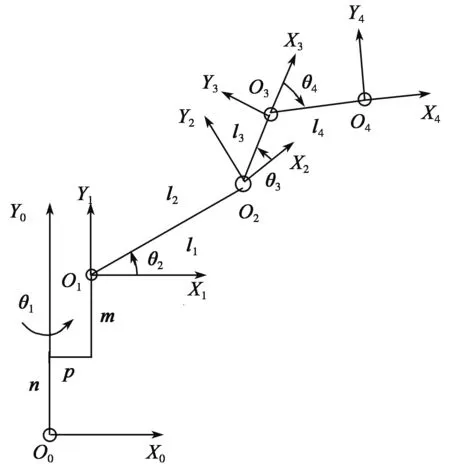
圖6 清煤挖掘機連桿坐標系簡圖
根據位姿變換矩陣的運算法則,得到鏟斗齒尖坐標系{O4}相對于基坐標系{O0}的變換公式,如式(2)所示。
(2)
式中:
Si=sinθi;Sij=sin(θi+θj);Sijk=sin(θi+θj+θk);
Ci=cosθi;Cij=cos(θi+θj);Cijk=sin(θi+θj+θk)。
由于清煤挖掘機在清理過程中,θ1保持不變,鏟斗方向角θw=θ2+θ3+θ4。
根據D-H法定義可得,鏟斗位姿向量為:
(3)
4.2 清煤挖掘機運動學仿真
Solidworks是一款功能強大、易學易用的三維設計軟件,集CAD設計、CAE有限元分析、CAM數控編程模塊等功能,對虛擬樣機技術的發展提供了技術支持[5]。因此應用其插件motion[6]實現三節臂挖掘機的運動學仿真。
清煤挖掘機的清煤過程是依靠液壓油缸的伸縮來驅動,在各液壓油缸處添加線性馬達模擬清煤挖掘機的工作過程,并采用STEP函數控制液壓油缸的伸縮[7]。表2所示為各液壓油缸的STEP函數。

表2 各液壓油缸STEP函數
在鏟斗齒尖創建測量點進行路徑跟蹤和線性位移檢測,通過運動仿真即可得圖7所示的鏟斗齒尖位移曲線圖。
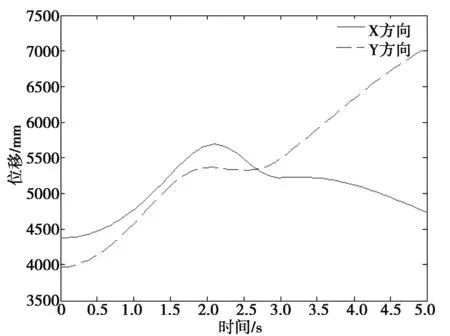
圖7 鏟斗齒尖位移曲線圖
圖7中可以看出:隨著主臂和伸縮臂的伸出,X方向和Y方向的位移呈上升趨勢,到達準備清理的階段,隨后斗桿配合鏟斗動作進行清煤工作,隨著鏟斗油缸活塞桿收回,X方向位移平緩下降,Y方向位移增加。同時可看出清煤挖掘機的最大挖掘高度可達7000mm以上。
5 結論
充分考慮到嚴寒地區清煤過程的難點,在Solidworks環境下設計一種清煤挖掘機,并對其進行運動學分析和仿真,通過軟件模擬實際清煤作業,可以得到最大挖掘高度為7m以上,符合實際場地清煤作業的要求,可為進一步的設計改進提供參考。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04