基于波帶片納米聚焦裝置的快速掃描X射線熒光成像實驗系統
2019-12-19 05:47:18蘭旭穎張招紅張繼超李愛國
原子能科學技術 2019年12期
蘭旭穎,張招紅,張繼超,李愛國,王 劼
(1.中國科學院 上海應用物理研究所,上海 201204;2.中國科學院大學,北京 100049;3.中國科學院 上海高等研究院,上海 201210)
同步輻射X射線熒光成像技術能準確獲取樣品中的元素分布,且具有高檢測靈敏度和高空間分辨率,為生物、材料和環境等領域的科技人員研究元素微區分布提供了強有力的工具[1-3]。上海光源BL15U1的波帶片納米聚焦裝置最高可實現百納米級空間分辨[4],并已對用戶開放[5-7]。但此裝置之前只實現了“走停”的掃描模式,該掃描模式不僅存在部分機時浪費[8-9],而且在“走停”模式的長時間掃描過程中,一些不穩定因素如注束、束流軌道校正等可能會導致亞微米或納米級空間分辨的成像扭曲[10-12]。為此,需建立波帶片納米聚焦裝置的快速掃描X射線熒光成像實驗系統。
由于波帶片納米聚焦裝置具有亞微米空間分辨,該裝置對樣品處光斑的定位要求是光斑在樣品處的重復定位精度≤光斑尺寸的1/10(以600 nm聚焦光斑為例,光斑在樣品處的重復定位精度≤60 nm是可正常進行實驗的基本要求),因此,在波帶片納米聚焦裝置上建立快速掃描熒光成像實驗系統的關鍵是運動控制系統重復定位精度需小于光斑尺寸的1/10,且樣品熒光計數同步獲取系統能滿足獲取熒光計數的樣品位置與熒光成像的像素點坐標嚴格一致,即保證熒光成像的準確性。
為在BL15U1的波帶片納米聚焦裝置上建立快速掃描X射線熒光成像實驗裝置,設計該裝置的運動控制系統、樣品熒光探測系統和實驗數據同步獲取系統。運動控制系統基于Delta-tau Power PMAC控制器設計閉環反饋控制、樣品臺電機運動控制和掃描軌跡。樣品熒光探測和實驗數據同步獲取系統采用Power PMAC控制器的位置比較方法設計硬件同步觸發計數器獲取熒光計數,保證獲取熒光計數的樣品位置與熒光成像的像素點坐標的一致性。將設計的實驗系統應用于BL15U1的波帶片納米聚焦裝置,以驗證實驗系統的可行性和高效性。
1 實驗設計
X射線照射樣品會產生含有樣品元素特征電子能級結構的X射線熒光信號。利用微納X射線聚焦光斑,連續逐點照射樣品,同時使用熒光探測器收集熒光計數,可獲得樣品在選定空間范圍內的元素空間分布,此即X射線掃描熒光成像方法。傳統掃描方法通過控制水平和垂直方向的電機,每個像素點均先定位樣品位置然后采集熒光信號,重復如此步驟掃描選定區域所有像素點完成實驗過程。這樣大量的時間將花費在電機啟動、定位、停止、等待的過程中,極大降低實驗效率。快速掃描X射線熒光方法,針對傳統方法的缺點,采用水平方向電機連續不停頓完整掃描1整行,水平1行掃描完成后垂直電機再換行,重復步驟完成整個掃描過程。這樣可將傳統方法行掃描浪費在電機啟動、定位、停止、等待的時間大幅度降低。在水平方向行掃描過程中,控制器在選定的像素點位置產生觸發信號同步獲取X射線熒光探測器的計數,像素點位置的精確測量和觸發是關鍵。
2 實驗裝置
波帶片納米聚焦裝置的快速掃描X射線熒光成像實驗系統如圖1所示,主要包括樣品臺、控制器、熒光探測器和計數器。樣品臺是PI P-733.2CD納米定位平臺,帶有電容傳感器,用于檢測樣品臺位置。控制器是Delta-tau Power PMAC,用于實現樣品臺的運動控制和實驗數據同步獲取,該控制器用16位模數轉換ADC卡讀取電容傳感器的測量信號,用具有18位數模轉換DAC的控制卡控制樣品臺運動并生成同步觸發信號,以觸發計數器同步獲取熒光計數。熒光探測器為單探頭硅漂移固體熒光探測器,電子學部分采用美國XIA公司的DXP系統。計數器采用具有32個通道的Scaler SIS3820,其100 MHz的采樣頻率可快速響應熒光計數的變化,保證在快速掃描模式下不會丟失計數。

圖1 快速掃描實驗裝置示意圖Fig.1 Schematic of fast scanning experimental device
快速掃描熒光成像實驗系統的實現是樣品在連續運動過程中,控制器實時讀取樣品實際位置,當樣品每移動1個像素點步長時,在該像素點位置產生1個觸發信號,以觸發計數器同步獲取探測器的熒光計數,保證獲取熒光計數的樣品位置與熒光成像的像素點坐標嚴格一致,即熒光成像的準確性。該系統實現的關鍵是樣品臺的精確運動控制和在連續掃描過程中熒光計數的同步獲取。
3 運動控制系統
基于Power PMAC控制器設計運動控制系統,該系統包括閉環反饋控制、樣品臺電機運動控制和掃描軌跡,以實現X射線熒光快速掃描過程中樣品的精確定位。
3.1 閉環反饋控制
采用魯棒控制算法旨在保證控制對象的跟蹤性能和魯棒性。考慮樣品臺對象G的鎮定問題,該對象具有標準化的左互質分解:
G=M-1N
(1)
其中,M和N為穩定的互質傳遞函數,且存在穩定的M*和N*能滿足如下的Bezout等式。
MM*+NN*=I
(2)
G相應的攝動對象模型Gp可為:
Gp=(M+ΔM)-1(N+ΔN)
(3)
其中,ΔM和ΔN為穩定但未知的傳遞函數,表示標稱對象模型G的不確定性;I為單位變量。魯棒鎮定的目標不僅要鎮定標稱模型G,還要鎮定1族由下式定義的攝動對象模型:
Gp={(M+ΔM)-1(N+ΔN)∶
‖[ΔNΔM]‖∞<ε}
(4)
其中,ε為穩定裕量,ε>0。最大化該穩定裕量即求解標準化互質因子對象的魯棒鎮定問題。
僅標稱反饋系統穩定時,圖2所示的攝動反饋系統的穩定性是魯棒的,且:
(5)
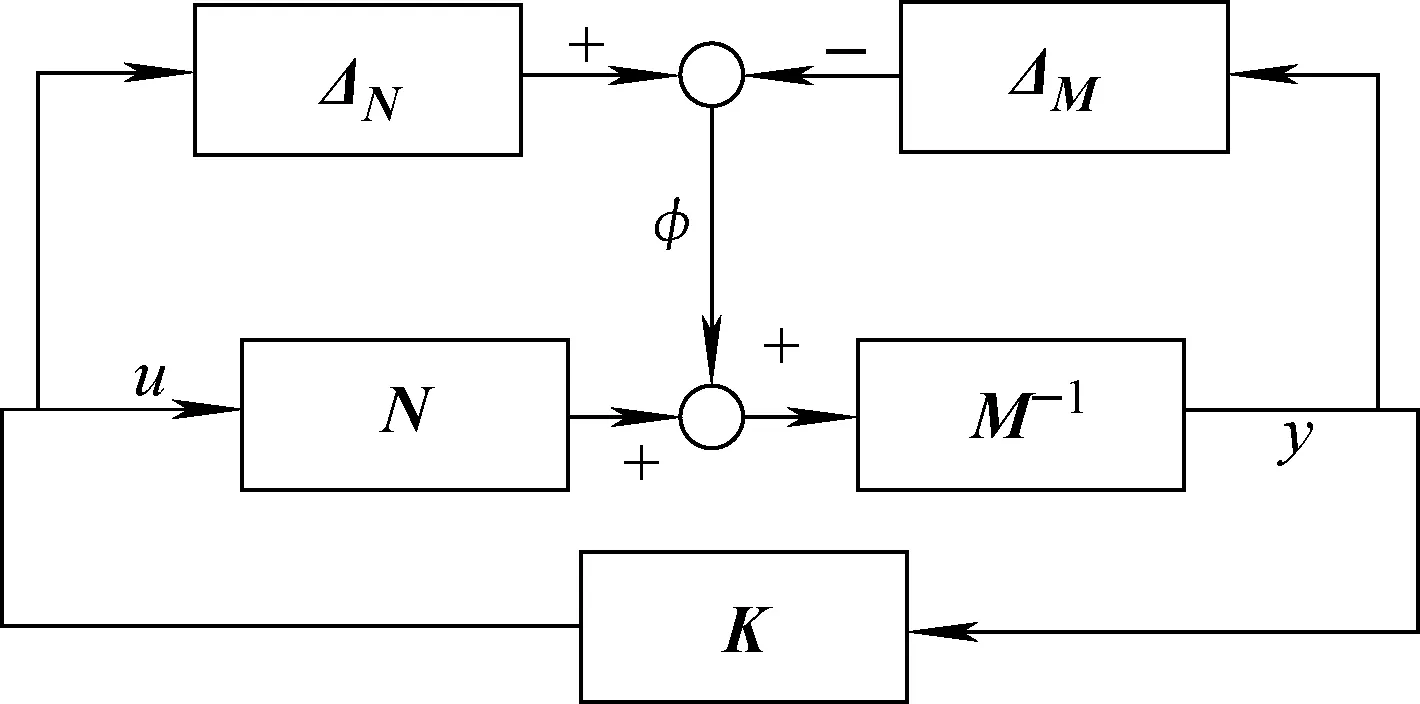
圖2 1族攝動對象的魯棒鎮定Fig.2 Robust stabilization of one family of perturbed plants

(1+ρ(XZ))1/2
(6)
其中:[NM]為N和M構成的矩陣;‖·‖H為Hankel范數;ρ為譜半徑(最大特征值);對于G的最小狀態空間實現(A,B,C,D)[13],X和Z分別是如下代數Riccati方程的唯一正定解。
(A-BS-1DTC)Z+Z(A-BS-1DTC)T-
ZCTR-1CZ+BS-1BT=0
(7)
(A-BS-1DTC)TX+X(A-BS-1DTC)-
XBS-1BTX+CTR-1C=0
(8)
R=I+DDT
S=I+DTD
(9)

(10)
F=-S-1(DTC+BTX)
(11)
L=(1-γ2)I+XZ
(12)
通過式(6)和兩個Riccati方程可得出γmin,然后通過式(10)得到控制器K。控制器K對于控制系統在不確定性擾動作用下仍能維持預期的性能具有重要意義。式(5)中,(I-GK)-1為該攝動反饋系統的靈敏度函數,可見控制器K直接影響系統的靈敏度。所設計的控制器作用是減小靈敏度函數幅值,提高系統魯棒性,使控制系統對輸入的跟蹤誤差保持在很小的范圍之內,同時將干擾引起的輸出維持在較低水平。
3.2 樣品臺電機運動控制
Power PMAC控制器實現樣品臺電機運動控制,需建立坐標系,設定樣品臺電機的起始位置與坐標系原點對應,并根據式(13)和(14)將樣品臺電機的運動方向映射到坐標軸上。設計軸定義為#1→X和#2→Y,表示將樣品臺水平方向電機#1分配給坐標軸X,將垂直方向電機#2分配給坐標軸Y。執行動作命令,電機#1和#2將根據坐標定義沿軸向運動。
(13)
#i→kAiX+kBiY+dii=1,2
(14)
其中:di為偏移量;k為比例因子。
本系統中,樣品臺采用絕對位置定位和線性運動模式。運動控制流程如圖3所示。
3.3 掃描軌跡
設計樣品臺的三角波掃描驅動方式,采用如下的三角波形函數。設計三角波掃描驅動軌跡是由于三角波是線性波形,其位置點與時間點一一對應,在三角波頻率較低時,圖像不易畸變,且易于編程實現。
(15)
其中:T1為三角波周期;A1為三角波幅值。

圖3 運動控制流程圖Fig.3 Motion control flow chart
4 熒光探測系統和實驗數據同步獲取系統
熒光探測系統由熒光探測器探測熒光信號,并通過電子學系統直接輸出到SIS3820計數器。在數據獲取前需先設置感興趣區域,當探測器探測到熒光信號時,與此感興趣區域范圍匹配的所有熒光計數均會立即輸出到SIS3820計數器。該方法僅獲取每個感興趣區范圍內的熒光數據,而不是全譜數據,因而提高了數據獲取的效率。
實驗數據同步獲取系統是用于確保獲取熒光計數的樣品位置與熒光成像的像素點坐標嚴格一致,采用控制器的位置比較方法,硬件同步觸發SIS3820計數器獲取熒光計數,該方法基于3個可設置的寄存器:比較寄存器CompA、比較寄存器CompB、增量寄存器CompAdd。分別設置比較寄存器A和B的初始值為CompA0和CompB0,CompB0為獲取的第1個像素點位置,并設置增量寄存器CompAdd的初始值為掃描步長值。當電容傳感器檢測的電機位置值等于CompA0時,控制器輸出高電平信號,此時CompA會自動增加1個CompAdd增量,其值變為CompA1。當電容傳感器檢測的電機位置值等于CompB0時,控制器輸出低電平信號,此時CompB會自動增加1個CompAdd增量,其值變為CompB1,該過程的自動增量式位置比較如圖4所示[16]。同時輸出信號的下降沿同步觸發SIS3820計數器。采用此方法在每個像素點處生成同步觸發信號觸發SIS3820計數器獲取熒光計數,其流程如圖5所示。此硬件比較觸發的設計方法具有低延時高精度的優點,且觸發信號的輸出是由實測的樣品位置與比較寄存器的值比較產生,保證了獲取熒光計數的樣品位置與熒光成像的像素點坐標的一致性,即熒光成像的準確性。
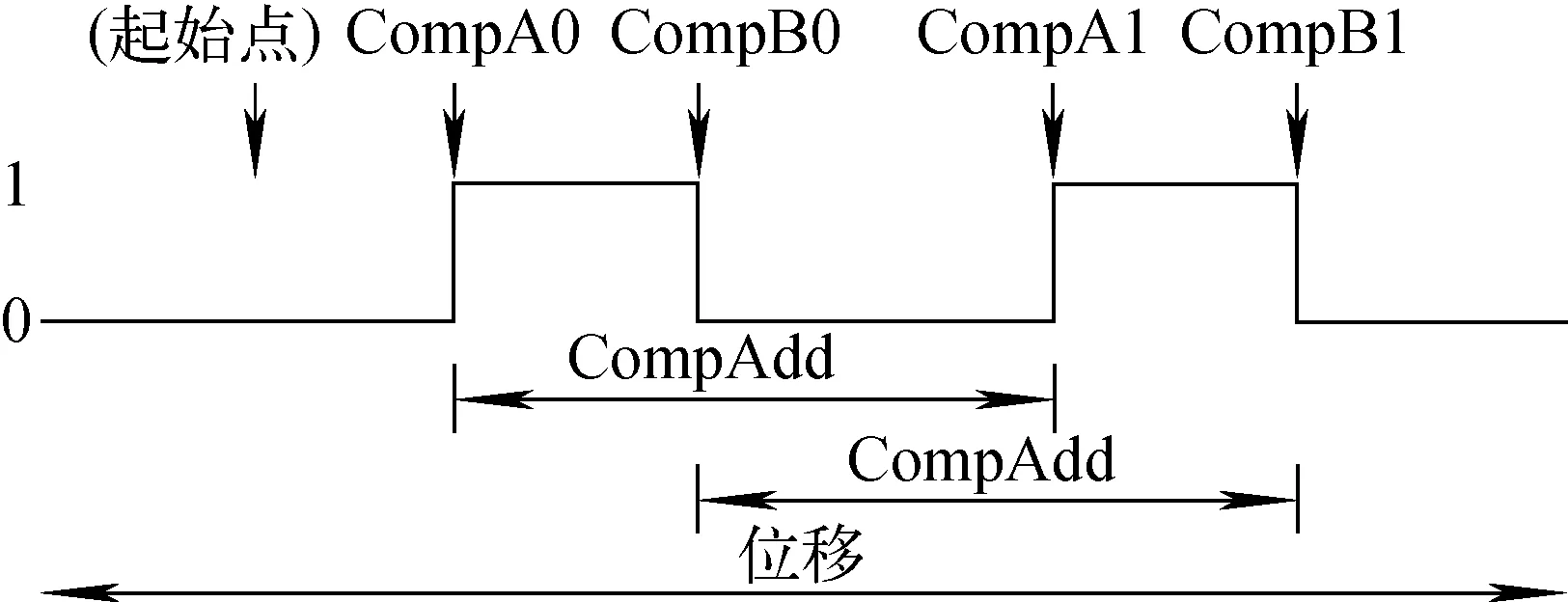
圖4 自動增量式位置比較波形圖Fig.4 Position-comparison waveform with auto-increment
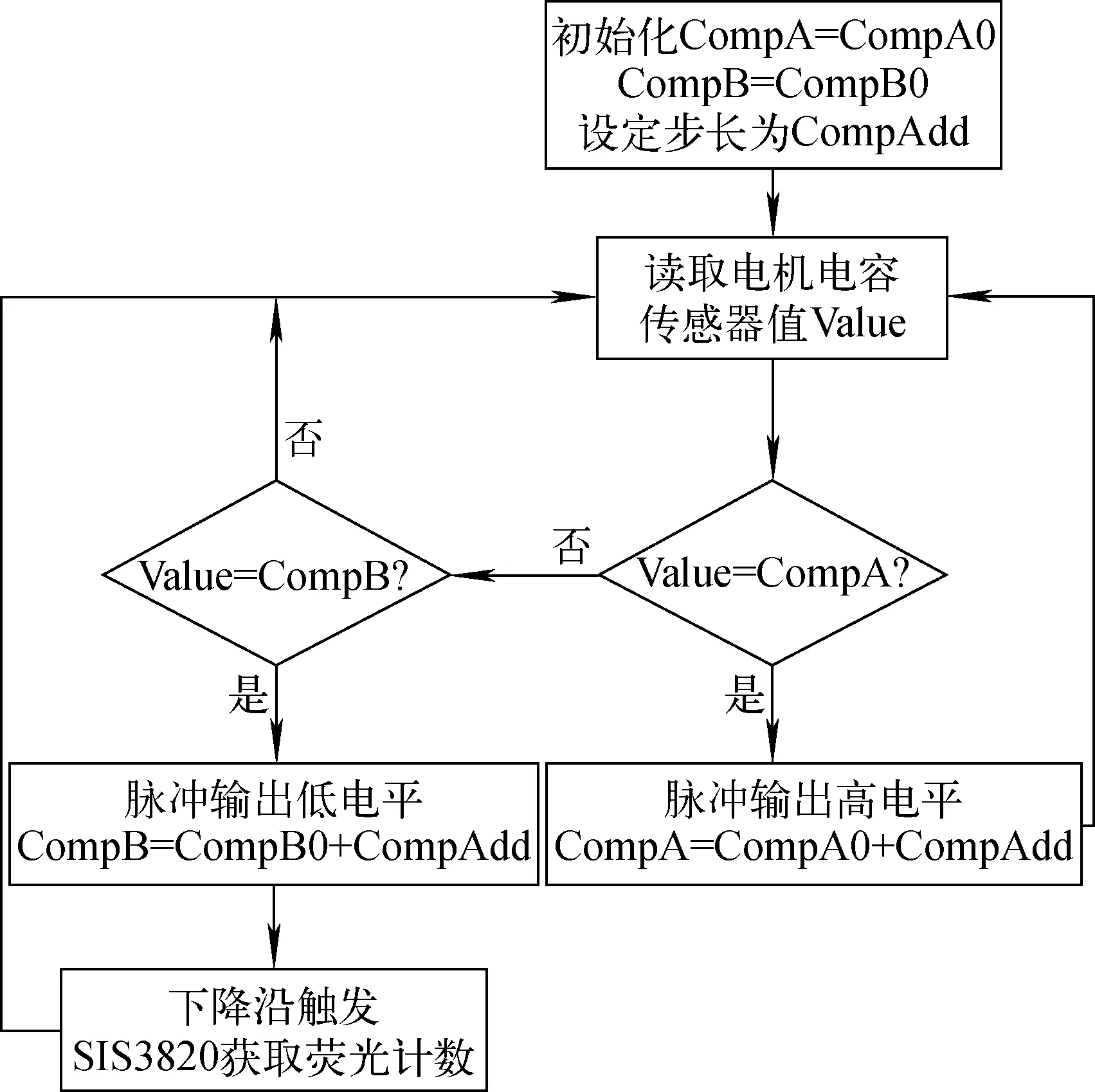
圖5 熒光計數同步獲取流程圖Fig.5 Fluorescence count synchronization acquisition flow chart
5 實驗
5.1 運動控制系統實驗
控制系統的階躍響應如圖6所示。參考輸入信號的幅值為1 μm。輸入信號幅值若選擇太小,系統響應會淹沒在噪聲信號中,無法明顯觀察到階躍信號響應。輸入信號幅值若選擇太大,系統易進入非線性區,引起性能降低,或導致控制信號飽和。選擇1 μm幅值作為參考輸入信號,輸出階躍響應具有較高的信噪比,且系統無控制信號飽和問題。另外,以1 μm幅值作為參考輸入信號,易于分析計算系統的動態特性參數。
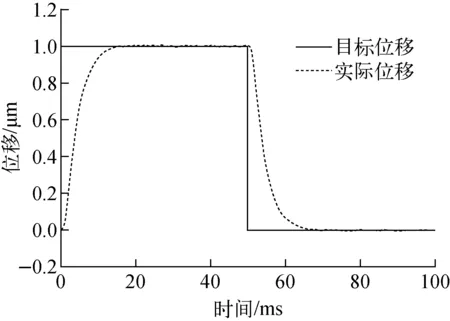
圖6 控制系統階躍響應Fig.6 Step response of control system

圖7 控制系統S(a)和T(b)的波特圖Fig.7 Bode diagrams of S (a) and T (b) of control system
控制系統的魯棒性由靈敏度傳遞函數S和補靈敏度傳遞函數T表示。S和T的波特圖分別如圖7a和b所示,根據魯棒性判斷準則[15],S可表征擾動對輸出的傳遞作用,S最大峰值位于678.32 rad/s處,值為1.21 dB,小于6 dB,則輸出對外部擾動一致衰減,系統對擾動的抗干擾能力較好,可獲得較小的跟蹤誤差。補靈敏度傳遞函數T可表征輸入信號對輸出的影響以及系統對高頻擾動的抑制,T最大峰值位于0 rad/s處,值為0,小于2 dB,表明該控制系統能有效抑制輸入的傳感器噪聲信號對輸出的影響。此外,從T的波特圖可見,在較高頻率處,T值快速衰減,表明閉環控制系統對高頻擾動具有良好的抑制作用。
控制系統的跟蹤性能如圖8所示。光斑大小600 nm,單點掃描時間0.1 s,樣品臺跟蹤幅值為60 μm、周期為20 s的三角波形(對于水平方向60 μm行程,600 nm掃描步長,單行共需掃描100個點,每個點0.1 s,則單行掃描需10 s,三角波形1個周期對應于往返的兩行掃描,則設置三角波形周期為20 s),其跟蹤誤差小于20 nm,滿足了樣品重復定位精度小于光斑尺寸1/10的要求。而在三角波形的轉折點處運動軌跡的方向和速度均有較大的變化,導致此處軌跡跟蹤誤差相對較大。控制系統的輸出跟蹤性能如圖8所示,圖8a與b的時間點相對應,取包含三角波形轉折點的一段時間內樣品臺電機的跟蹤誤差(圖8b),其誤差較大處對應圖8a中三角波形的轉折點處,最大誤差約為17.37 nm。

圖8 控制系統的輸出跟蹤軌跡(a)和樣品臺單行移動跟蹤誤差(b)Fig.8 Output tracking trajectory (a) and tracking error of sample stage moving in one line (b) of control system
5.2 快速掃描熒光成像實驗
在BL15U1的波帶片納米聚焦裝置上,應用設計的快速掃描X射線熒光成像實驗系統獲取標準銅網(銅網尺寸為2 000目/in,1 in=2.54 cm)的元素分布圖像,X射線能量為10 keV。光斑掃描并微分和高斯擬合的結果如圖9所示,其水平方向半高寬為609 nm,垂直方向半高寬為593 nm,設置掃描步長為600 nm×600 nm,即圖像的像素點大小為600 nm×600 nm。每個像素的掃描時間為0.1 s,銅網樣品如圖10a所示(由后視顯微鏡獲取)。

圖9 光斑水平方向和垂直方向尺寸Fig.9 Horizontal size and vertical size of spot

圖10 快速掃描熒光成像實驗結果Fig.10 Result of fast scanning fluorescence imaging experiment
根據上述對快速掃描熒光成像實驗系統的分析,其運動控制系統具有良好的魯棒性,且滿足樣品重復定位精度小于光斑尺寸1/10的要求。此外,X射線熒光計數的獲取由硬件同步觸發計數器實現,保證了熒光成像的質量。實驗所獲得的銅網元素分布圖像如圖10b所示。
與波帶片納米聚焦裝置之前采用的“走停”掃描模式相比,相同的實驗條件下,“走停”掃描模式獲取該熒光圖像需5 000 s,而快掃模式僅需1 000 s,快掃模式圖像獲取時間是“走停”掃描模式的1/5,提高了實驗效率。
6 結論
在上海光源BL15U1的波帶片納米聚焦裝置上首次建立快速掃描熒光成像實驗裝置。該裝置包括運動控制系統、樣品熒光探測系統和實驗數據同步獲取系統。其運動控制系統具有良好的魯棒性,三角波形跟蹤誤差小于20 nm,滿足樣品重復定位精度小于光斑尺寸1/10的要求。樣品熒光探測和實驗數據同步獲取系統采用硬件比較觸發的方法,保證了獲取熒光計數的樣品位置與熒光成像的像素點坐標嚴格一致。應用此快速掃描X射線熒光成像實驗系統獲得了標準銅網的元素分布圖像,驗證了所設計的快速掃描系統的可行性。此外,與“走停”掃描模式相比,所設計的快速掃描熒光成像實驗系統提高了實驗效率,使用戶能在同步輻射裝置有限的機時內獲取更多的實驗結果。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52