
重要電力設(shè)施防止外來(lái)無(wú)人機(jī)管控系統(tǒng)研究
2019-12-19 02:05:49方鵬張晨波張振陸德琳
科技創(chuàng)新與應(yīng)用 2019年35期
關(guān)鍵詞:無(wú)人機(jī)
方鵬 張晨波 張振 陸德琳
摘 ?要:文章首先分析了當(dāng)前我國(guó)無(wú)人機(jī)監(jiān)管的現(xiàn)狀以及管控的必要性,然后介紹了現(xiàn)有的無(wú)人機(jī)監(jiān)測(cè)與反制方法,通過(guò)對(duì)比分析得出管控方案。無(wú)人機(jī)管控系統(tǒng)分為指控分系統(tǒng)、探測(cè)分系統(tǒng)、處置分系統(tǒng)、通信分系統(tǒng),各個(gè)系統(tǒng)采用分布式組網(wǎng)架構(gòu),起到良好的防護(hù)作用。
關(guān)鍵詞:電網(wǎng);無(wú)人機(jī);管控系統(tǒng)
中圖分類號(hào):V355 ? ? ? ? ?文獻(xiàn)標(biāo)志碼:A ? ? ? ? ? ? ?文章編號(hào):2095-2945(2019)35-0041-04
Abstract: This paper first analyzes the current situation of UAV supervision in China and the necessity of UAV control, then introduces the existing UAV monitoring and control methods, and obtains the management and control scheme through comparative analysis. UAV management and control system is divided into command and control subsystem, detection subsystem, disposal subsystem, communication subsystem. Each system adopts distributed networking architecture, which plays a good role in protection.
Keywords: power grid; UAV; management and control system
引言
無(wú)人機(jī)是一種特殊的航空器,在中國(guó)民用航空局制定的《輕小無(wú)人機(jī)運(yùn)行規(guī)定(試行)》[1]中,無(wú)人機(jī)被定義為“一架由遙控站管理(包括遠(yuǎn)程操縱或自主飛行)的航空器,也稱遙控駕駛航空器”。隨著科技的發(fā)展和社會(huì)經(jīng)濟(jì)的不斷進(jìn)步,民用無(wú)人機(jī)逐步進(jìn)入人們?nèi)粘I睿⒃谶b感、測(cè)繪、防災(zāi)減災(zāi)等工作中發(fā)揮出重要作用[2]。近年來(lái)無(wú)人機(jī)非法闖入的新聞事件出現(xiàn)爆發(fā)式增長(zhǎng),電力設(shè)施關(guān)系到全面的生活,是民生工程的重要環(huán)節(jié),當(dāng)前隨著能源網(wǎng)和互聯(lián)網(wǎng)的發(fā)送,人民的生活已經(jīng)離不開(kāi)電力,若電力設(shè)施收到破壞,將極大擾亂人民的生活。同時(shí),電力設(shè)施是生產(chǎn)環(huán)節(jié)不可或缺的一部分,對(duì)無(wú)人機(jī)的管控,將極大避免重要電力設(shè)施來(lái)自空中的威脅,將大大提高現(xiàn)有電力設(shè)施的安全防護(hù)水平。
1 緒論
1.1 我國(guó)無(wú)人機(jī)監(jiān)管現(xiàn)狀
目前隨著無(wú)人機(jī)的用途越來(lái)越廣泛,2017年底我國(guó)民用無(wú)人機(jī)市場(chǎng)規(guī)模已達(dá)500億,目前無(wú)人機(jī)每年銷量百萬(wàn)臺(tái)以上,年年遞增,無(wú)人機(jī)給很多行業(yè)帶來(lái)方便的同時(shí)也正在威脅著公共設(shè)施和重要電力設(shè)施的安全。反無(wú)人機(jī)非法入侵系統(tǒng)已用于大型公司總部防止非法入侵窺測(cè),大型會(huì)議公安防止來(lái)自空中襲擊,敏感宣判會(huì)議防止記者偷拍等場(chǎng)所,但針對(duì)電力重要設(shè)施反無(wú)人機(jī)非法入侵系統(tǒng)還是空白,尚未有產(chǎn)品面世[3]。
2017年上半年已發(fā)生40余起無(wú)人機(jī)入侵電網(wǎng)造成線路跳閘等重大損失,隨著越來(lái)越多的國(guó)際國(guó)內(nèi)重要會(huì)議將在杭州召開(kāi),為了保障安全供電,防止無(wú)人機(jī)的非法入侵,通過(guò)在變電站加裝無(wú)人機(jī)低空入侵防范系統(tǒng),提出經(jīng)濟(jì)合理、技術(shù)安全的安全解決方案,對(duì)保障電網(wǎng)的可靠供電具有重要的現(xiàn)實(shí)意義[4]。
1.2 電力行業(yè)無(wú)人機(jī)監(jiān)管必要性
變電站實(shí)行無(wú)人值守后,變電運(yùn)檢人員對(duì)管轄設(shè)備也無(wú)有效監(jiān)視手段,無(wú)法實(shí)時(shí)掌握站內(nèi)設(shè)備狀態(tài)[5]。特別是火災(zāi)、防外破和設(shè)備損壞事故無(wú)法提前有效預(yù)防,同時(shí)因無(wú)監(jiān)視手段,運(yùn)維人員無(wú)法預(yù)判故障嚴(yán)重程度,需頻繁進(jìn)站檢查設(shè)備,在運(yùn)維班和變電站間反復(fù)往返,造成人力浪費(fèi)。進(jìn)行無(wú)人機(jī)監(jiān)管系統(tǒng)體系的設(shè)計(jì),能夠大大加快變電站無(wú)人值守的進(jìn)程。按照“信息安全第一、功能先進(jìn)實(shí)用、界面統(tǒng)一友好、服務(wù)基層一線”的思路優(yōu)化提升監(jiān)控平臺(tái)和完善變電運(yùn)檢管理手段,實(shí)現(xiàn)運(yùn)維班對(duì)所轄無(wú)人值守站的主輔設(shè)備運(yùn)行信息全面采集、集中監(jiān)視、狀態(tài)判斷和運(yùn)檢作業(yè)全流程管控,切實(shí)承擔(dān)設(shè)備主人職責(zé)。
1.3 研究目標(biāo)
目前在變電站的防護(hù)設(shè)備上僅有視頻監(jiān)控措施,而對(duì)于無(wú)人機(jī)的防護(hù)卻無(wú)措施。本項(xiàng)目的目的是通過(guò)在國(guó)網(wǎng)變電站內(nèi)加裝低空入侵防范系統(tǒng),用以提高電網(wǎng)運(yùn)行環(huán)境的可靠性、降低新型技術(shù)對(duì)電網(wǎng)設(shè)備帶來(lái)的新的安全風(fēng)險(xiǎn),降低設(shè)備故障率,滿足相關(guān)企業(yè)標(biāo)準(zhǔn)和反措要求,保障電網(wǎng)設(shè)備的安全運(yùn)行。
2 無(wú)人機(jī)管控系統(tǒng)的設(shè)計(jì)方案
面對(duì)無(wú)人機(jī)帶來(lái)的各種威脅,除了制訂相應(yīng)的政策法規(guī),還需要強(qiáng)有力的無(wú)人機(jī)反制技術(shù)手段來(lái)實(shí)現(xiàn)對(duì)無(wú)人機(jī)的有效管控[6]。當(dāng)前,對(duì)無(wú)人機(jī)的反制主要分為兩個(gè)階段:一是對(duì)無(wú)人機(jī)的探測(cè)和識(shí)別;二是對(duì)無(wú)人機(jī)進(jìn)行反制,讓其迫降、返航或者引導(dǎo)其安全降落。本章從監(jiān)測(cè)和反制角度對(duì)現(xiàn)有無(wú)人機(jī)管控方案進(jìn)行了梳理,并進(jìn)行對(duì)比分析。
2.1 監(jiān)測(cè)角度下的管控系統(tǒng)方案分析
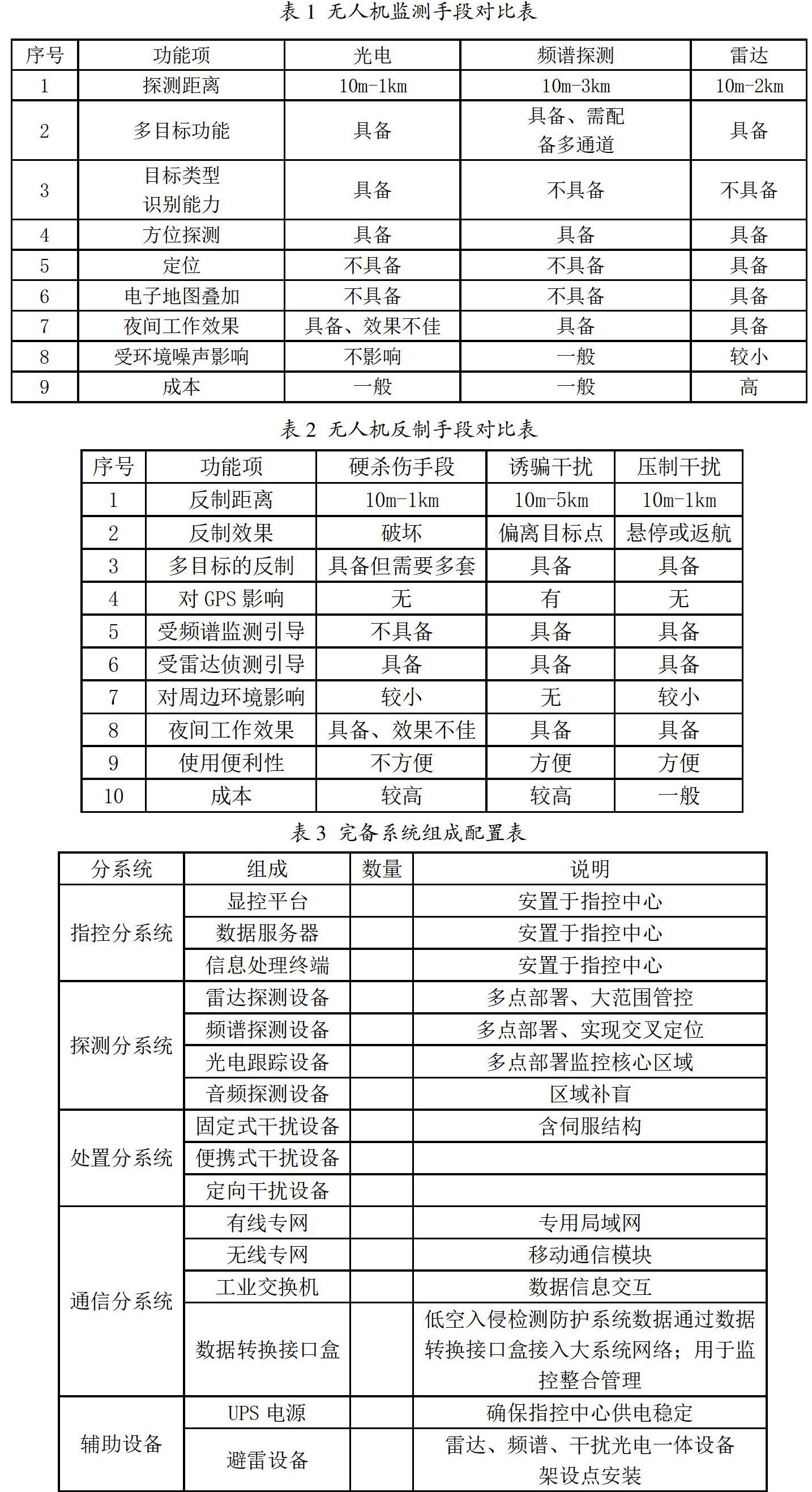
當(dāng)前常規(guī)的監(jiān)測(cè)手段主要有3種:光電、頻譜監(jiān)測(cè)、雷達(dá),這三種手段各有優(yōu)缺點(diǎn)詳見(jiàn)表1。
2.1.1 基于光電技術(shù)的管控方案分析
無(wú)人機(jī)搭載光電探測(cè)系統(tǒng)可以實(shí)現(xiàn)對(duì)目標(biāo)的搜索與跟蹤定位[7]。光電跟蹤技術(shù)是以光學(xué)成像和圖像識(shí)別為核心的探測(cè)跟蹤技術(shù),利用可見(jiàn)光或目標(biāo)的熱紅外反射,采用超視距、高清、透霧的可見(jiàn)光攝像機(jī)和紅外熱成像儀傳感器組合來(lái)進(jìn)行無(wú)人機(jī)探測(cè)。光電探測(cè)系統(tǒng)采用被動(dòng)工作模式,即由載荷操作人員選定感興趣的目標(biāo)區(qū)域,經(jīng)系統(tǒng)提取目標(biāo)輪廓,在保持穩(wěn)定跟蹤目標(biāo)的同時(shí),實(shí)時(shí)將角度測(cè)量數(shù)據(jù)傳回任務(wù)控制臺(tái)。通過(guò)光學(xué)成像、紅外成像、激光紅外成像以及熱成像技術(shù)采集無(wú)人機(jī)圖像進(jìn)行分析對(duì)比,從而判斷無(wú)人機(jī)型號(hào)、位置等。
2.1.2 基于頻譜檢測(cè)的管控方案分析
無(wú)線電頻譜探測(cè)技術(shù)主要是偵測(cè)無(wú)人機(jī)圖傳/遙控的無(wú)線電信號(hào),具備探測(cè)精度高、環(huán)境適應(yīng)性好、探測(cè)距離遠(yuǎn)、無(wú)電磁輻射等優(yōu)點(diǎn),同時(shí)對(duì)運(yùn)動(dòng)靜止目標(biāo)均能探測(cè),能夠定位飛控手位置,識(shí)別目標(biāo)型號(hào),精確引導(dǎo)干擾。對(duì)少數(shù)采用無(wú)線電靜默模式飛行的無(wú)人機(jī)無(wú)法探測(cè)。無(wú)人機(jī)與地面遙控者的“溝通”是通過(guò)遙控系統(tǒng)和數(shù)傳或圖傳系統(tǒng)進(jìn)行的,遙控系統(tǒng)負(fù)責(zé)把操作者的指令傳達(dá)給無(wú)人機(jī),數(shù)傳或圖傳系統(tǒng)把相機(jī)的取景畫(huà)面、飛行數(shù)據(jù)等信息傳給操作者,兩個(gè)系統(tǒng)均采用不同頻率的無(wú)線電信號(hào)進(jìn)行傳送。
2.1.3 基于雷達(dá)技術(shù)的管控方案分析
雷達(dá)技術(shù)是一種非常成熟的探測(cè)技術(shù),具備的優(yōu)勢(shì)有探測(cè)距離遠(yuǎn)、定位較精確、反應(yīng)速度快等,現(xiàn)階段雷達(dá)可以偵測(cè)和識(shí)別的最小無(wú)人機(jī)目標(biāo)范圍在0.006平方米到0.01平方米。但由于無(wú)人機(jī)材料具有透波特性,雷達(dá)散射面積非常小,在懸停或慢速移動(dòng)時(shí),雷達(dá)難以識(shí)別,還無(wú)法辨認(rèn)風(fēng)箏、飛鳥(niǎo)和無(wú)人機(jī)的型號(hào)。隨著無(wú)人機(jī)技術(shù)的提升,微型無(wú)人機(jī)越來(lái)越小型化,極小型的無(wú)人機(jī)會(huì)被雷達(dá)誤認(rèn)為噪聲點(diǎn)而忽略掉。
2.2 反制角度下的管控系統(tǒng)方案分析
在反制方面,目前有采用硬殺傷、誘騙干擾技術(shù)及壓制干擾技術(shù)。這三種手段各有優(yōu)缺點(diǎn)詳見(jiàn)表2。
2.2.1 基于硬殺傷技術(shù)的管控系統(tǒng)方案分析
硬殺傷手段包括高能激光、常規(guī)導(dǎo)彈、氣壓彈、激光武器、微波武器、格斗型無(wú)人機(jī)等。硬殺傷手段效果明顯,但這些方式比較極端,運(yùn)動(dòng)瞄準(zhǔn)困難,且實(shí)戰(zhàn)瞄準(zhǔn)精度要求高、造價(jià)昂貴,無(wú)人機(jī)被擊毀后墜落可能會(huì)造成其他損失不可控,墜毀殘骸可能對(duì)地面建筑和人群造成二次危害,所以使用熱武器或激光炮直接摧毀無(wú)人機(jī)的方式在民用無(wú)人機(jī)行業(yè)幾乎不可行。
2.2.2 基于誘騙干擾技術(shù)的管控系統(tǒng)方案分析
誘騙干擾技術(shù)即仿真發(fā)射虛假衛(wèi)星導(dǎo)航信號(hào),實(shí)現(xiàn)導(dǎo)航欺騙導(dǎo)致入侵無(wú)人機(jī)導(dǎo)航信息錯(cuò)誤而偏離目標(biāo)區(qū)域。誘騙干擾雖然發(fā)射功率小,但需24小時(shí)開(kāi)啟,誘騙信號(hào)會(huì)直接影響防護(hù)區(qū)域所有導(dǎo)航設(shè)備的正常使用,同時(shí)誘騙信號(hào)只對(duì)無(wú)人機(jī)導(dǎo)航信號(hào)有影響,對(duì)于遙控操作的無(wú)人機(jī)起不到管控作用。
2.2.3 基于壓制干擾技術(shù)的管控系統(tǒng)方案分析
壓制干擾技術(shù)是通過(guò)發(fā)射同頻段電磁波信號(hào),將無(wú)人機(jī)遙控信號(hào)(上行鏈路信號(hào))以及導(dǎo)航信號(hào)淹沒(méi)在干擾信號(hào)中,導(dǎo)致無(wú)人機(jī)無(wú)法接收遙控信號(hào)和導(dǎo)航信號(hào),可使無(wú)人機(jī)產(chǎn)生緩慢下降或就地返航的效果,壓制式干擾技術(shù)基本不會(huì)造成二次傷害,且效果明確,全天候適用,因其處置效果明顯,處置時(shí)間短,對(duì)周邊電磁環(huán)境影響較小,因此壓制干擾技術(shù)是目前反無(wú)人機(jī)行業(yè)絕大部分廠家采用的管制手段。
3 無(wú)人機(jī)管控系統(tǒng)的工作原理
基于檢測(cè)和反制角度下的無(wú)人機(jī)管控系統(tǒng)方案選取,我們將無(wú)人機(jī)管控系統(tǒng)分為指控分系統(tǒng)、探測(cè)分系統(tǒng)、處置分系統(tǒng)、通信分系統(tǒng),各個(gè)系統(tǒng)采用分布式組網(wǎng)架構(gòu),起到良好的防護(hù)作用。本節(jié)將從無(wú)人機(jī)管控系統(tǒng)、系統(tǒng)架構(gòu)以及系統(tǒng)工作流程進(jìn)行詳細(xì)分析。
3.1 系統(tǒng)組成
低空入侵檢測(cè)防護(hù)系統(tǒng)集目標(biāo)探測(cè)、跟蹤識(shí)別、指揮控制、打擊處置功能于一體,系統(tǒng)集成度高,適用性強(qiáng),擴(kuò)展性好,可不受氣候條件限制全天候工作。完備的低空入侵檢測(cè)防護(hù)系統(tǒng)主要由探測(cè)分系統(tǒng)、干擾處置分系統(tǒng)、指控分系統(tǒng)以及通信分系統(tǒng)四部分組成,可根據(jù)不同任務(wù)配置組合分系統(tǒng)設(shè)備應(yīng)用于重點(diǎn)區(qū)域和大型活動(dòng)的低空安防,系統(tǒng)形態(tài)可呈現(xiàn)為固定式、車載式及便攜式,可有效應(yīng)對(duì)隨著低空空域開(kāi)放及無(wú)人機(jī)廣泛應(yīng)用而日益增長(zhǎng)的各類公共安全威脅。完備系統(tǒng)組成配置如表3所示。
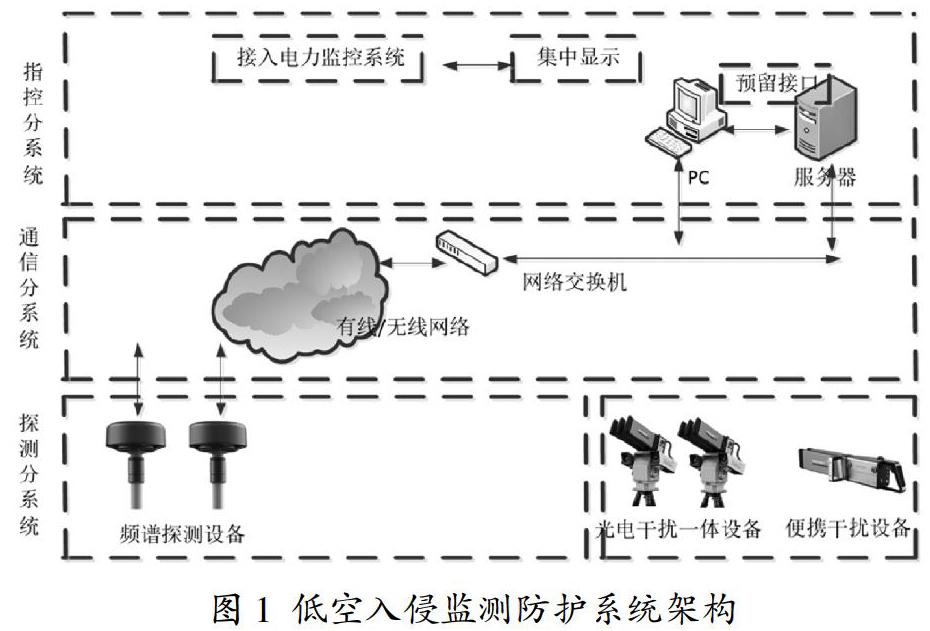
3.2 系統(tǒng)架構(gòu)
察打一體反無(wú)人機(jī)系統(tǒng)采用分布式組網(wǎng)架構(gòu),通過(guò)全I(xiàn)P網(wǎng)絡(luò)化部署實(shí)現(xiàn)低空廣域覆蓋,提供豐富的API開(kāi)發(fā)接口實(shí)現(xiàn)地面安防監(jiān)控系統(tǒng)無(wú)縫集成。低空入侵檢測(cè)防護(hù)系統(tǒng)采架構(gòu)如圖1所示。
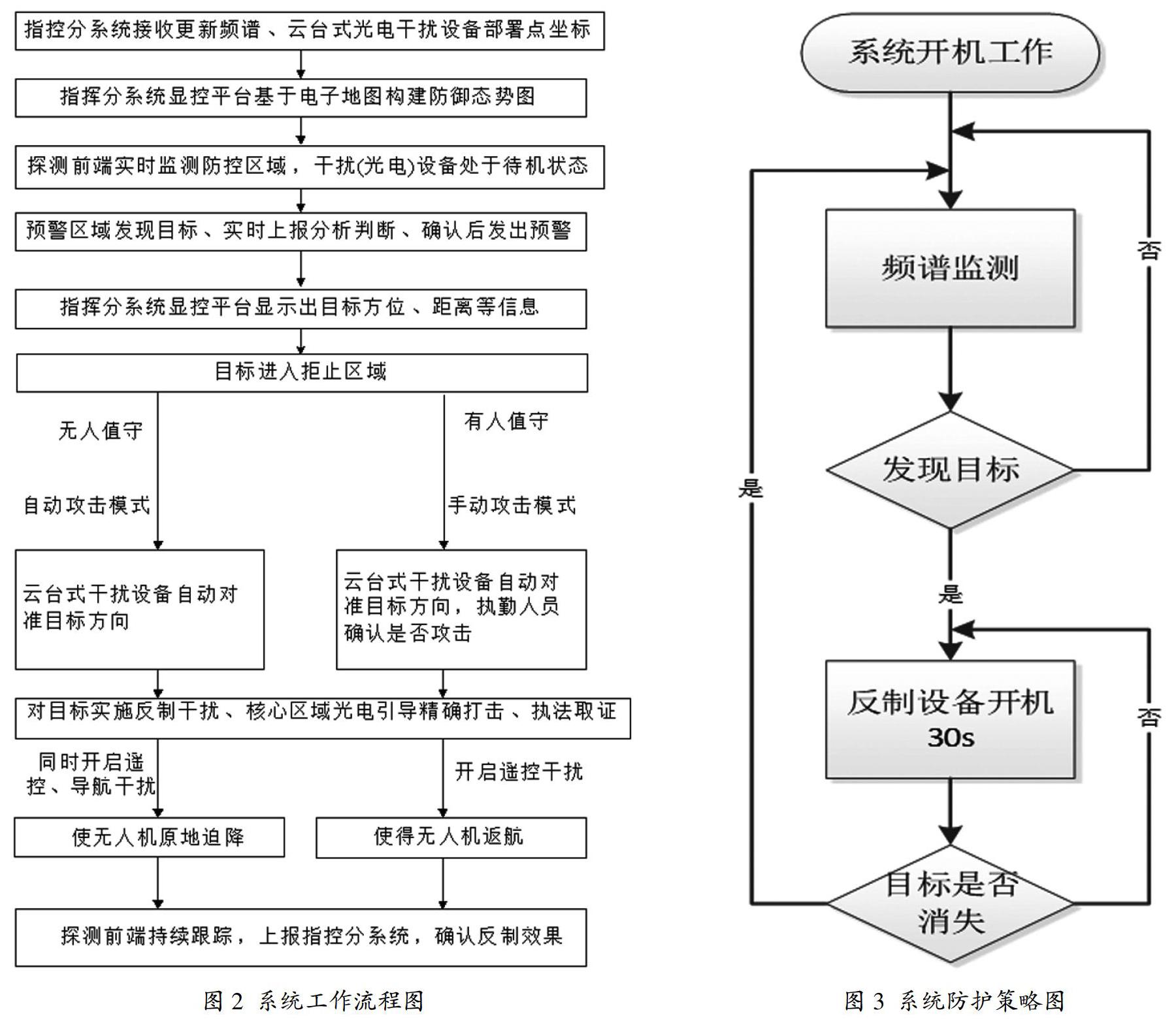
3.3 系統(tǒng)工作流程
系統(tǒng)構(gòu)建的防御態(tài)勢(shì)分為預(yù)警區(qū)域和拒止區(qū)域。在預(yù)警區(qū)域,探測(cè)前端發(fā)現(xiàn)識(shí)別入侵目標(biāo)、雷達(dá)設(shè)備遠(yuǎn)距離探測(cè)發(fā)現(xiàn)區(qū)分目標(biāo)、頻譜設(shè)備基于分布式部署實(shí)現(xiàn)目標(biāo)交叉定位,探測(cè)前端通過(guò)專網(wǎng)上報(bào)數(shù)據(jù)信息至指控分系統(tǒng),指控分系統(tǒng)分析、解算及實(shí)時(shí)顯示無(wú)人機(jī)頻點(diǎn)、方位、距離等信息并啟動(dòng)入侵預(yù)警。當(dāng)無(wú)人機(jī)進(jìn)入拒止區(qū)域,指控分系統(tǒng)調(diào)動(dòng)干擾處置分系統(tǒng)設(shè)備對(duì)入侵目標(biāo)進(jìn)行干擾處置,處置完成后,指控分系統(tǒng)調(diào)動(dòng)探測(cè)前端確認(rèn)處置結(jié)果。系統(tǒng)工作流程如圖2所示。
4 管控系統(tǒng)的防護(hù)策略
無(wú)人機(jī)防護(hù)策略是設(shè)計(jì)無(wú)人機(jī)管控系統(tǒng)的重要環(huán)節(jié),本系統(tǒng)采用完備的防護(hù)措施辦法,以確保重要電力設(shè)施安全不受無(wú)人機(jī)困擾與威脅。本節(jié)內(nèi)容就防護(hù)策略的基本原理、防護(hù)策略的基本流程、防護(hù)策略的基本方式來(lái)進(jìn)行介紹。
4.1 防護(hù)策略的基本原理
對(duì)無(wú)人機(jī)的發(fā)現(xiàn)是無(wú)人機(jī)無(wú)線電管控的首要步驟,只有在準(zhǔn)確發(fā)現(xiàn)、識(shí)別目標(biāo)的基礎(chǔ)上,才能有針對(duì)性地對(duì)目標(biāo)無(wú)人機(jī)進(jìn)行無(wú)線電管控。采用雷達(dá)探測(cè)和無(wú)線電監(jiān)測(cè)等技術(shù)發(fā)現(xiàn)疑似無(wú)人機(jī)目標(biāo)后,需要進(jìn)一步通過(guò)視覺(jué)辨認(rèn)、路徑識(shí)別等技術(shù)對(duì)目標(biāo)進(jìn)行確認(rèn)。確認(rèn)為目標(biāo)無(wú)人機(jī)后,下一步就是對(duì)目標(biāo)的定位測(cè)向,以實(shí)現(xiàn)對(duì)目標(biāo)企圖的預(yù)測(cè)和持續(xù)追蹤。可疑無(wú)人機(jī)被確定為管控目標(biāo)無(wú)人機(jī)后,可采取物理摧毀、生物抓捕、無(wú)線電干擾等壓制等手段使目標(biāo)無(wú)人機(jī)無(wú)法繼續(xù)工作。
4.2 防護(hù)策略的基本流程
系統(tǒng)防護(hù)策略如圖3所示。系統(tǒng)工作過(guò)程中,頻譜監(jiān)測(cè)設(shè)備實(shí)時(shí)進(jìn)行全空域掃描。當(dāng)發(fā)現(xiàn)無(wú)人機(jī)頻譜信號(hào)或無(wú)人機(jī)目標(biāo)后,主控計(jì)算機(jī)開(kāi)始實(shí)時(shí)跟蹤無(wú)人機(jī)目標(biāo)軌跡。當(dāng)無(wú)人機(jī)進(jìn)入系統(tǒng)設(shè)置的防護(hù)區(qū)域時(shí),主控計(jì)算機(jī)向反制主機(jī)發(fā)送開(kāi)機(jī)指令,反制主機(jī)開(kāi)機(jī)一段固定時(shí)間。若開(kāi)機(jī)結(jié)束后目標(biāo)消失,主控計(jì)算機(jī)重新進(jìn)入掃描狀態(tài)。
4.3 防護(hù)策略的基本方式
反制設(shè)備的電磁頻譜干擾策略存在以下三種常規(guī)方式:
(1)阻塞飛控
無(wú)人機(jī)失控,但有GPS信號(hào)的情況下,如果設(shè)定了自動(dòng)返航,將會(huì)自動(dòng)上升到提前設(shè)定的返航高度,通過(guò)GPS信號(hào)返航到起飛地點(diǎn)自動(dòng)降落;如果未設(shè)定自動(dòng)返航,無(wú)人機(jī)將會(huì)懸停或緩降。工作頻率一般為2.4GHz和5.8GHz,部分無(wú)人機(jī)選用900MHz。
(2)阻塞GPS(含北斗,GLONASS)
無(wú)人機(jī)飛控正常,GPS信號(hào)不正常,無(wú)人機(jī)將會(huì)進(jìn)行手動(dòng)模式操控?zé)o人機(jī),無(wú)人機(jī)姿態(tài)將會(huì)左右擺動(dòng),不穩(wěn)定,但可以通過(guò)遙控器控制。工作頻率一般為1.15-1.65GHz。
(3)阻塞飛控&GPS
無(wú)人機(jī)失控,GPS信號(hào)也不正常的情況下,無(wú)人機(jī)將會(huì)失去控制,并且姿態(tài)左右擺動(dòng),或朝某方向直飛,或緩降,或直接墜毀。
由于220kV云棲變電站內(nèi)有GPS對(duì)時(shí)設(shè)備,在阻塞無(wú)人機(jī)GPS信號(hào)的同時(shí)可能會(huì)影響到對(duì)時(shí)設(shè)備的正常工作。因此,反制動(dòng)作擬采用阻塞飛控的手段,迫使無(wú)人機(jī)返航或懸停。
參考文獻(xiàn):
[1]中國(guó)民用航空局飛行標(biāo)準(zhǔn)司.輕小無(wú)人機(jī)運(yùn)行規(guī)定(試行)[Z].2015-12-29.
[2]房建成.高性能微小型導(dǎo)航、制導(dǎo)與控制器件及系統(tǒng)集成技術(shù)研究報(bào)告[R].北京:北京航空航天大學(xué),2006.
[3]吳剛,周斌,楊連康.國(guó)內(nèi)外民用無(wú)人機(jī)行業(yè)發(fā)展回顧與展望[J].經(jīng)濟(jì)研究導(dǎo)刊,2016(12):160-162.
[4]徐德明.中國(guó)地理信息產(chǎn)業(yè)發(fā)展報(bào)告(2011)[M].北京:社會(huì)科學(xué)文獻(xiàn)出版社,2011.
[5]莫桂洋.淺談無(wú)人值守變電站的運(yùn)行管理和探索[J].山東工業(yè)技術(shù),2019(10):182.
[6]易際娟,陳美紅,王亞萍.淺談民用無(wú)人機(jī)監(jiān)管的制度困境與路徑選擇[J].法制與經(jīng)濟(jì),2018(11):72-74.
[7]王錚.無(wú)人機(jī)光電探測(cè)系統(tǒng)被動(dòng)目標(biāo)定位技術(shù)研究[J].科技資訊,2018,16(23):81-83.
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國(guó)科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
