氣體作動裝置在深空探測器的應用設計與驗證
2019-12-20 02:09:22張正峰王克成王黎珍于杭健
真空與低溫 2019年6期
張正峰,王克成,王黎珍,葉 青,于杭健
(1.北京空間飛行器總體設計部,北京 100094;2.蘭州空間技術物理研究所,蘭州 730000)
0 引言
在航天器飛行任務中,經常需要進行物體的轉移或移動,實現物體轉移的方式有多種,常見的主要包括:空間機械手、伸縮桿式傳動機構、棘齒連桿式傳動機構等空間機構[1-3]。不同的實現方式在實際應用中需要根據具體的約束和保障條件進行設計。某深空探測航天器在軌飛行過程中,需要在真空微重力環境下對某設備進行轉移,轉移的距離為630 mm,轉移過程中需要克服一定的阻力。在型號研制過程中,由于受空間、質量和控制等方面的條件限制,為了有效地利用航天器上推進系統所攜帶的高壓氣體[4],因此設計了一種氣體作動裝置轉移方案,并開展了仿真分析和地面試驗驗證工作。
1 氣體作動裝置的應用設計
如圖1所示,氣體作動裝置采用推進系統的高壓氣體作為動力源,通過金屬管路將壓力表、電爆閥、自鎖閥和噴氣組件串聯在一起,噴氣組件位于被轉移設備的后方,被轉移設備可沿轉移導軌運動至接收容器。電爆閥的作用是在非任務期間將高壓氣瓶和下游的氣體管路進行隔離,在任務期間由控制器起爆打開,以使氣體得以貫通。自鎖閥的作用是對氣路的通斷進行控制,在軌不工作時處于閉合狀態,開啟時將管路設為連通狀態,自鎖閥的打開時間可由控制器進行控制。噴氣組件的作用是將高壓氣體變為高速氣流從而在被轉移設備底部形成一定的推力。被轉移設備向前運動時,由兩側的轉移導軌保證不偏離方向,直至完全進入接收容器。
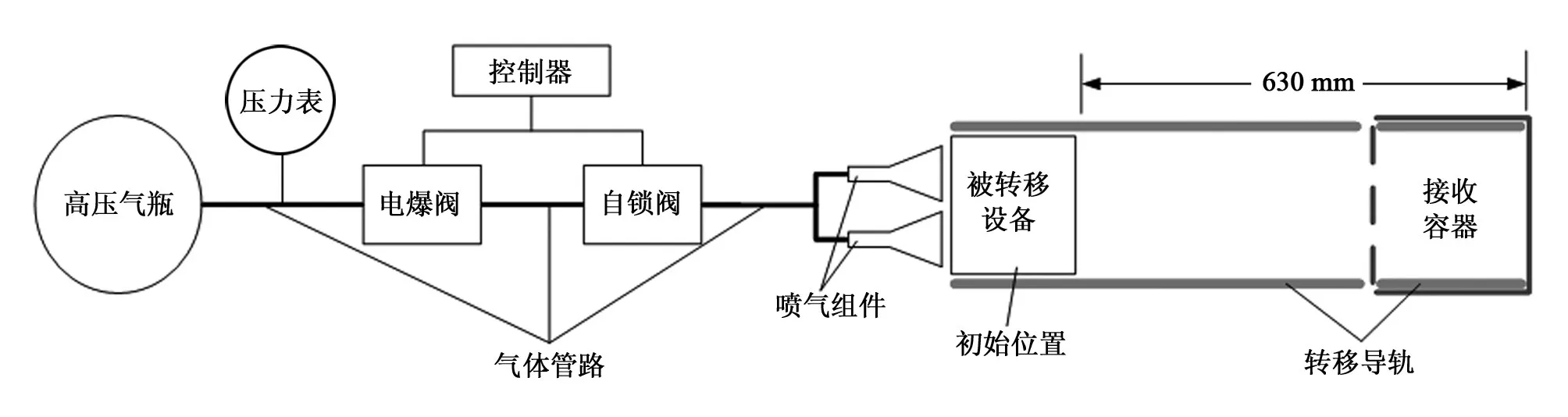
圖1 氣體作動裝置工作原理圖Fig.1 Working principle of the gas actuator
氣體作動裝置在探測器上的安裝形式如圖2所示,高壓氣瓶容積為32 L,內部為7~8 MPa的高壓氦氣,電爆管和自鎖閥開啟后的通徑分別為10 mm和4.8 mm,長度為10 mm,金屬管路內徑為6 mm,總長度為1.75 m,探測器上的溫度環境為10℃左右,偏差不大于10℃。噴氣組件包括環形氣道和2個噴嘴,環形氣道的內部截面為4 mm×6 mm,噴嘴采用拉法爾噴管形式,噴氣組件與噴嘴的結構形式如圖3所示。
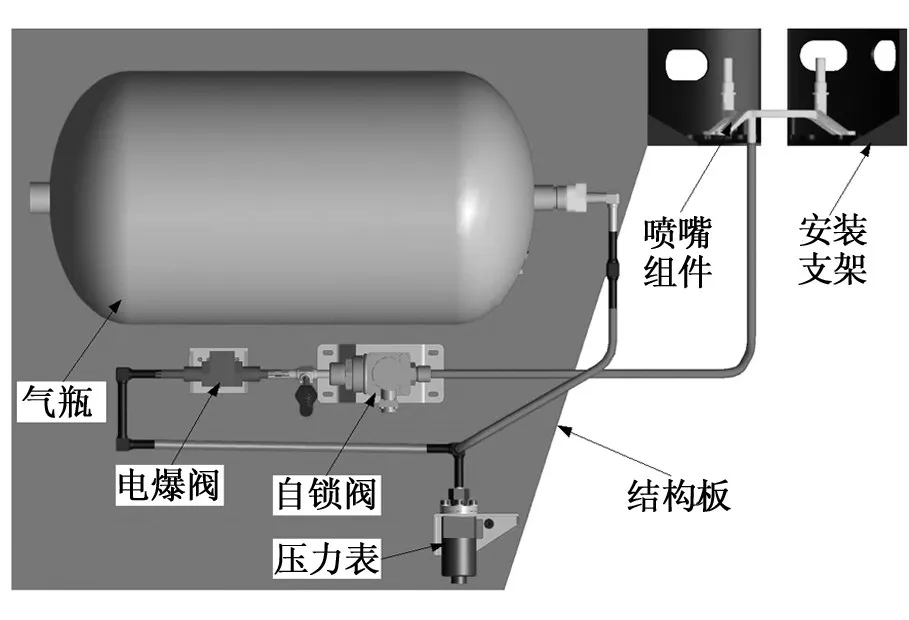
圖2 氣體作動裝置安裝示意圖Fig.2 Installation form of the gas actuator
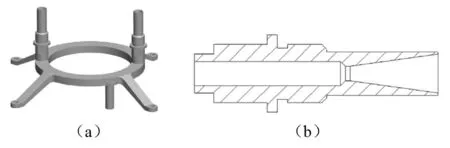
圖3 噴氣組件與噴嘴結構形式示意圖Fig.3 Structure form of the jet unit and the nozzle
設備在初始啟動時將受到最大不超過30 N的阻力,為保證被轉移設備順利到達接收容器,氣體作動裝置所產生的推力應大于30 N,以便能夠克服轉移的阻力。針對此需求,對氣體作動裝置的作用力進行了分析和驗證。
2 氣體作動裝置作用力分析
按照氣體作動裝置在探測器上的實際安裝方式,建立簡化后的氣體管路模型如圖4所示[5-6]。
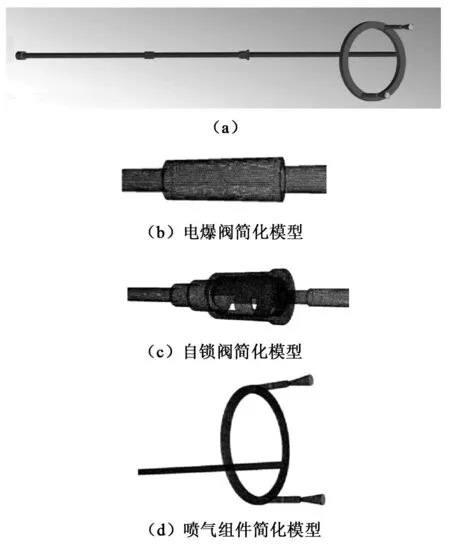
圖4 簡化后的氣體作動裝置氣體管路模型Fig.4 Simplified gas p ipeline model of the gas actuator
對氣體作動裝置作用力的分析,主要包括氣體流動過程中的阻力分析和噴氣組件所產生的推力分析兩部分,前者是為了得到氣體到達噴嘴入口處的壓力,后者是為了得到氣流對設備所形成的推力。
(1)氣體管路阻力分析
氣體在流動過程中所受的阻力可分為進口阻力、出口阻力和管道阻力三種。進口阻力是指氣體從氣瓶進入管道時流動變化產生的阻力;出口阻力是指氣體從噴嘴進入真空無限大空間時流動變化產生的阻力;管道阻力有兩種形式:一是由于氣體本身的黏滯性以及與管壁間的摩擦所產生的阻力,稱為摩擦阻力hf;另一種是氣體流經各閥門管件時,由于管件截面的大小和方向發生變化局部渦流所引起的阻力,稱為局部阻力hj。
1)摩擦阻力分析
根據流體力學原理[7],假設氣體在圓形管道內流動時截面無變化,則摩擦阻力hf可以表示為:

式中:l為管道長度;d為直徑;ρ和u分別為氣體的密度和速度;λ為摩擦阻力系數,與氣體的流動狀態和壁面粗糙度有關。如果Re≤2 500,可認為是層流,λ由Hagen-Poiseuille方程確定:

如果Re>2 500,可認為是湍流,對于光滑壁面,λ由Blasius方程決定:
2)局部阻力分析
局部阻力是指氣體在管道的進出口、彎頭、閥門、截面擴大或縮小等部位時受到干擾,發生流速和方向改變而產生的能量耗散,局部阻力hj可表示為:

式中:ζ為局部阻力系數,通常由實驗或經驗公式得到。
如圖5所示,對于管路突然縮小的情況:
對于管路突然擴大的情況:
在阻力分析時,可將進口阻力和出口阻力作為特殊的局部阻力。對于進口,可以認為由很大的截面A1突然進入了很小的截面A2,即A2/A1=0,由公式可得ζ進=0.5。對于出口,可以認為由很小的截面A1突然進入了無窮大的截面A2,即A1/A2=0,ζ出=1。
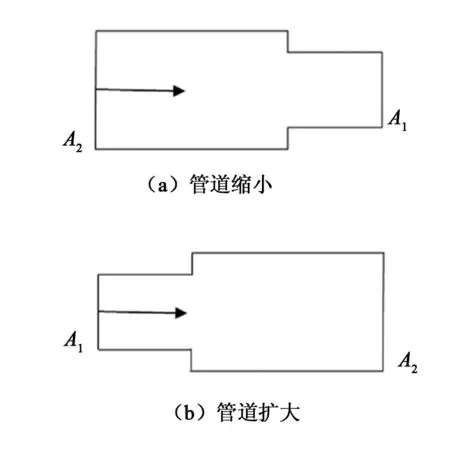
圖5 氣體管道縮小和擴大示意圖Fig.5 Shrink and expand diagram of the pipeline
3)氣體管路阻力分析
由前面的分析可知,氣體作動裝置總的氣體管路阻力H可表示為:

式中:hin為氣瓶進口的阻力;hout為噴氣組件出口的阻力;hpyro為電爆管的局部阻力;hla為自鎖閥的局部阻力;hpipe為圓形管道的摩擦阻力;hloop為噴氣組件管道的摩擦阻力。
按照氣體壓力為7 MPa進行計算。為簡化計算,按照工程方法可先假定氣體在管道內的流動為無摩擦阻力和局部阻力,遵從伯努利方程,由總壓降?p=7 MPa可得極限流速v1=?P/ρ=9 281.9 m/s,則Re為:

由此可認為管道內的流動為湍流,摩擦系數λ=
由摩擦系數可計算出管道的摩擦阻力系數,查閱文獻可得到局部阻力系數[8],即總的阻力系數Ctotal=6.351 3,由氣體管路阻力計算公式:

進而可以求得噴嘴處氣體的速度v2=3 698 m/s,在此基礎上進行4次疊代計算,阻力系數穩定為Ctotal=6.45,速度u收斂為vstable=3 654 m/s,由此可得噴嘴的入口壓力為2.52 MPa。
(2)轉移推力計算
噴氣組件噴出后的氣體作用在被轉移設備的底部,由于兩個噴嘴對稱布置,因此先利用流體力學軟件Fluent建模分析單個噴嘴的作用力[9-11]。為簡化計算,在建模時進行了二維化軸對稱處理,分析噴嘴作用到距離為50 mm、半徑為46.5 mm圓盤上的作用力Fs,計算網格如圖6所示。
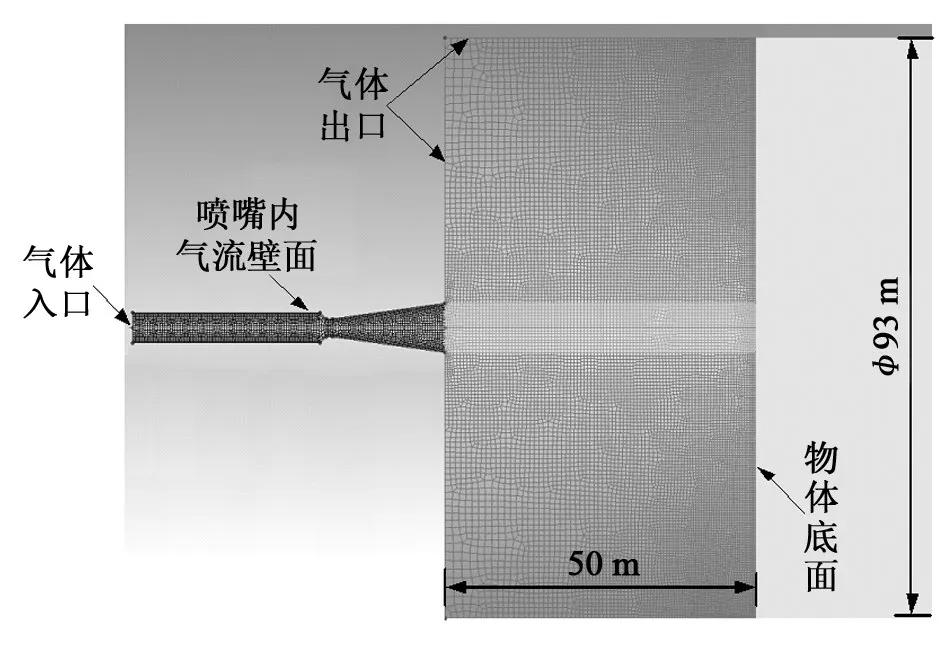
圖6 轉移推力計算網格與邊界條件圖Fig.6 Computation grid and boundary condition of the transfer force
按照噴嘴入口處壓力為2.52 MPa進行仿真分析,噴嘴氣流穩定后流場的速度分布如圖7所示,氣體對設備的作用力系數Cd收斂為37.62,在此狀態下噴嘴所產生的作用力Fs為23.04 N。
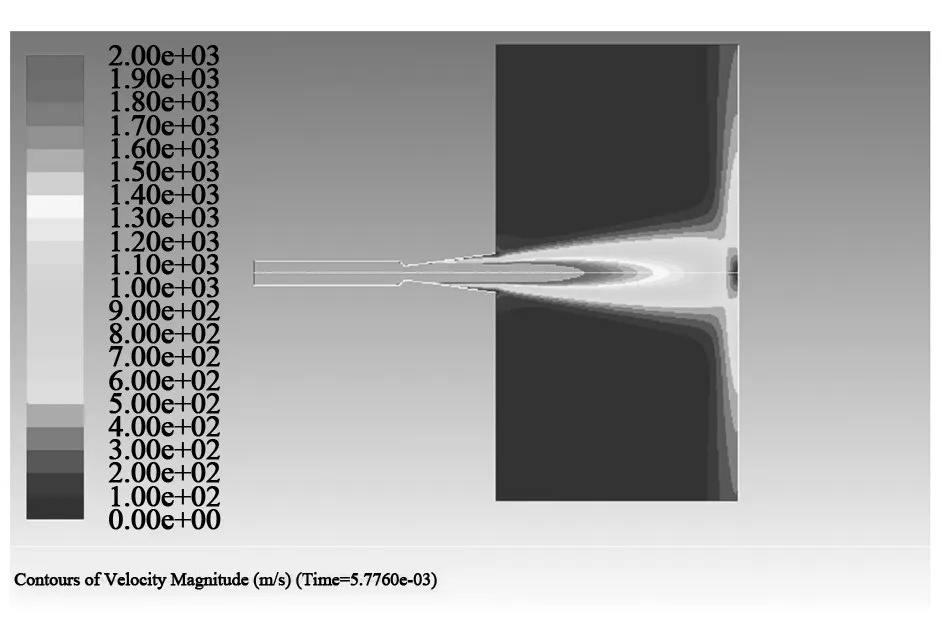
圖7 噴嘴氣流速度分布圖Fig.7 Velocity distribution map of the nozzle flow
噴氣組件總的作用力為46.08 N,同樣的可以得到不同的氣瓶壓力下的作用力。分析表明,探測器上±10℃的溫度偏差對氣體作動裝置作用力的大小影響在2%以內,影響可接受。
3 氣體作動裝置作用力試驗驗證
為了驗證氣體作動裝置作用力的大小,在真空罐內進行了測試試驗,試驗產品包括高壓氣瓶、自鎖閥、電爆閥與噴氣組件,除氣瓶采用40 L的工業氣瓶外,其余產品狀態與探測器上產品保持一致,推力測試試驗狀態如圖8所示。
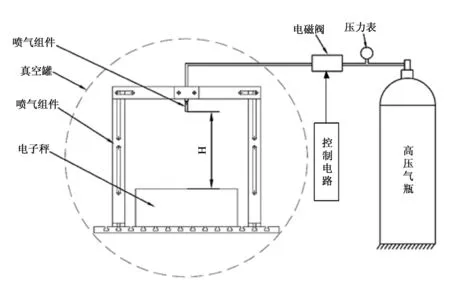
圖8 氣體作動裝置推力測試試驗狀態圖Fig.8 Status of the transfer force test of the gas actuator
試驗過程中,設置噴氣組件出口與電子秤的距離為50 mm,通過調整氣瓶壓力得到了不同壓力下的推力數據如表1所列。可以看出,氣體作動裝置的試驗數據與仿真結果誤差最大為7.4%,一致性較好,在氣瓶壓力超過5 MPa的情況下,可以產生30 N以上的推力,能夠實現物體的轉移,滿足任務需要。
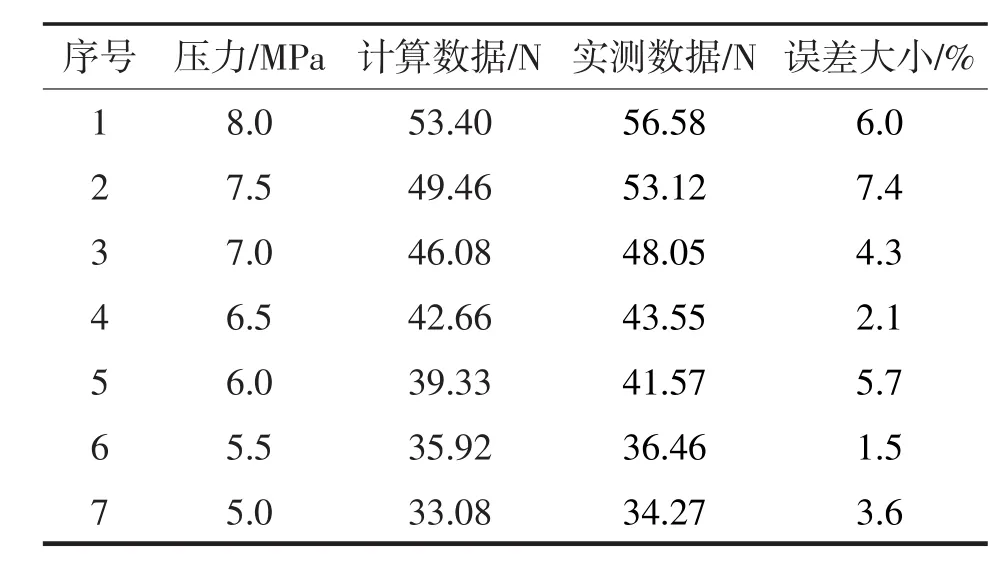
表1 推力計算數據和測試數據對比表Tab.1 Calculated data and experiment data of the transfer force
4 結論
針對深空探測器在軌飛行任務中的物體轉移問題,提出了一種利用探測器高壓氣瓶內的氣體產生推力的氣體作動裝置設計方案。按照流體力學公式完成了氣體管路的阻力分析與噴嘴的入口壓力分析,通過仿真分析得到了噴氣組件對被轉移物體的推力。并開展了真空罐內的推力測試試驗,試驗數據與仿真結果一致性較好,能夠實現物體的轉移,滿足在軌任務需要。提出的氣體作動裝置設計方案可以為空間轉移類機構的設計和驗證提供參考。
