智能化作物株間機械除草技術分析與研究
2019-12-22 02:30:58趙潤茂唐靈茂姚臘梅
農機化研究 2019年6期
伍 同,曾 山,趙潤茂,唐靈茂,杜 攀,姚臘梅
(華南農業大學 工程學院/ 南方農業機械與裝備關鍵技術教育部重點實驗室,廣州 510642)
0 引言
雜草控制是農作物植保過程中的關鍵環節,也是各國科研人員的研究熱點。在除草控制的研究中,雜草的控制方法主要分為化學除草、人工除草和機械除草。化學除草成本低,但除草劑殘留污染環境,甚至危害人體健康[1];人工除草的方式勞動強度大,且除草效率較低,成本較高[1]。對于蔬菜類等食用有機農作物生產,只能采用機械除草和人工除草方式。隨著計算機與人工智能技術的迅速發展,智能化機械除草成為一種更為可行的選擇[2]。智能化作物株間除草技術,即除草機械系統具有智能性,能夠識別作物或雜草并獲取定位信息和密集度等情況,從而精準去除雜草[3]。
普通中耕期除草技術主要是除去行間雜草,實際上株間雜草更接近作物,但與行間除草不同,作物的存在導致除草區域不連續。株間除草對作物傷害較大,通常采用的方式是人工除草。智能化機械除草技術包括行間和株間除草技術,智能、環保且高效。目前,該除草技術難點:一是作物與雜草分類技術;二是作物定位與避苗控制技術。近些年,隨著地理信息系統(GIS)、傳感器和圖像處理技術在精準農業領域的成功應用,機械化除草裝備研發也趨于智能化,但目前很多智能化除草技術的研究仍然處于理論研究和實驗室理想環境下。
對于智能化行間除草技術,很多研究成果已經轉化到農業實際操作上,技術相對較為成熟;然而,對于智能化株間機械除草,還是一個全新的范疇。常規的株間除草方式有3種:①土壤直接覆蓋;②切斷雜草的根莖;③將草連根拔起。對于株間除草來說,任何一種方式都需要先對雜草和作物定位,然后控制機械避開作物同時除去雜草。這是株間除草技術研究的重點和難點,導致株間除草技術發展較為緩慢。因此,展開智能化株間除草技術和裝備的研究十分迫切。
1 傳統株間機械除草技術
傳統株間除草裝置指的是設計特殊機械結構進行除草作業,如指形除草機和扭桿除草機;但是,以上兩種機械結構都必須與其他除草機械聯合使用,作業時容易損傷作物。有研究者設計出刷狀除草機械,按方向可分為垂直和水平。其中,水平刷狀只對控制行間雜草起作用,垂直刷狀除草機既可對行間進行作業又可適應株間除草。然而,該除草方式損傷率較高[4],且需要大量工作準備作為前提[5]。
傳統株間除草機械多數都是從行間除草裝置上衍生而來。Rasmussen和Kouwenhoven研究了操作時間、作業速度、彈性齒角度、雜草種類及雜草生長時期等一系列因素受耙式除草影響[6]。Mattson等研究了旋轉鋤的除草效果[7],Meyer等研究出一種裂根鋤[13],在土壤濕度較大、較緊的情況下,也能取得較為理想的效果。但是,傳統的除草機械都必須懸掛在拖拉機或者除草車上,大大增加了勞動量,降低了勞動效率。
日本研究機構和農機企業研制了多種水田除草機械,其株間除草部件類型主要有轉動彈齒盤、轉動傘狀盤、擺動梳齒和固定除草鋼絲[8]。農業部南京農業機械化研究所研制了2BYS-6型水田中耕除草機[9],該機水稻田除草行間雜草平均除凈率能達到78.1%,中耕深度4.39cm,作物損傷率小于6.89%。
2 株間機械除草關鍵部件
瓦格寧根大學[10](1996)研發了一種株間雜草控制系統,該裝置由直徑300mm垂直旋轉圓盤構成,圓盤上裝有兩個或多個除草刀,如圖1所示。旋轉式耙齒除草機僅能切斷土壤表面的雜草,其除草效果并不理想。

圖1 旋轉式耙齒圓盤除草Fig.1 Rotating disc tine
哈爾姆斯塔德大學(Halmstad University)(2005)開發了一種株間雜草控制系統[11],如圖2所示。除草機構利用垂直于作物行的旋轉輪割除株間雜草,通過機器視覺識別作物,檢測到作物時,旋轉輪被氣壓缸驅動提升從而避免損傷作物,旋轉輪避開作物后將被放下進行除草作業。
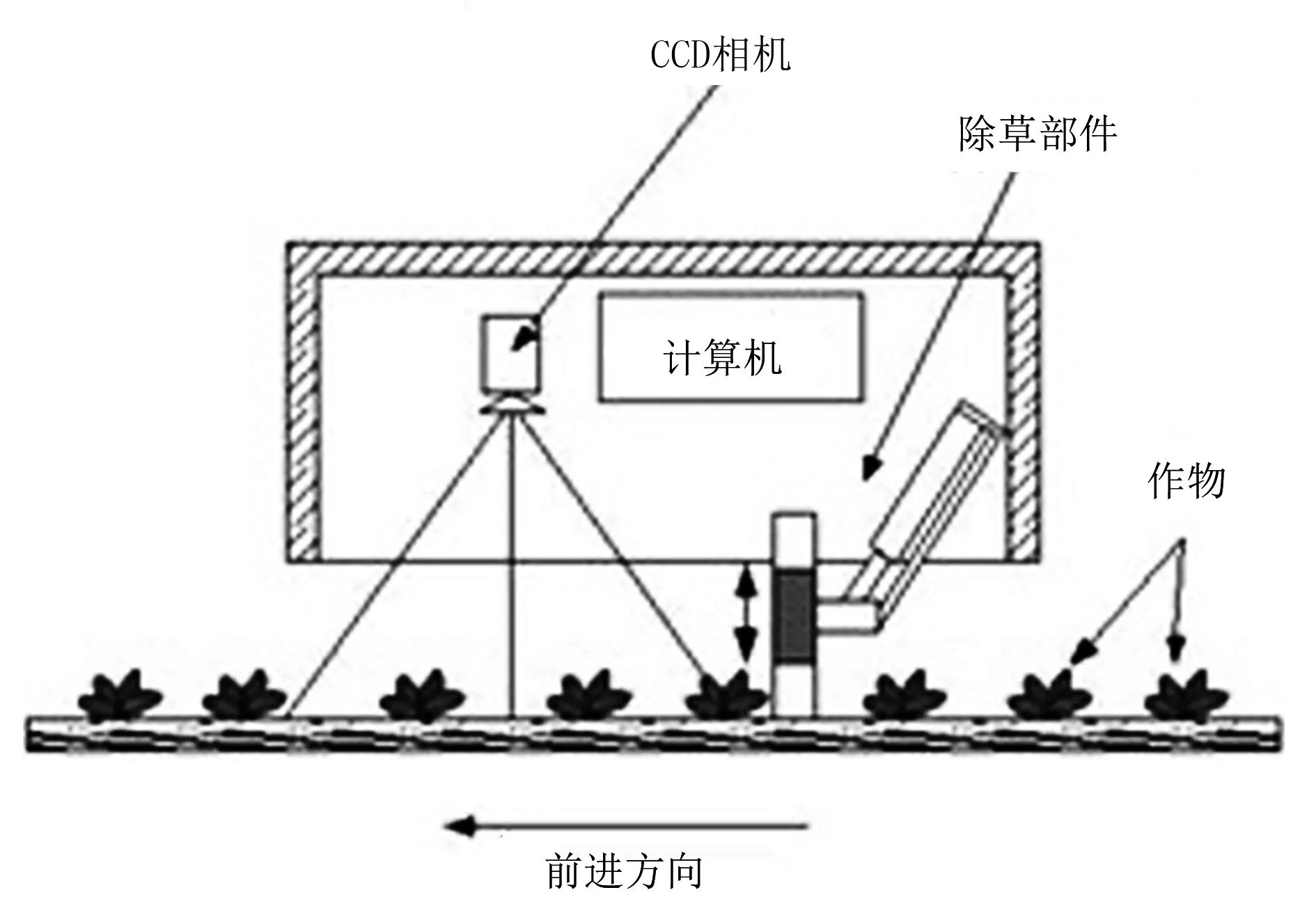
圖2 旋轉輪式除草系統Fig.2 Rotating wheel
比薩大學(Pisa University)研發了一種株間雜草控制系統[12],由通過鏈條連接的齒狀圓盤除草部件和籃狀除草部件組成,如圖3所示。工作時,通過加裝在機具后部的柔性桿實現株間除草,操作人員能通過轉向輪控制橫擺耙橫向轉動。

圖3 株間雜草控制的旋轉耙Fig.3 Rolling harrow with the elastic tines attached for intra-row weed control
波恩大學(Bonn University)在虛擬環境中開發了一種株間除草系統[13],利用懸置于作物上方的沿水平軸旋轉的旋轉鋤實現除草,如圖4所示。
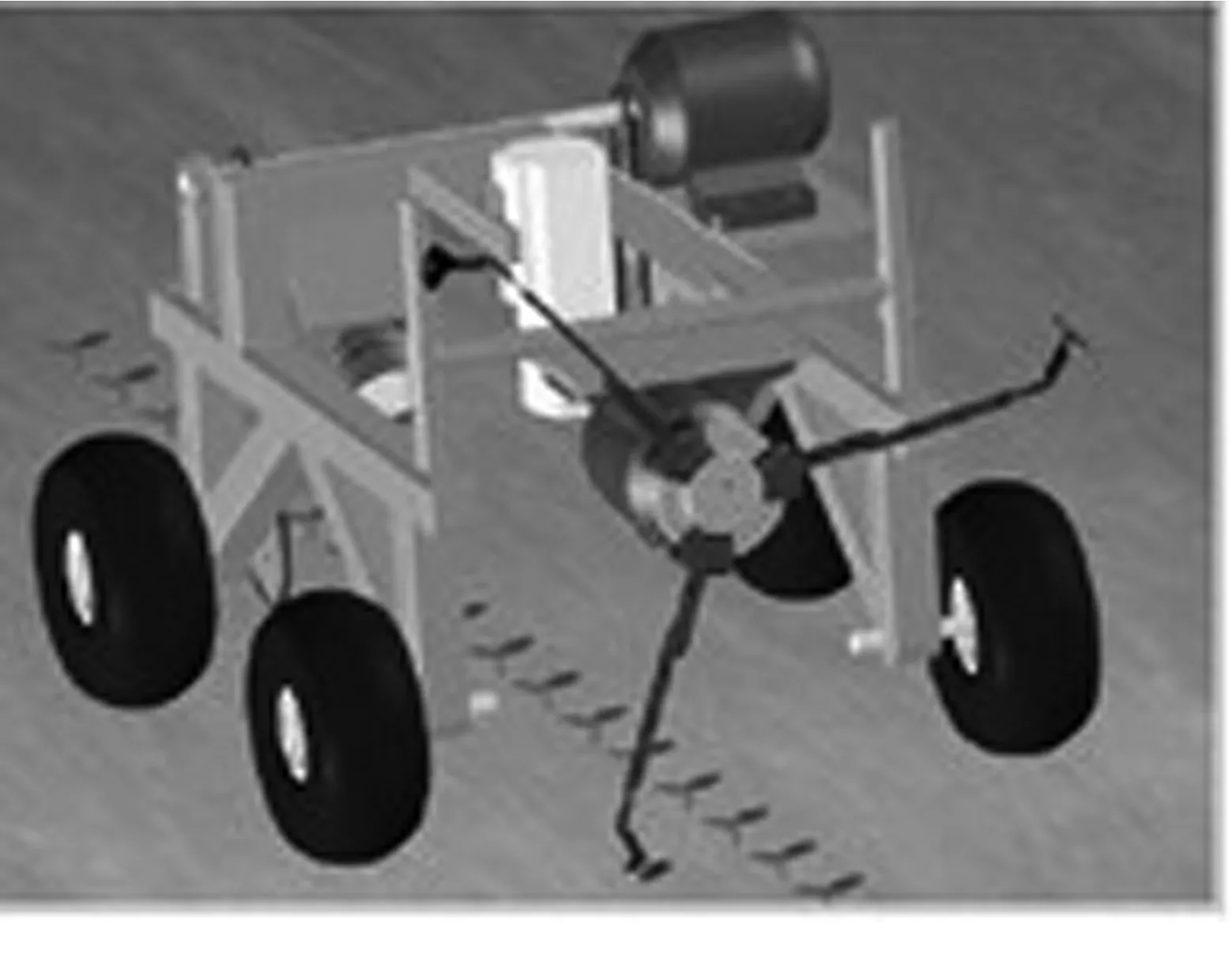
圖4 旋轉鋤Fig.4 Rotary hoe
旋轉式圓盤鋤的除草部件是一個可旋轉的圓盤,為了在株間除草時避免損傷作物,該旋轉圓盤邊沿處被切掉一部分,形成一個缺口[14],如圖5所示。Dedousis等[15]研究結果表明:以1m/s的速度對150mm株距的卷心菜進行除草作業,圓盤除草區域達95%,80%的雜草可得到有效控制,且對作物的損傷率低,未見有卷心菜被圓盤切傷而死。
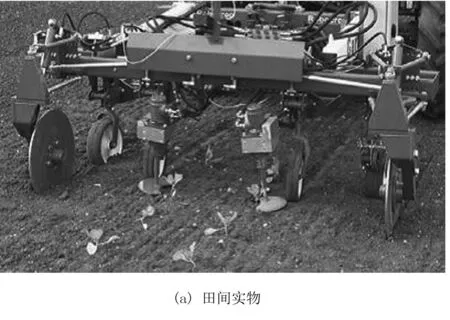

圖5 旋轉式圓盤鋤(不帶行間除草刀)Fig.5 Prototype guided rotating disc hoe without inter weeding unit
Home研制的株間中耕系統由“鴨腳”形行間除草刀和株間除草刀構成[16],株間除草刀可做來回運動,如圖6所示。該系統使用機器視覺來區別雜草和作物,當檢測到作物時,株間除草刀收攏;未檢測到作物時,電動機驅動凸輪使株間除草刀展開。根據Home[16]研究,該系統對作物的損傷與作物株距和作業速度相關性很大,隨著株距減小或作業速度增加,損傷率隨之增加。
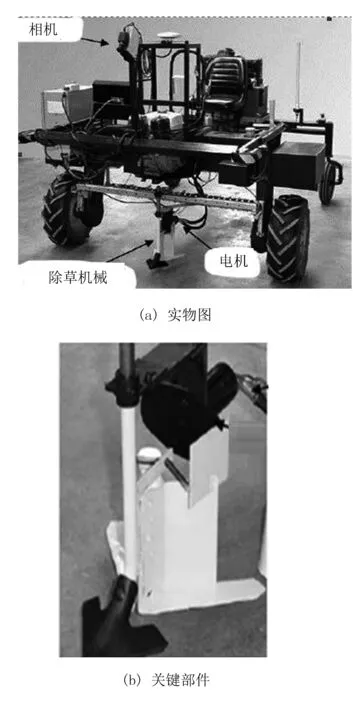
圖6 自動除草機器和株間除草刀Fig.6 Autonomous vehicle with intra-row mechanism and intra-row blade
北海道大學的Masaki TERAWAKI[17]研制了一種能在甜菜地自動苗間刀控制系統,如圖7所示。系統主要包括CCD相機、計算機、運動控制器及間苗刀,兩把苗間刀呈“V”型使其能夠閉合或者打開,如圖7所示,但系統對雜草的控制效果未見報道。

圖7 甜菜除草間苗刀Fig.7 Automatic weeding thinner
日本生研中心[18]研發的果園中耕除草機安裝在拖拉機后部三點懸掛的液壓驅動式偏移型作業機械上,除草作業部件通過主架和支撐臂連接拖拉機右側,主架通過液壓油缸伸縮可調節除草作業部件的偏移量,如圖8所示。該除草機可在樹枝伸展的果園中進行植株間的機械除草。

圖8 果樹除草機Fig.8 Weeder of the orchard
3 機器人智能化株間除草技術
Radis Mechanisation(2010)團隊研發出一種在繞軸旋轉的機械臂上安裝有除草刀株間雜草控制系統[19]。該除草機械的不足之處在于作物檢測傳感器精度不高,不能準確區分作物和雜草,且其作業速度只有3 km/h(0.77 m/s)。奧斯納布呂克大學與Amazone Werke合研制了一種機械除草控制系統[12],能除去株間和行間雜草[20]。張春龍等設計出一種除草AGV小車平臺[21],在小車上安裝一個三爪鋤草機械手,如圖9所示。小車的仿真實驗表明:為有效避免苗株損傷,在作物行兩邊各安裝一組除草機械手時,該系統鋤草率可達90%以上,但未見田間試驗結果報道。

圖9 三爪鋤草機器人Fig.9 Weeding robot with three-finger manipulator
近年來,傳感器和機器人技術成為研究熱點,使得依托于這兩種技術的除草技術也得到發展,國內外研究人員開展了許多研究。例如,為進行葉菜類移栽初期的除草,日本島根大學和兵庫縣立中央農業技術中心從1991年開始共同進行了機器人株間除草的研究[22],由立體視覺檢測雜草的三維位置,控制除草刀將雜草及其周圍的土一起挖走。Karl D.hanse等研發了一套在甜菜地中能夠對作物定位識別的系統[23],該系統基于計算機視覺,在甜菜地里對作物進行定位識別,但目前只能應用于雜草生長初期,且識別精度不高。
Hong Young Jeon等[24]開發了一種機器人雜草控制系統,由攝像機、機械臂和雜草控制機構組成,如圖10所示。除草時,上層鋸盤先切斷雜草,之后下層在雜草切面上涂上除草劑。據報道,該系統在攝像機視野內除草成功率為83%。

圖10 雜草控制機構Fig.10 Machine of weeding control
塞維利亞大學(Universidad de Sevilla)M. Pérez-Ruiz等研發出適用于移植農作物的株間除草刀自動控制系統[25],如圖11所示。該系統基于實時GPS系統來自動檢測作物地理位置,并控制1對除草刀除草路徑,使之沿著行中心線在作物間運動。試驗在加利福利亞番茄地中以0.8~1.6km/h的速度行進,結果證明:只要操作者靠近作物區域范圍在±0.5cm內,則速度0.8km/h時的標準差為0.9cm,速度1.6km/h時的標準差為1.39cm。

圖11 番茄除草刀路徑控制系統Fig.11 Tomato weed knife path control system
南京林業大學進行了機械臂除草研究(陳勇 等,2007;郭偉斌 等,2009),設計的除草機器人由本體、多關節機械臂、末端執行器及攝像頭等組成。工作時,機器人通過視覺導航沿作物行自主行走,識別出雜草后接近目標雜草并執行除草任務,除草刀盤高速旋轉切割雜草莖葉,再將除草劑涂抹到斷莖茬斷面上,然后繼續前行。
Lin Chen等[26]提出了一種除草平臺的自動調平系統,如圖12所示。機器人在株間行走除草時,末端執行器不隨底盤姿態變化而傾斜。試驗數據表明:調平后割草刀的傾斜度低于0.25°,橫滾俯仰角低于9°,但僅適用于大白菜和洋蔥除草。

圖12 除草機器人自動調平系統Fig.12 Levelling system for weeding robot
日本福井大學和南昌航空大學[27]聯合研制了一款水田機器人來進行水田除草[18]的理論模型,設計了一個機械臂安裝在小車上,利用立體相機觀察稻田,傳遞處理信息給稻田機器人,從而達到遠程控制機器人去除雜草的目的。機器人主要具備3種能力:①在水田中作業時能探測到障礙物;②智能化操作和移動;③所有的作業均能通過遙控來進行。水田除草機器人如圖13所示。
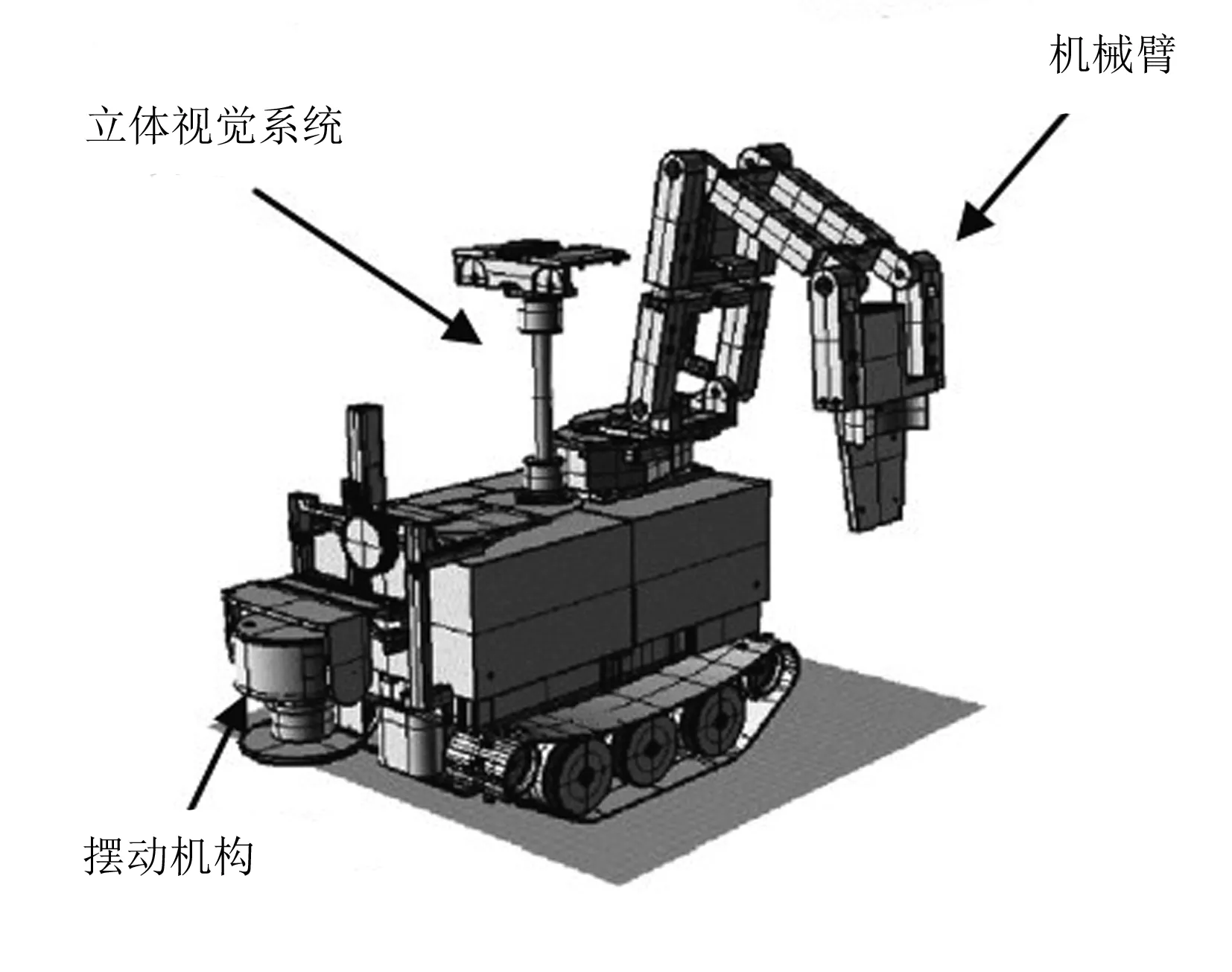
圖13 水田除草機器人Fig.13 Weeding robot for paddy field
奧爾胡斯大學的Bo Melander等[28]在洋蔥地和白菜地分別做了兩個對比試驗,以除草和收獲效果為準。在兩塊作物地智能除草試驗中,僅能估計除草效果。試驗結果顯示:智能化除草系統在該試驗中與簡單除草方式有差異,其在不需要人工操作的情況下能夠有效控制雜草。試驗裝置如圖14所示。

圖14 智能株間機械除草刀Fig14 intelligent mechanical intra-row weeder
4 總結和展望
本文對國內外智能化機械株間除草技術做了綜述,并對其關鍵技術進行了介紹和評價。然而,目前國內對智能化株間機械除草技術與機具的研究還較少,主要集中在株間機械除草機構的結構設計與研究,至今未見有成熟的智能化株間除草系統應用于農業實踐。存在的主要問題有:
1)目前智能農業已經成為各大高校及相關科研機構的研究熱點,也有較多研究成果面世;但是,多數都是從某個方面來解決部分問題,沒有從農業機具的整套系統角度來著手研究,絕大部分研究都偏向于圖像處理領域,在實際應用中還存在一定問題。
2)識別并定位作物是目前株間機械除草的重點和難點。農田作物行不像工業自動化軌道那樣可以做到幾近直線或路徑比較規整,植株也不像工件那樣可以做到標準化,各植株間差異較大,所以作物識別與定位成為一大難題。解決這一問題有很多方法,可使用傳感器、機器視覺和GPS定位技術等。就目前的研究程度來說,傳感器能很好地區分雜草和作物,但精度有待提高;基于機器視覺技術的研究又受當前圖像采集、傳輸和算法處理速度的影響,導致作業效率不高,且田間環境多變,識別算法沒有較好的適應性;GPS定位技術,其系統較為復雜,成本昂貴,作業時需要精確的路徑圖,在田壟間作業也不靈活,目前還難以得到廣泛應用。
3)目前,對于株間機械除草技術的研究主要集中在像蔬菜等一些植株較矮的作物上,機械可以橫跨在農田上進行作業。像果園類等植株較高的作物,相關理論研究報道較少,這類作物都要求機械能夠在植株之間工作,由作物的側面進入進行除草作業,靠近作物時退出避免損傷作物。
通過以上問題分析不難發現:在現有的一些研究中,雖然應用了自動導航技術進行作物定位跟蹤,但其精度難以滿足株間除草的需要。因此,研究結構簡單的株間機械除草裝置和可靠的控制系統、通過低成本傳感器實現高精度自動作業,有助于加速株間機械除草技術的研究進度與應用推廣。隨著算機圖像處理算法的不斷更新,深度學習技術應用更加廣泛,智能化株間機械鋤草技術也將會迎來更大的發展機遇,把各種作物、和雜草的相關特征參數做成數據庫,實現作物株間機械除草在線實時控制,目前存在的作物識別與定位的難題將會得到更好的解決,全過程自動高效高質量的作物株間機械除草將不難實現。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
科教新報(2022年22期)2022-07-02 12:34:28
印刷工業(2020年4期)2020-10-27 02:45:52
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國交通信息化(2017年4期)2017-06-06 07:21:52
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
能源(2015年8期)2015-05-26 09:15:56
現代農業(2015年5期)2015-02-28 18:40:49
