履帶式果園作業車平地直行和轉向仿真研究及試驗
2019-12-22 02:31:16黨革榮薛楊春王耀鳳
農機化研究 2019年6期
關鍵詞:作業
崔 恩,黨革榮,程 健,陳 軍,薛楊春,王耀鳳
(1.西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100;2.西安市農機監理與推廣總站,西安 710065)
0 引言
我國是世界上最大的水果生產國和消費國,隨著水果種植業的不斷發展,果園機械的開發需求正在不斷的提升,未來我國果園采摘機械的發展趨勢主要體現為多功能化、操作簡便、可靠性高、通用性好及自動化和智能化等特點[1]。履帶式作業車輛作為采摘機械的一種類型,具有良好的通過性能,在農業機械、建筑行業及軍事領域發揮著十分重要的作用[2]。本文以研制的履帶式果園作業車為研究對象(見圖1),采用多體動力學仿真軟件RecurDyn對果園作業車進行動力學建模,通過仿真試驗來研究履帶式果園作業車在不同工況下的動力學性能[3-4],并通過實地試驗對仿真結果進行簡單驗證,旨在為履帶式果園作業車進一步的改進設計提供理論參考依據。
1 整機仿真模型的建立
運用多體動力學仿真分析軟件RecurDyn自帶的履帶車輛子系統Track(LM)建立履帶式果園作業車三維多體動力學模型如圖2所示,設置整機各部分質量如表1所示。整機模型包括履帶底盤、車架、升降平臺及油箱等部件,履帶底盤由驅動輪、導向輪、支重輪、托帶輪、履帶板等各種履帶行駛系統組件組成[5]。按照簡化原則,在不影響仿真結果的情況下,對一些零部件(如螺栓、螺母等)做出適當的簡化來提高仿真速度。

圖1 履帶式果園作業車Fig.1 The tracked of orchard vehicle
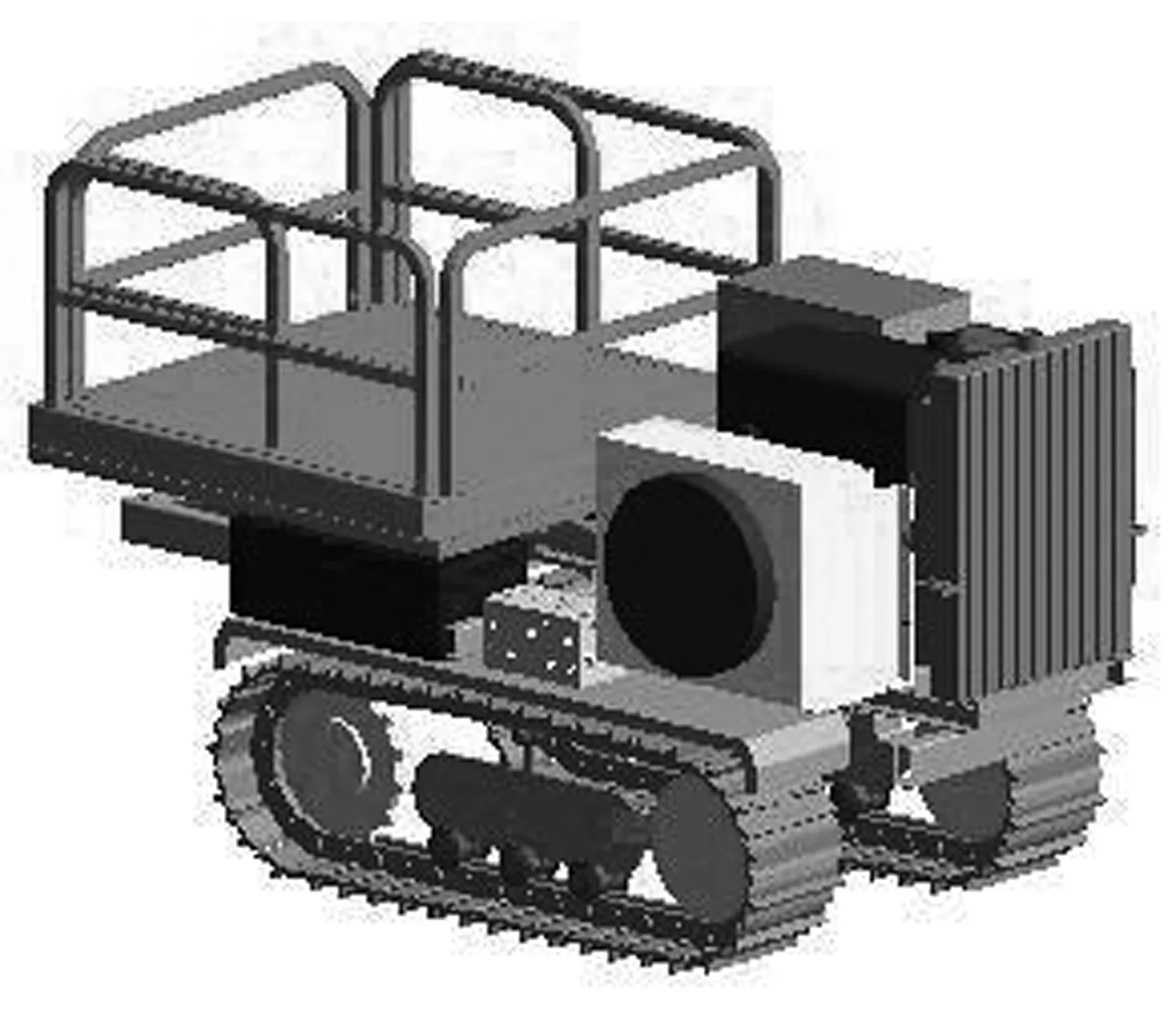
圖2 履帶式作業車仿真模型Fig.2 The tracked of orchard vehicle simulation model

表1 履帶式作業車各器部件質量Table 1 Mass of each for the tracked of orchard vehicle component kg
為了使仿真結果更加接近真實情況,需要在兩構件之間添加約束,在相對運動的部件間增加摩擦因數。機構內部的摩擦阻力系數通常取經驗值,本文在RecurDyn中取各個旋轉副的摩擦因數為0.07。
履帶式果園作業車采用液壓馬達驅動作為動力輸出裝置,液壓馬達輸出動力使驅動輪轉動,從而促使履帶帶動整機行駛。通過預設的驅動函數分別作用于左、右兩側驅動輪上,進而通過液壓馬達輸出的動力,實現作業車的行進運動。
本文在RecurDyn軟件中使用的是STEP函數對整機施加驅動。該函數采用三次多項式逼近階躍函數,表達式為
(1)
式中x0—階躍起點的自變量值;
x1—階躍終點的自變量值;
h0—階躍起點的函數值;
h1—階躍終點的函數值。
2 地面模型與地面力學關系的建立
履帶式行走車輛在進行仿真建模和分析時要建立與實際路況相接近的相應正確力學模型,因此在對履帶式果園作業車進行動力學仿真研究的過程中將作業車底盤部分與行進地面間的相互關系作為首要考慮因素。
在研究行進地面的力學特性時,首先需要將土壤的變形用土壤的承壓特性和剪切特性表示[6]。在堅實地面路況上,通過履帶車輛與地面之間相互作用產生的接觸力來反映履帶與行進地面之間的壓力,在RecurDyn軟件中接觸碰撞力F計算公式為
(2)
式中q-q0—地面沉陷量;

相關理論和試驗證明,指數n取2~3時計算所取得的仿真效果速度最佳,同時土壤阻尼c和剛度系數k對仿真結果也有較大影響。基于美國專家貝克提出的壓力—沉陷關系式,確定履帶對軟地面的正壓力計算公式為
(3)
式中Kc—土壤內聚力變形模量;
b—履帶板寬度;
Kφ—土壤內摩擦變形模量;
Z—土壤沉陷量。
在多體動力學仿真軟件RecurDyn中,履帶在接觸的地面上產生剪切作用,剪切力-位移關系式為[7]
(4)
式中c—地面壓力為0時的最大剪切應力;
p—地面壓力;
φ—土壤內摩擦角;
j—剪切位移;
k—水平剪切變形模量。
本文研究的履帶式果園作業車,主要在北方的砂壤土果園下進行作業。在RecurDyn軟件中進行動力學性能分析時,將砂壤土設為地面模型土壤,參數如表2所示。

表2 砂壤土基本參數Table 2 Parameter of sandy loam
3 履帶式果園作業車仿真分析
進行運動學和動力學分析之前,在RecurDyn軟件中首先進行樣機模型的預分析和靜平衡階段探究,確保分析結果的有效性和準確性[7]。通過預分析得出履帶式果園作業車的仿真模型中共包括29個剛體和2個履帶裝配體,整機自由度為484個,沒有冗余約束。所謂靜平衡階段分析,是指整機模型在自身重力的作用下自然落到水平地面模型上,并緩慢進入靜平衡狀態的過程。
3.1 平地直行工況分析
通過分析履帶車輛的接地壓力、履帶行走過程的總阻力、沉陷深度等指標來驗證履帶式作業車輛直線平地行駛性能,包括能否在預設的平地上完成直線加速、勻速、減速及停止的運動。在此仿真模擬過程后,對實驗中仿真的數據進行提取和研究分析。選定履帶底盤裝置中第1塊履帶板記為履帶板A,通過履帶板A的縱向位移變化及履帶板與地面的間的應力力變化來反映整機模型的沉陷深度和接地應力,如圖 3和圖4 所示。
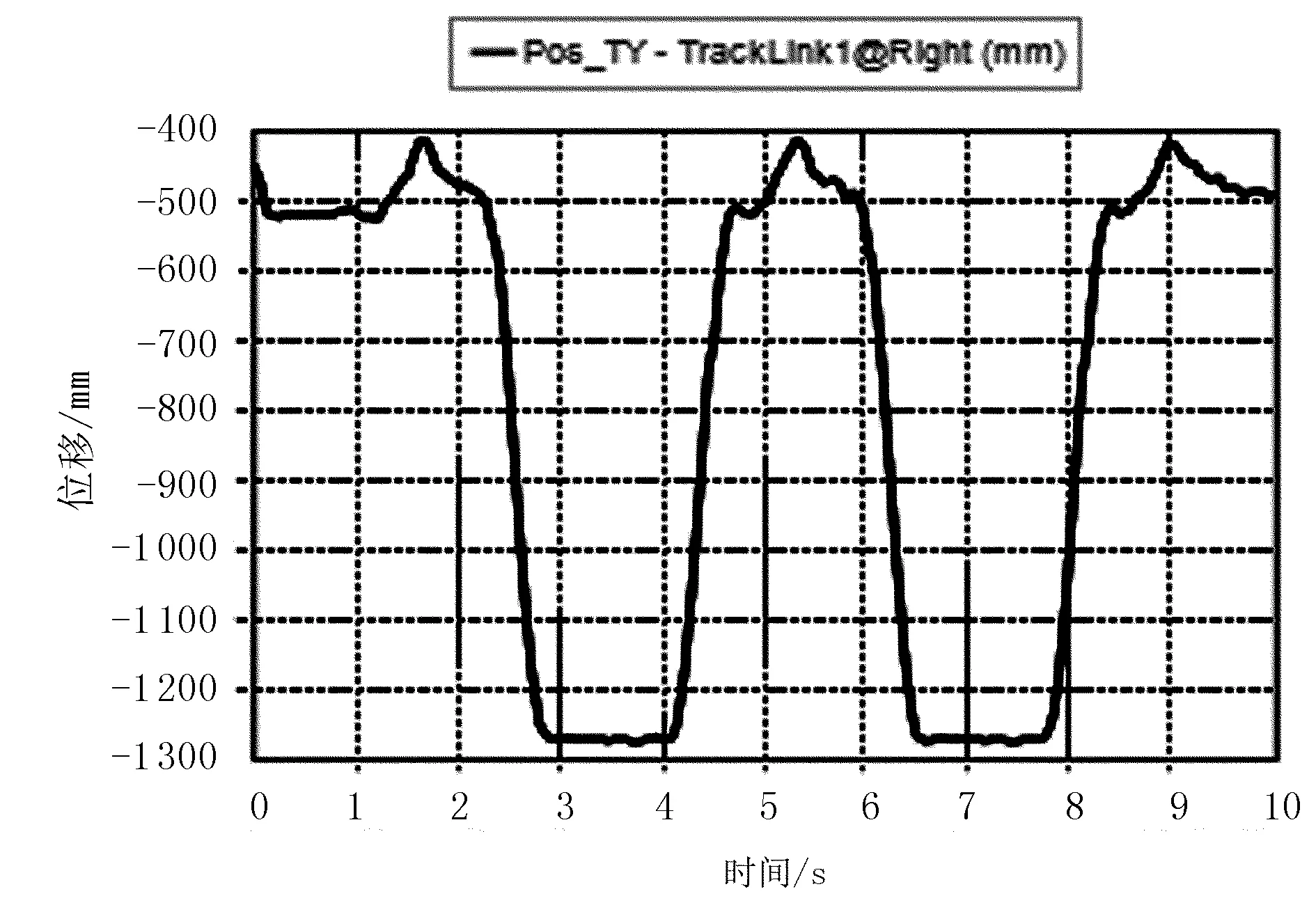
圖3 履帶板A的縱向位移Fig.3 Longitudinal displacement of tack linkA
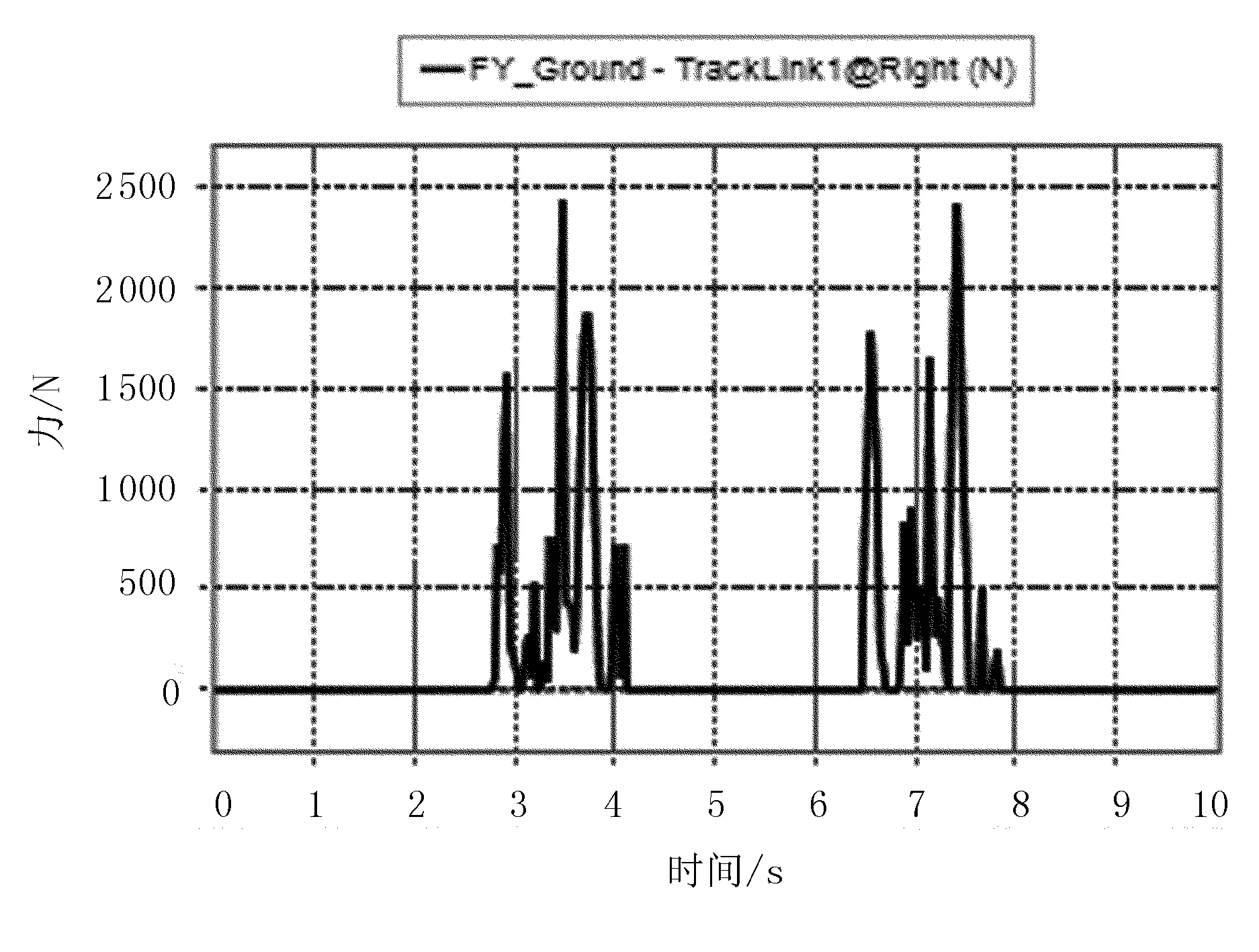
圖4 履帶板A與地面的應力變化Fig.4 Pressure changes of the tack linkA to ground
由圖3可以看出:在約1.6s時,曲線上升并達到運動過程的最高點,表明履帶板A已運動至托帶輪處;在1.6~3s時間段內,曲線開始陡然下降,表明履帶板A從導向輪上邊沿逐步開始下降;在3~4s時間段內,曲線平緩并處于最低峰,表明履帶板A到達最低點,與地面接觸,隨后履帶板A又沿著驅動輪上升,進入下一圈循環。由圖4可以看出:曲線有幾處明顯的波峰,首先第1處波峰的產生是由于履帶板A離開導向輪,被擠壓陷入土壤中,土壤對其形成的應力;最后一處波峰是驅動輪對其施加的力,中間幾處波峰是由于履帶板A受到支重輪的壓力造成的。
由勻速行駛時驅動輪上的驅動力大小來代表整車行走時行走裝置的總阻力大小[8],驅動輪上的驅動力矩如圖5所示。其中,在1.6s前為整車啟動的過程,這個過程需要加速,驅動力矩先逐漸增大后減小,最大值達到-2 044 277N·mm;由于啟動時要克服慣性阻力,因此驅動力矩較大,等作業車運動趨于平穩,驅動力矩又減小到某一值。在1.6s~9s時為果園作業車勻速行駛過程,需要的驅動力矩則較小,由此可以看出,履帶式果園作業車在加速啟動階段需要的動力遠大于勻速行駛時;當速度達到3km/h、勻速行駛7.5s過程中,整機受力均勻,運行平穩,驅動力矩曲線有規律的上下波動,引起這種情況的原因是鏈傳動的多邊形效應;從第9s開始,整機減速制動階段,驅動力矩先增大后減小,最大值達到1 415 033N·mm。由此可以看出,整機在加速啟動時動力需求相對較大。
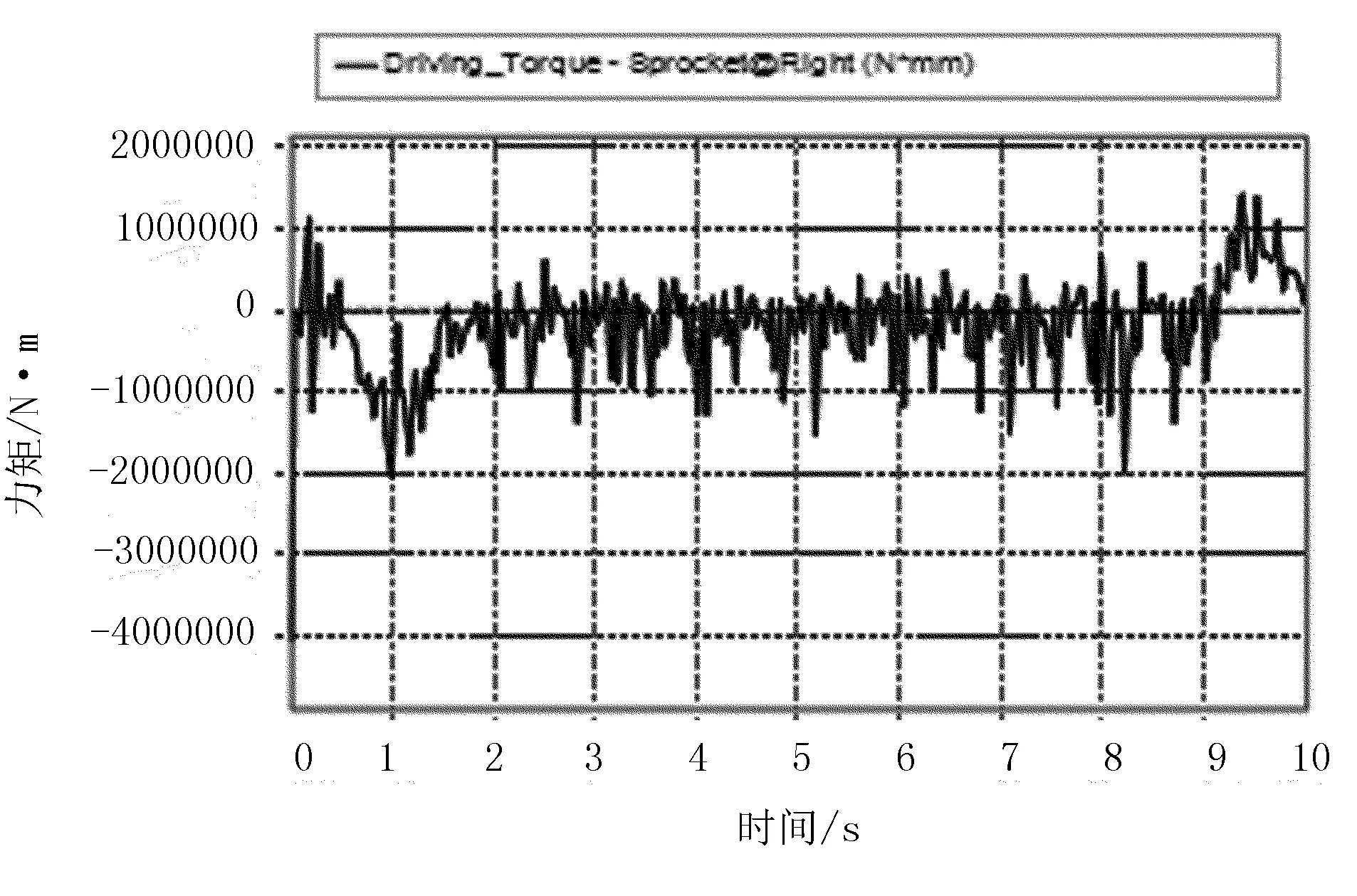
圖5 驅動力矩Fig.5 Driving torque
3.2 平地轉向工況分析
針對履帶作業車在田間作業時的平地轉向工況進行分析,所使用的主要轉向方式為差速轉向和抱死轉向,即一側履帶的驅動力增加或不變,而另一側履帶驅動力減小或制動,由此會產生一個轉向力矩。轉向的靈活性和操控性是履帶車輛機動能力的重要指標之一,研究其性能對其合理的使用具有重要意義[9]。對由平地環境轉向工況環境進行仿真前,應該選擇一個符合實際、滿足條件并且相對合理的行駛速度。圖6為不同車速下(1.2km/h和3.0km/h)轉向整機垂向位置的變化曲線,橫坐標代表時間,縱坐標代表整機質心位置。由圖6可以看出:行駛速度為1.2km/h時,質心的波動幅度較小。因此,在接下來的轉向工況仿真中采用速度1.2km/h進行仿真試驗。

圖6 不同車速下作業車的縱向位移Fig.6 Longitudinal displacement of overall unit at different velocity
轉向性能是表征車輛改變其運動方向的一種能力,主要通過最小轉向半徑、轉向角速度及轉向角加速度等指標評價。其中,轉向角速度是評價履帶車轉向性能的重要指標[10],如圖7所示。由圖7可知:履帶式果園作業車在差速轉向時的轉向角速度相對較小,波動變化小,均值約為0.15rad/s,說明履帶式作業車差速轉向的穩定性相對較好;而抱死轉向的轉向角速度較大,且波動也較大,均值約為0.36rad/s,說明履帶式作業車抱死轉向方式的穩定性相對較差。由此表明,差速轉向相較于抱死轉向更趨于平穩,但完成相同的轉向要求時差速轉向方式需要更大的轉向半徑,影響了作業車整機的機動性。

圖7 作業車輛轉向變化時角速度Fig.7 Steering angular velocity of overall
轉向角加速度是車輛轉向時側翻與否的重要指標,如圖8所示。轉向角加速度越大,則產生的離心力越大,車輛就越容易發生側翻。由圖8可知:車輛采用差速轉向方式時其轉向的角加速度相對較小,均值約為0.007rad/s2,而抱死轉向時其轉向角加速度相對較大,均值為0.068 rad/s2;差速轉向與抱死轉向角加速度曲線變化規律基本一致,但相較于抱死轉向方式,差速轉向方式的角加速度幅值波動較小,較易趨于穩定[11]。由此表明,作業車輛差速轉向方式比抱死轉向方式穩定性好;但不論哪種轉向方式,作業車內外側履帶會同時受到阻力,都是外側履帶克服的阻力較大、內側履帶克服的阻力較小。
根據仿真結果,履帶車樣機采用差速轉向的方式。

圖8 整機轉向角加速度Fig.8 Steering angle acceleration of overall unit
4 履帶式果園作業車直行和轉向試驗
4.1 平地直線行駛試驗
采用履帶車中心安裝滴水器滴水,沿水線每隔20cm擺放一個小模塊辦法來實現軌跡劃線,水線及小模塊寬度均小于10mm,測量誤差較小可以忽略。
選取坡度為0°的實驗場地,使作業車處于正常工作狀態,在現有路面條件下,以低擋、中擋、高擋直線行駛。由直線行駛軌跡(見圖9)可知:基于預設的驅動函數和控制系統控制下,車輛在行駛過程中軌跡偏差較小,最大偏差為0.08m,方差為0.000 78,說明履帶式作業車在控制系統控制下直線行駛度比較高。

圖9 整機直線行駛軌跡Fig.9 Track line of line running
4.2 平地轉向行駛試驗
根據履帶車工作需求試驗了180°轉向,在排除人為遙控操作情況下,試驗自設的轉向控制系統的轉向情況,如圖10所示。由圖10可以得出,履帶車自設轉向控制系統能夠實現180°的轉向。
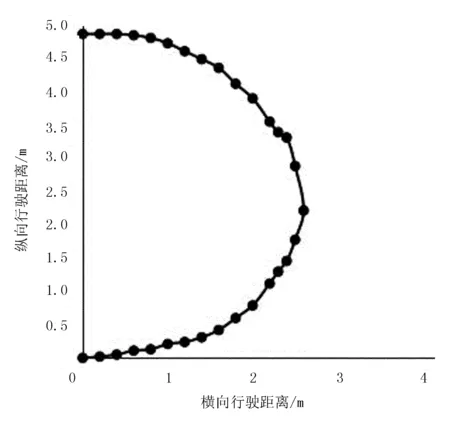
圖10 180°轉向行駛軌跡Fig.10 Transplanter track of marching 180°
5 結論
1)在平地直行工況下,仿真得出接地壓力、沉陷深度及驅動力矩曲線,分析可知整機在獲得驅動力時性能良好。
2)通過平地轉向工況下對其轉向性能進行動力學仿真實驗,分析轉向角速度與轉向角加速度曲線,結果表明:行駛速度越高,離心力越大,轉向時其穩定性就越差;抱死轉向相比差速轉向,其轉向阻力大,穩定性低,但轉向半徑較小,轉向較快。
3)履帶式果園作業車的平地直行和轉向試驗與仿真結果基本一致,從而驗證了整機模型的正確性,為履帶式果園作業車進一步改進設計提供了理論參考依據。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
