撫育機器人優化性設計—基于MatLab
2019-12-22 02:33:10秦麗娜
農機化研究 2019年6期
秦麗娜
(武漢商學院,武漢 430056)
0 引言
森林撫育是有效促進林木生長、提高林木產量及品質的有效措施之一。近年來,為加快我國森林業的發展,森林年輕苗種的撫育采伐逐年受到重視,用于森林撫育采伐的工具或設備整體性能水平亟待提高。為較好地提高工作效率與降低人工勞動強度,針對撫育機器人進行研究和開發勢在必行。動作的精準定位與撫育控制決定撫育機器人工作效率的高低,而本課題在移動撫育機器人動態數學模型及路徑規劃不同控制算法的基礎上,利用運動學結構分析及最優算法理論對撫育機器人的關鍵動作部件[1-2]進行優化設計。
1 動作部件優化設計模型
1.1 數學模型建立
進行撫育機器人動作部件的理論模型構建,首先要建立正確的運動坐標系(見圖1),并結合正逆運動學方程[3]之間的轉換機理(見圖2),求解矩陣,則
Ti=Rot(z,θi)Trans(0,0,di)Trans(αi,0,0)
Rot(x,θi)=
在忽略不可避免的剛性影響因素前提條件下,對撫育機器人的動作執行部件的動態模型進行簡化,則

(1)
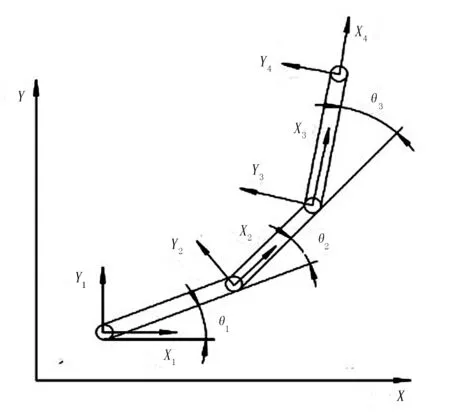
圖1 撫育機器人動作部件坐標系簡圖Fig.1 Coordinate system brief diagram of the moving parts of the tending robot

圖2 正逆運動學求解轉換關系簡圖Fig.2 Simple diagram of the solving and transform relationship between the forward and inverse kinematics
式中n—廣泛意義上的坐標系;
T—所建模型系統的動能;
Qi—廣泛意義上的作用力;
U—相關勢能函數變量;
D—相關耗散函數變量。
1.2 物理模型優化
撫育采伐機器人的工作過程:在駕駛控制室的識別檢測與控制指令發出后,撫育機器人通過連接傳遞的傳動部件,其動作部件如主臂、副臂及伸縮臂進行森林撫育作業。此過程中,各臂桿的結構與尺寸協調成為優化動作部件的核心。參照楊捷的基于MatLab平面機構分析與解析理論[4],利用繪圖軟件并根據機械機構的靜態運動學、動態運動學等原理確定關鍵參數[5],給出三維模型優化簡圖,如圖3所示。進行力學分析時,著重計算撫育機器人動作部件的作業速度、加速度及各臂桿所承受的慣性力與慣性力矩之間的聯系,同時應考慮避開臂系的個別部位應力集中等現象[6],確保整個撫育動作部件各關節之間連接準確牢固,撫育作業順暢高效。
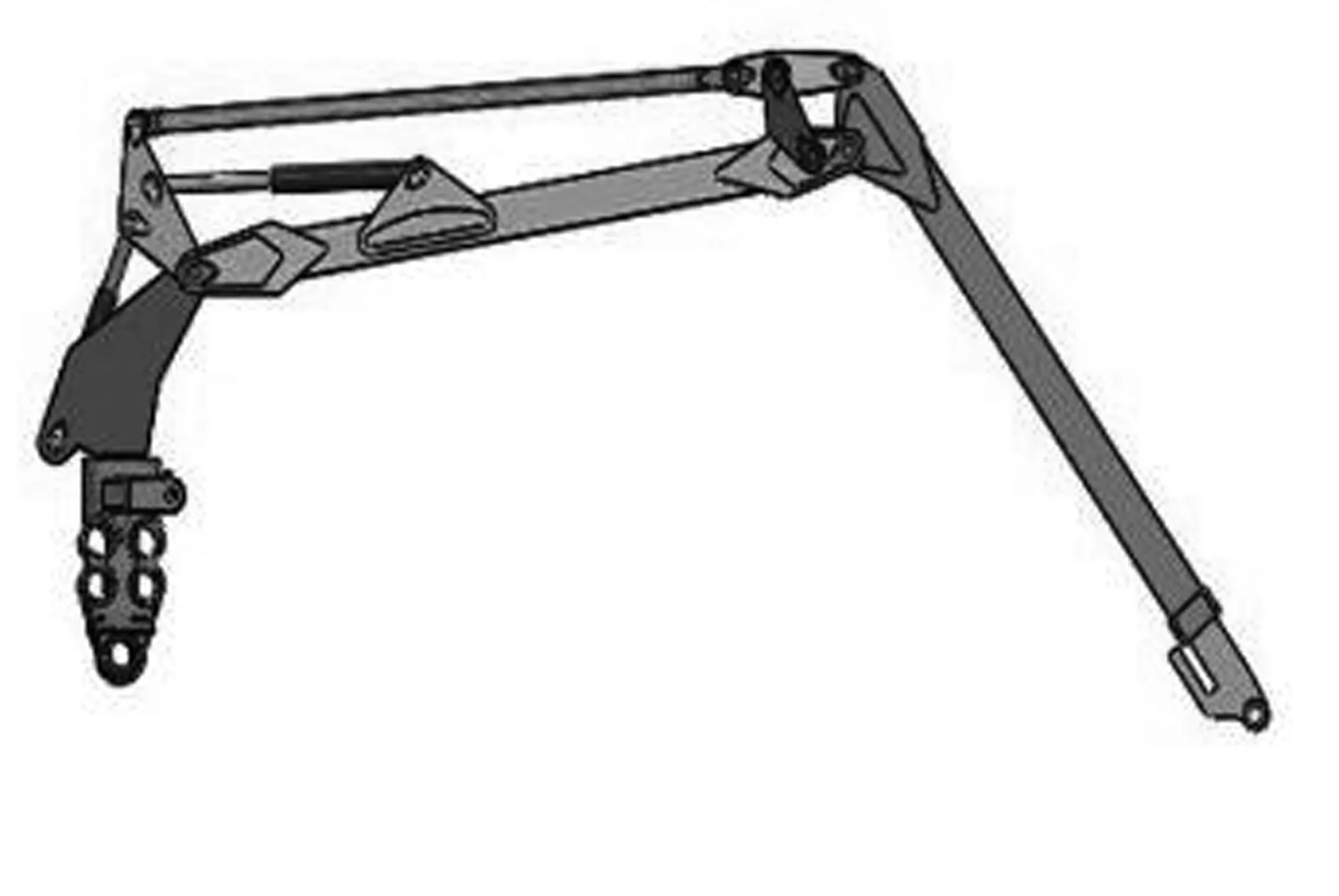
圖3 撫育機器人動作部件三維模型簡圖Fig.3 3D model brief diagram of the moving parts of the tending robot
2 基于MatLab參數優化
2.1 系統硬件設計
智能撫育機器人的硬件主要由識別對象裝置、傳遞感知及準確測量裝置和控制執行主體部件等組成。圖4為擬優化的撫育機器人動作部件結構框圖。在改進機械機構系統之后,對智能控制的硬件進行選型與匹配測試,并輸入相關軟件程序進行調試作業。

圖4 撫育機器人動作部件結構框圖Fig.4 The structure diagram of the moving parts of the tending robot
在PWM調控之下,通過對各閥門控制的優化得出動作終端執行部件伺服馬達的相關參數設置,如表1所示。結合CAN總線及上位機的功能,在控制電路的環境之下,基于MatLab[7],利用最小二乘法建立目標函數及給定約束條件,對各比例控制閥、轉向控制閥等進行替換,以期達到最佳動作效果。

表1 撫育機器人動作終端執行部件參數設置表Table 1 The parameter setting table of the moving terminal execution part of the tending robot
2.2 系統軟件程序設定
針對撫育作業環節的系統控制程序,在神經網絡控制算法的基礎上采用優化獎懲函數思想,選取RBF性能指標函數,對機械壁精細控制調節,并在其指導下執行動作,則
撫育機器人機械臂的運動控制算法流程簡圖,如圖5所示。通過將預設目標位置與實際撫育作業動作部件的工作位置進行對比判別,進而執行不同的控制指令,達到智能調控目標。
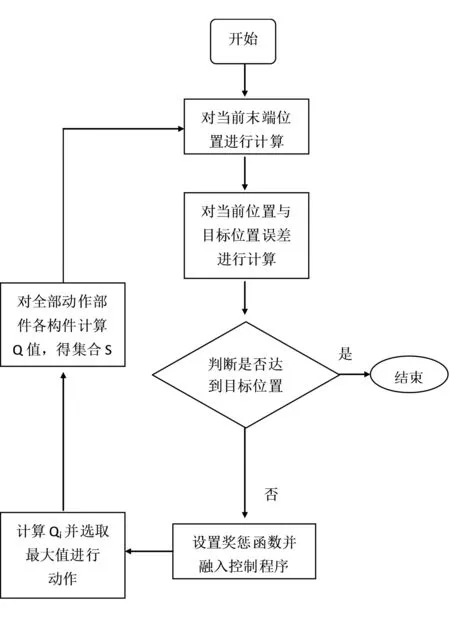
圖5 撫育機器人動作控制算法流程圖Fig.5 The flow chart of the moving control algorithm of the tending robot
同時,進行加權矩陣調節,融入自適應規律,使得控制更加精準化、高效化。其核心加權函數矩陣為

撫育機器人的動作部件主要執行立木、修整、伐木、運輸及堆放等。根據其作業林地的直線、弧線與自主識別路徑規劃與避障[8]及機器人在行進工作中的平穩性條件[9],將所建仿真模型相關參數及數據輸入MatLab,根據其專業仿真及計算功能,對各個作業環節進行系統軟件化程序設置。部分程序段編寫如下:
#include < Servo.h >
Servo servo1, servo2,
servo3, servo4;
int val1,val2,i,j,pos,
sensor1=1,sensor2=2;
void setup()
{
servo1.attach(5);
servo2.attach(2);
…
pinMode( sensor1,OUTPUT);
serial.begin(115200);
}
Void loop()
{
servol.write(80);
…
i=analogRead( sensor1);
val1=(6950/(i-3))-4;
if(val1==12)
{
for(pos=80;pos<=114;pos+=1)
{
servo1.write(pos);
delay(30);
…
}
…
3 動作部件試驗仿真
在MatLab軟件環境下利用Robotics Toolbox進行動作部件試驗仿真[10],進行最優值求解前將前提條件與關鍵參數值按照仿真要求設置完畢,力求與森林實地作業環境相似及給定撫育作業要求相同;針對動作部件的運動角度進行輸出數據記錄,通過將核心算法[11-14]與運動學求解互補,有效避免求解過程中的奇異點現象,可以整體把握仿真效果,提高運算速度。由圖6可以看出:動作參數θ3的試驗值與期望設計值吻合較好。

圖6 動作部件θ3試驗與期望值輸出效果對比Fig.6 The output effect comparison between the testing and the expected values of the moving pact θ3
試驗仿真過程中,對動作部件進行實時軌跡跟蹤,繪制軌跡跟蹤的對比圖。在給定路徑運作時,仿真模型可做到準確化執行。由圖7可以看出:在初期動作部件執行動作存在一定的機械誤差,不影響整體對比;后期兩者具有較強的吻合性,誤差范圍控制在5%左右,驗證了優化部件的可行性。
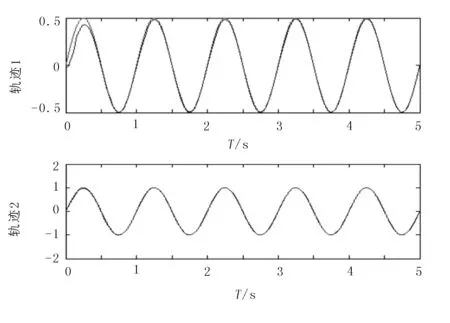
圖7 撫育機器人動作部件仿真軌跡跟蹤對比圖Fig.7 The contrast figures of simulation trajectory tracking about the moving parts of the tending robot
4 結論
1)通過分析撫育機器人動作部件的作業原理、構件組成及各關節間的銜接條件,建立關鍵部件機械臂的三維仿真模型,并將機械臂控制的硬件如伺服馬達等進行參數優化。在傳感控制及識別技術的基礎上,借助于控制核心算法、獎懲函數及MatLab工具等完成動作部件的仿真運行,并驗證各環節優化的合理性與仿真的可靠性。
2)此優化撫育機器人的方法對森林撫育設備的其他控制部件改善有一定的借鑒作用,可對森林撫育機器人的運動軌跡規劃與智能準確控制提供發展方向和理論應用基礎。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
