單驅雙夾式草莓末端執行器設計
2019-12-22 02:31:04徐瑞峰馮青春趙春江
農機化研究 2019年6期
關鍵詞:測量
張 曼,徐瑞峰,馮青春,王 秀,趙春江
(1.西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100;2.北京農業智能裝備工程技術研究中心,北京 100097;3.農業部農業信息技術重點實驗室,北京 100081;4.農業智能裝備技術北京市重點實驗室,北京 100097)
0 引言
草莓(strawberry)因其味道鮮美、營養價值豐富、經濟效益高,在我國乃至世界各地都被大量種植。目前,草莓采摘主要依賴人工,收獲季節作業量大,勞動強度高,加上幾年來農村勞動力大量流失,導致草莓采摘環節作業量占草莓各生產環節成作業量的40%左右[1]。所以,機械化采摘技術成為現階段重點研究課題之一。作為直接和草莓果實接觸的部分,末端執行器的研究顯得尤為重要。
日本近藤直等人設計的高架栽培草莓采摘機器人[2-4]采用真空吸引、螺旋切割器切斷果柄的方式進行采摘;真空吸附方式采摘,對采摘定位精度要求較低,但容易造成果實損傷。通過對果柄采摘點進行定位,以夾持和切斷果柄,是目前草莓自動采摘的主要方式[5],剪切方式包括機械切刀和電熱切割兩類。目前,草莓采摘末端執行器存在結構冗余、控制復雜及通用性差的問題[6]。
本文針對目前草莓機械采摘結構復雜、成本高及易對草莓產生機械損傷等問題,通過測量分析草莓果實和果柄的相關參數,設計了一種單驅雙夾式草莓末端執行器,并對其結構參數進行了優化。
1 末端執行器整體方案設計
1.1 方案選擇
末端執行器的工作是將果實與果柄分離,實現分離通常采用兩種方式,即切斷果梗和扭斷果梗。其中,扭斷果柄需要對果實進行抓取并施加一定的力,所以該方式適合用于一些形狀規則、硬度較高且富有彈性的水果采摘作業中,如橙子、柚子等。成熟的草莓果實外形不規則,表皮易損,高架栽培的草莓成熟后基本處于懸空狀態,遮擋少且果柄軟長,為避免對草莓產生的機械損傷,本末端執行器采用剪斷果柄的采摘方式。為實現對采摘下的果實進行收集,采用“單驅雙夾”的結構,實現單氣缸對果柄剪切和夾持機構的同步驅動,滿足采摘和收集要求的同時使機械結構更加簡單和緊湊。
1.2 虛擬樣機模型
溫室內高架栽培的草莓成熟后自然垂落在栽培槽外側,莖葉對果實遮擋少,適合剪斷果柄的末端執行器作業[7]。末端執行器主要由剪刀、果柄夾持塊、連桿和氣缸組成,如圖1所示。
剪刀由下方安裝果柄夾持塊的定刀和動刀組成,動刀通過連桿、Y型接頭和氣缸的活塞連接,定刀上加工限位孔限制動刀張開閉合角度。工作過程如下:視覺系統工作時氣缸處于伸出狀態,剪刀張開;當視覺系統獲得采摘點坐標后,末端執行器隨機械臂運動到采摘點,氣缸收縮,帶動Y型接頭、連桿和動刀運動,切斷果柄;由于“單驅雙夾”的結構,在剪刀剪斷果柄的同時,定刀和動刀下方的果柄夾持塊穩定的夾持住果柄,隨機械臂運動到果實收集筐上方預定位置氣缸伸出,放下果實,機械臂復位,準備下一次采摘。
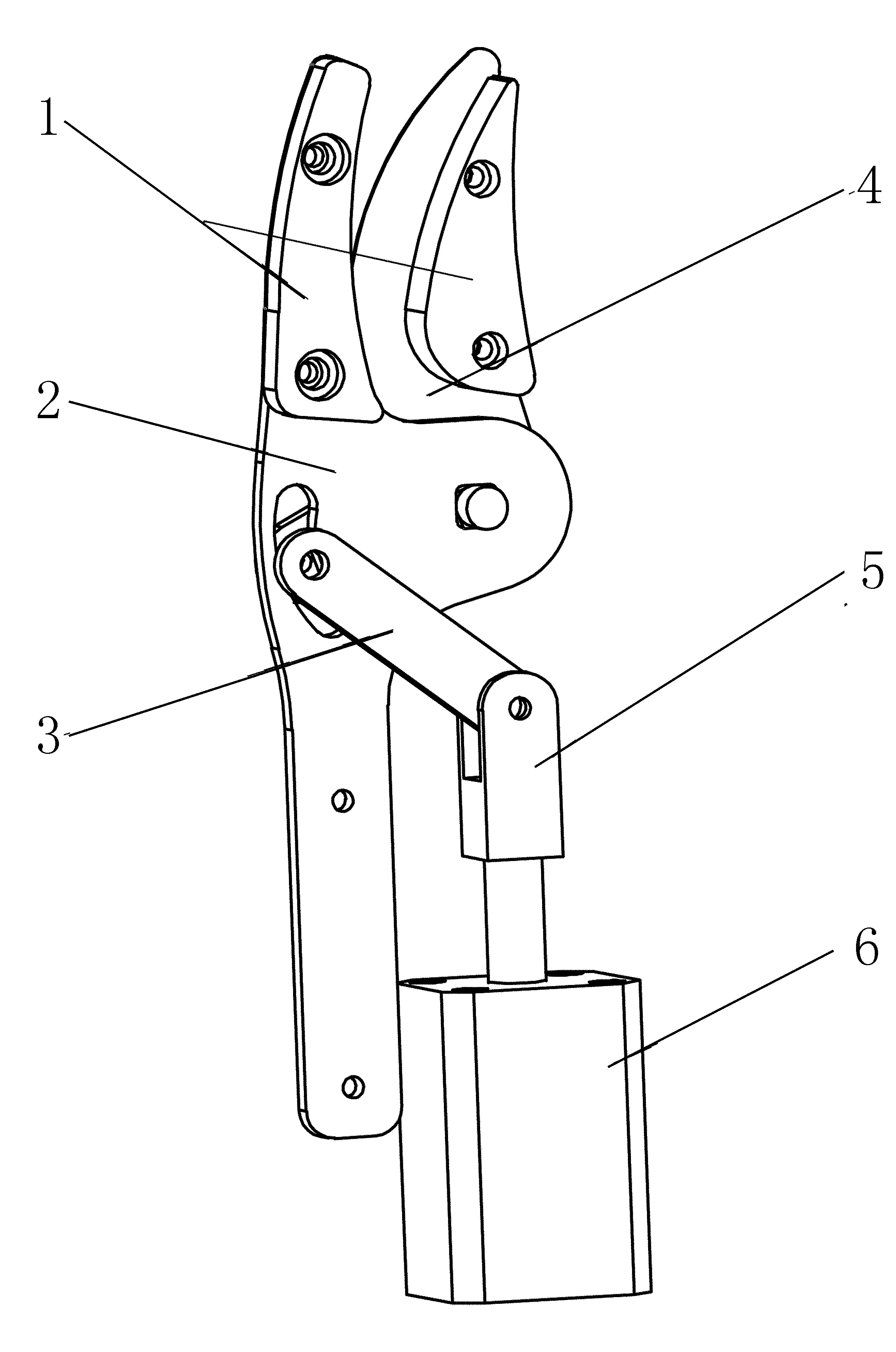
1.夾持塊 2.定刀 3.連桿 4.動刀 5.Y型連接頭 6.氣缸
2 草莓采摘末端執行器關鍵部件設計
2.1 草莓采摘力學參數測量
末端執行器是直接接觸果實的部件,所以目標果實的相關參數在末端執行器的設計中起到關鍵作用。在采摘機器人采摘過程中,由于末端執行器設計失誤而導致采摘失敗的情況時有發生,如由于剪切力不夠不能完成剪切甚至對植株產生拉扯、抓取和夾持力過大損傷果實、抓取和夾持不穩定使果實掉落等[8],所以測量果實相關物理參數對末端執行器的設計具有重大意義。本文以北京市昌平區特菜大觀園草莓采摘棚中“圣誕紅”品種高架栽培草莓果實為研究對象,通過對其采摘力學參數的測量分析,為末端執行器的設計提供理論依據。
2.1.1 果實生長特性分析
果實生長特性是指草莓成熟后垂落在栽培槽兩側,自然條件下相鄰果實之間的距離。果實分布距離對剪刀張開角度的確定至關重要。
隨意選取一架草莓,通過直尺測量相鄰成熟果實距離并記錄。測量結果顯示:相鄰成熟草莓距離大部分分布在2.5~6cm之間,為典型高架栽培草莓分布,如圖2(a)、(b)所示;另外,存在部分草莓成熟后未能下垂至栽培架兩側,如圖2(c)所示;部分草莓生長畸形,導致和相鄰果實接觸,如圖2(d)所示。
2.1.2 果實形態參數測量
果實形態參數主要指果柄直徑和果實質量等參數。直徑的測量主要針對的是草莓果實果萼上方1.5~2.5cm處的果柄。因為此長度既為末端執行器對采摘下來的果實進行夾持留下空間,也避免果實收集過程中果柄對果實的損傷。實驗材料為隨機選取的30個成熟的草莓果實,實驗設備為游標卡尺及電子秤。草莓采摘下時用游標卡尺測量果柄直徑,隨后人工在測量處采摘進行其他形態參數的測量,包括橫向直徑、縱向直徑及質量。除質量外,每個尺寸分別從3個不同方向測量3次,計算平均值作為測量結果。
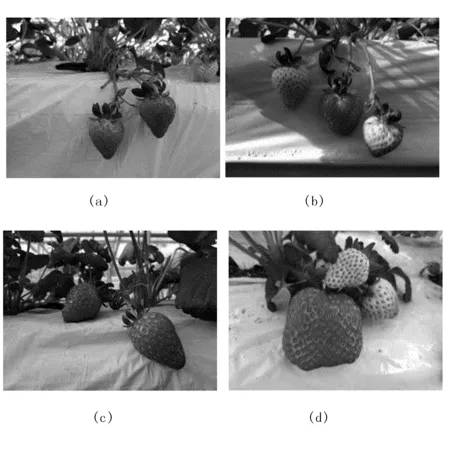
圖2 草莓生長特征圖Fig.2 Strawberry growth characteristics
將測量結果整理并進行分析,得到草莓物理參數如表1所示。由表1可知:“圣誕紅”品種草莓果柄粗壯,果實較大,形狀較規則。
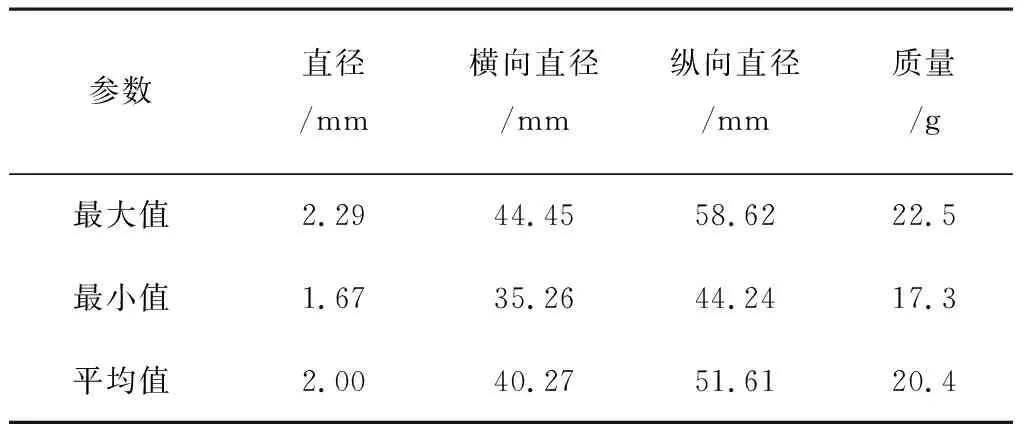
表1 果實形態參數Table 1 Fruit shape parameters
2.1.3 果柄力學參數測量
草莓果柄力學參數主要包括剪切力和抗擠壓力測量,主要為剪切機構及夾持機構設計提供理論依據。果柄剪切力測量同樣針對草莓果實果萼上方1.5~2.5cm處果柄,抗擠壓力針對剪切下來的靠近果實部分的果柄。實驗材料30個采摘時間小于2h且帶柄長度大于2.5cm的新鮮果實。實驗設備為MTS微控電子萬能試驗機,力傳感器量程選擇0~100N,實驗速度設定為50mm/s和1mm/s。
實驗分為兩部分,第1部分進行剪切力實驗。將30個草莓平均分為兩組:一組做單刃剪切試驗,另一組做雙刃剪切力試驗。由于兩組試驗草莓樣本不同,果柄直徑也不同,在剪切實驗之前測量并記錄待剪切果柄處直徑,隨后進行剪切試驗,分別記錄剪切力數值如表2所示。
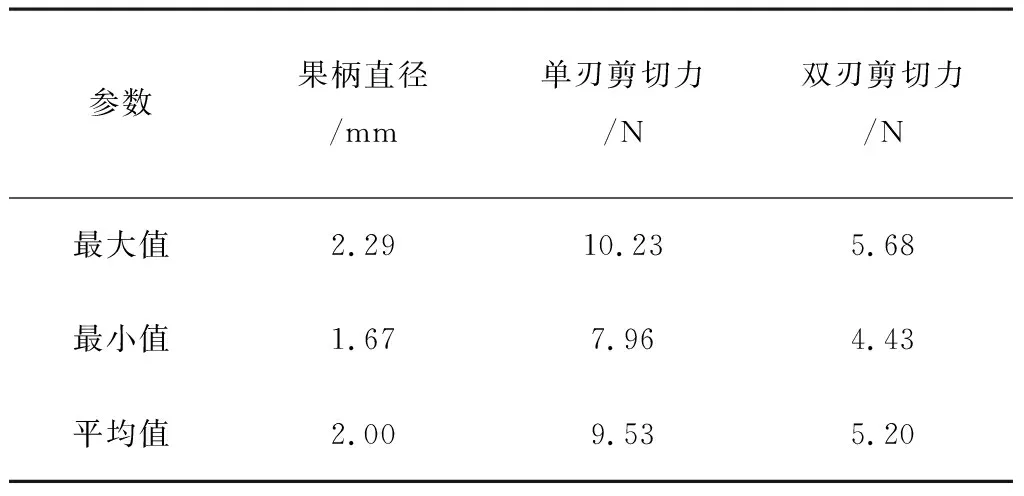
表2 果柄剪切力試驗Table 2 Cutting force test of stems
實驗結果按照剪切力(N)與果柄直徑(mm)的比來表示,比值越小說明越省力。雙刃的剪切力與果柄直徑比約為單刃的1倍,結果如圖3所示。
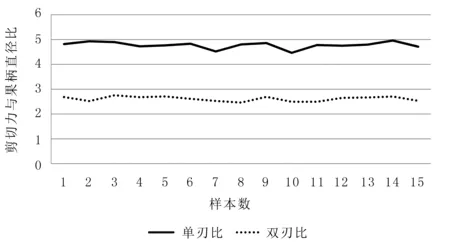
圖3 單雙刃剪切力比較Fig.3 Comparison of Single and double edge shear force
第2部分試驗室果柄抗擠壓試驗。將30份樣本平均分為3組,分別進行橡膠、硅膠和不銹鋼的擠壓實驗。實驗中,在萬能實驗機兩夾具上安裝2mm厚的3種材料,分別記錄果柄樣本直徑和對應剛好夾持住時萬能試驗機兩夾具的距離。
實驗結果顯示:3種材料中,相同情況下,夾具距離從小到大依次是硅膠、橡膠、不銹鋼。其中,采用硅膠材料時,剛好夾住果柄到果柄被夾爛的夾具距離范圍是4.47~4.82mm。
2.2 關鍵部件設計
根據上節對草莓各項采摘力學參數進行測量與分析,本節運用SolidWorks和 CAD軟件對草莓末端執行器的進行設計。
2.2.1 剪切部分結構參數設計
剪切部分結構參數設計主要是定刀和動刀的設計,動刀由氣缸帶動運動,定刀固定于機械臂末端,通過限位孔對動刀運動范圍進行限制。
根據針對草莓果實、果柄各項相關物理參數測量,確定末端執行器采取雙刃剪切,定刀與動刀完全張開時剪刀尖端距離為40mm。當剪刀尖端距離為40mm、動刀旋轉角度為45°時,確定剪刀其他參數:剪刀張開時,整體尺寸為150mm×60mm;閉合時,尺寸為為150mm×44mm。定刀和動刀上分別留有兩個M3螺紋孔,用來安裝夾持塊。另外,定刀刀柄上留有兩個M3螺紋孔用來定位及安裝。剪切部分二維尺寸圖如圖4所示。
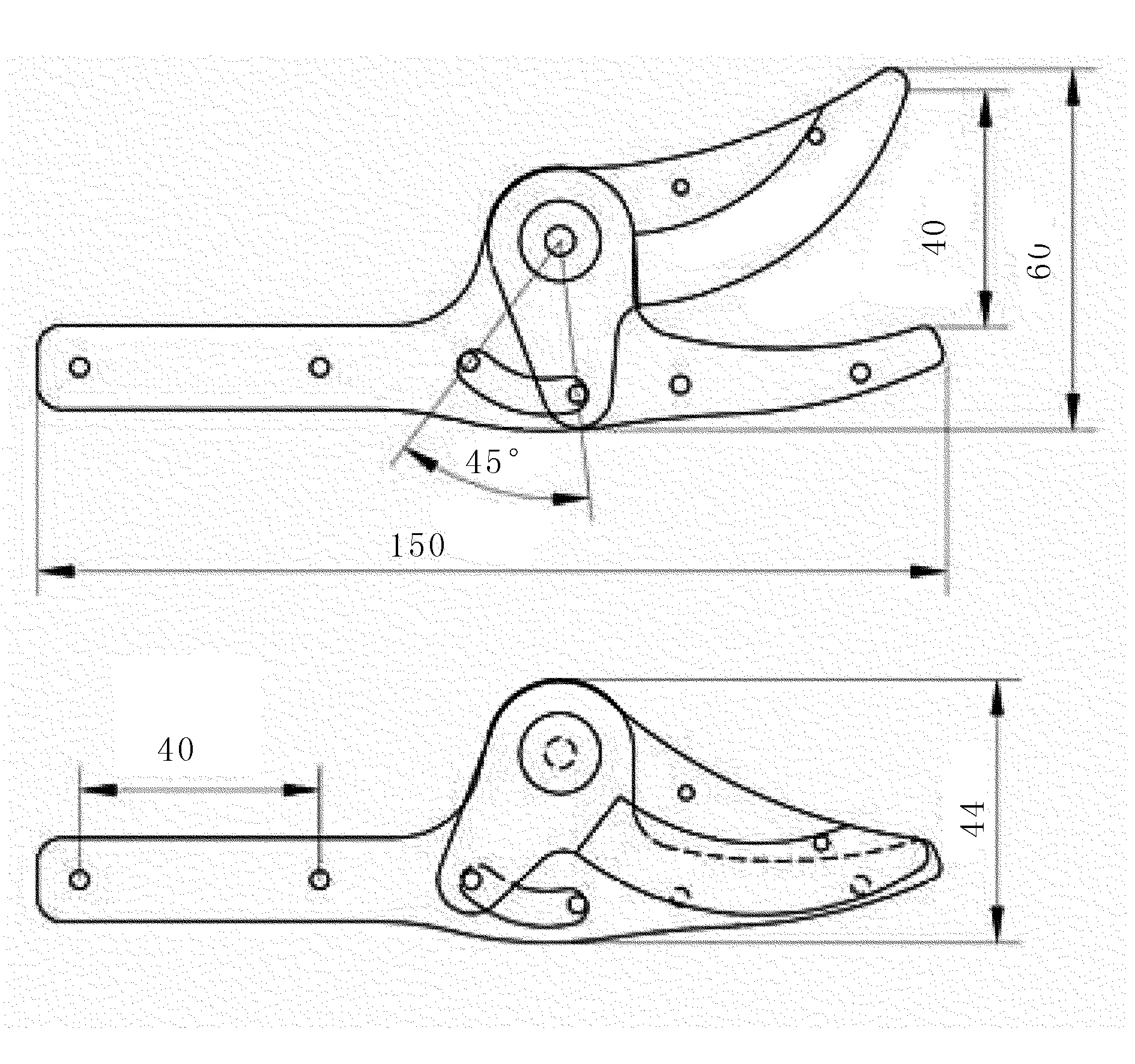
圖4 剪切部分二維尺寸圖Fig.4 2D dimension drawing of Cut part
2.2.2 驅動部件參數設計
該末端執行器采用氣缸驅動,所以氣缸型號的選擇至關重要。根據曲柄滑塊機構設計原理和定刀結構(見如圖5),分別以定刀限位孔兩極限位置畫直徑相同的圓,該圓直徑即為連桿長度;然后,在定刀左側沿刀柄方向作1條直線與兩圓相交,兩交點之間的距離即為氣缸的行程,同時兩點也是連桿與氣缸鏈接端的兩個極限位置。
參考氣缸外形尺寸和剪刀結構的緊湊性,不斷嘗試改正連桿與氣缸行程兩項參數,最后確定連桿長度為35mm,氣缸行程為25mm,此時末端執行器能完成剪刀動刀的完全張開和閉合。
根據氣缸行程為25mm,選擇SMC公司生產的型號為CQ2A16-25DM(缸徑16mm,行程25mm)雙作用氣動緊湊型氣缸,外形尺寸為29mm×29mm×22mm(氣缸收縮時),活塞桿外螺紋位M6×1.0,固定氣缸的螺紋為M4;配套連接件選擇型號為F-M6X100Y的Y型接頭,外形尺寸位12mm×16mm×32mm;連桿長度為35mm。
剪切部件和驅動部件之間通過固定桿和固定板按照設計參數進行加工并定位安裝,如圖6所示。
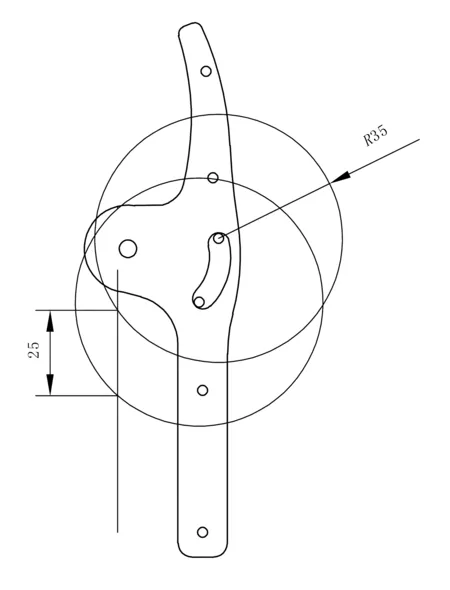
圖5 驅動部件設計示意圖Fig.5 Device of Drive part design

圖6 剪切部件和驅動部件關系Fig.6 Relative position of Drive and cut part
考慮美觀及安全等因素,將末端執行器封裝,整體外形尺寸為54mm×54mm×190mm,結構簡單,結構緊湊,無干涉等問題。實物圖如圖7所示。
2.2.3 夾持部件參數設計
單驅雙夾是指在剪切部件在剪斷果柄時需要同時夾持住連接果實的果柄,分別按照剪切部件的定刀和動刀輪廓設計塑料材質的夾持塊,安裝于定刀和動刀下方預留的螺紋孔上。根據果柄抗擠壓試驗結論,當動刀閉合時兩夾持塊預留用來粘貼厚度為2mm的硅膠墊的間距。由于草莓果柄既細又軟,硅膠材質的摩擦力大且柔軟,用來夾持果柄不僅可以保障夾持穩定性,也能減少對果柄的機械損傷。兩夾持塊間距取4.8mm。

圖7 末端執行器實物圖Fig.7 Physical map of End effector
3 設計參數校核與試驗驗證
3.1 剪切校核
對連桿和剪切部件組成的力系簡化并進行受力分析,如圖8所示。
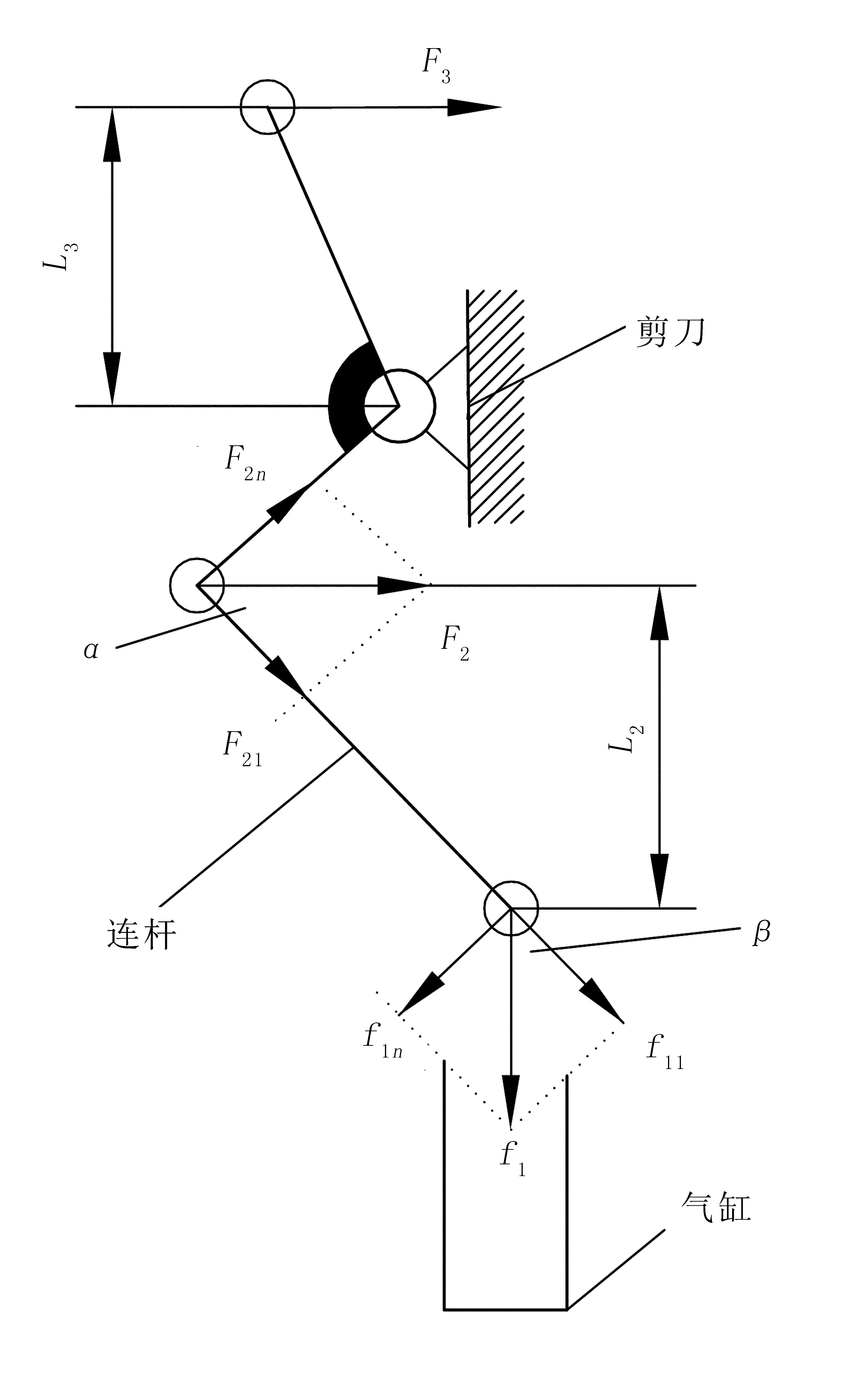
圖8 剪切部件受力示意圖Fig.8 force of Cut part
根據同一桿件上合力為0、合力偶為0,可列出如下平衡方程,即
F3L3=F2L2
F2cosα=F1l
F1=F1l/cosβ
式中P—氣體壓力,取P=0.5MPa;
D—氣缸直徑;
d—活塞桿直徑。
根據末端執行器結構參數可獲得α、β、L2和L3,分別帶入以上公式,效率取0.85,得F3≈64N。由于64N大于試驗所得果柄雙刃剪切力的最大值5.68N,所以該末端執行器可以剪斷草莓果柄。
3.2 夾持校核
利用硅膠墊進行對果柄夾取,首先要計算出草莓果柄會被夾住的兩硅膠墊之間的最小距離[9]。假設果柄在被橡膠墊夾取時不會產生形變,則對1個硅膠墊而言,形變量計算公式為
式中F—單個硅膠墊所受壓力,即草莓果柄所受擠壓力(N) ;
L—硅膠墊原始厚度(m) ;
A—硅膠墊擠壓面橫截面積(m2) ;
E—硅膠墊彈性模量(N/m2) 。
要保證草莓果柄被夾持塊夾住而不掉落,則草莓重力G要滿足
G≤μF
式中μ—硅膠墊與果柄之間的滑動摩擦因數;
G—草莓果實的重力(N) 。
綜上所述,聯立兩式得到
已知硅膠彈性模量E= 105N/m2,摩擦因數μ= 0.15,硅膠墊厚度2mm,草莓果實平均質量20.4g,草莓果柄平均直徑為2mm,則
即1個硅膠墊所需形變量為0.65mm,那么兩個硅膠墊就需要1.3mm 形變量,所以最終兩硅膠墊間距為D= 0.7mm;加上兩硅膠墊總厚度4mm,所以兩夾持塊間距為4.7mm。滿足試驗結論,可以對草莓果柄進行穩定夾持。
4 結論
針對草莓自動化采收需要,設計了一種氣動單驅雙夾的采摘末端執行器,并測量分析了“圣誕紅”草莓采摘力學參數,優化設計了末端執行器各部件參數。在此基礎上,對末端執行器果柄夾持和剪切性能進行力學模型驗證,以確保采摘執行可靠。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
