麥冬振動篩選機的多目標優化設計與試驗
2019-12-22 02:31:08孫付春李曉曉
農機化研究 2019年6期
孫付春,張 建,2,楊 濤,李曉曉
(1.成都大學 機械工程學院,成都 610106;2.成都農業科技職業學院,成都 611130)
0 引言
麥冬具有養陰生津、潤肺清心的功效[1],保存前會進行烘干處理。大小不一的麥冬混在一起烘干會導致部分麥冬烘干不徹底引起霉變,或者顆粒小的麥冬過于烘干影響麥冬的藥用價值,所以烘干前會對麥冬進行篩選。振動篩是通過篩面將粒徑大小不同的混合物料按粒度進行分級、篩分的機械設備,通過施加于篩體的振動,使物料松散、分層、透篩并同時輸送物料,從而達到物料分級、篩分的目的。振動篩已經被廣泛應用于農機、選煤、選礦、冶金、石油、化工、建筑、糧食和飼料等領域[2]。篩分質量和效率是振動篩分機械最重要的性能指標。由于麥冬產地集中于四川、福建、浙江三地,產地集中導致國內企業對麥冬篩選機的研究不夠有針對性,市場上的篩選機篩選效率普遍較低。
國內外振動篩按設備的運動方式主要分為以下兩類:一類是帶轉子型激振器的振動篩[3],工作原理是通過機架上的電動機帶傳動驅動偏心機構產生激振力,再通過彈性連桿驅動平衡體作強迫振動,通過擺桿帶動工作槽體產生相反方向的振動,從而達到篩分物料的目的。帶轉子型激振器的振動篩的篩面振幅和速度都比較小,且為恒值,通常為 4~8mm。物料在整個篩面上厚度不均勻,會出現篩孔阻塞現象。尤其在入料端,由于透篩環境差,使得篩分效果差,易引起共振,使振動篩分不穩定[4]。另一類是不帶轉子型激振器的連桿式振動篩,主要有動定振動篩、平面振動篩和搖動篩3類。其篩面的運動方式為平面運動[5],且篩面運動既有上、下移動量,又有左、右擺動量,但運動軌跡均為平面曲線,振動強度也不大,物料層從入料口到出料口過程中,整個篩面上的物料厚度也不均勾;但適應于小部分物料的干法篩分,對潮濕性物料堵孔現象比較嚴重。
目前,在農業物料篩分作業中,所使用的都是傳統的振動篩,即第2種沒有帶轉子型激振器的振動篩,采用的是平面連桿機構驅動,篩面工作時往復擺動,其運動軌跡一般為直線、圓或橢圓[6]。該類往復式振動篩的運動軌跡單一,較厚的物料層堆積在篩面上時難以快速有效篩分物料,同時物料在篩分過程中容易相互擠壓形成“粘連”,導致堵塞篩孔,進而會擾亂物料的透篩,從而使振動篩的篩分效率受到極大的限制。采用新的篩選技術、新型篩選機或者對篩選機進行結構優化是目前提高篩選效率的通用手段,但對篩選機進行結構優化來改善篩選性能是當前最具可行性的方式之一。
1 麥冬直線篩選機的功能分析和總體設計
根據麥冬篩選機的功能要求,前期結構設計應當遵循非標準機械設計總體設計原則[7],麥冬振動篩選機主要由電動機、支撐裝置、篩箱及凸輪機構等組成,如圖1所示。其中,凸輪機構通過連桿與篩箱相連,篩箱通過左右兩組連板懸掛在支撐裝置上;篩箱內部的篩板共有3層,每層篩板上均布有篩孔,篩孔大小根據麥冬大小從上到下依次為?8、?5.6、?3.6mm,篩選好的麥冬會從對應的出料口漏出。工作時,電動機通過皮帶帶動帶輪,帶輪帶動凸輪機構做往復擺動,篩箱根據凸輪機構的運動狀態進行擺動,整個篩選機構和工作原理等同于一個凸輪搖桿機構。篩選機構工作機構簡圖如圖3所示。
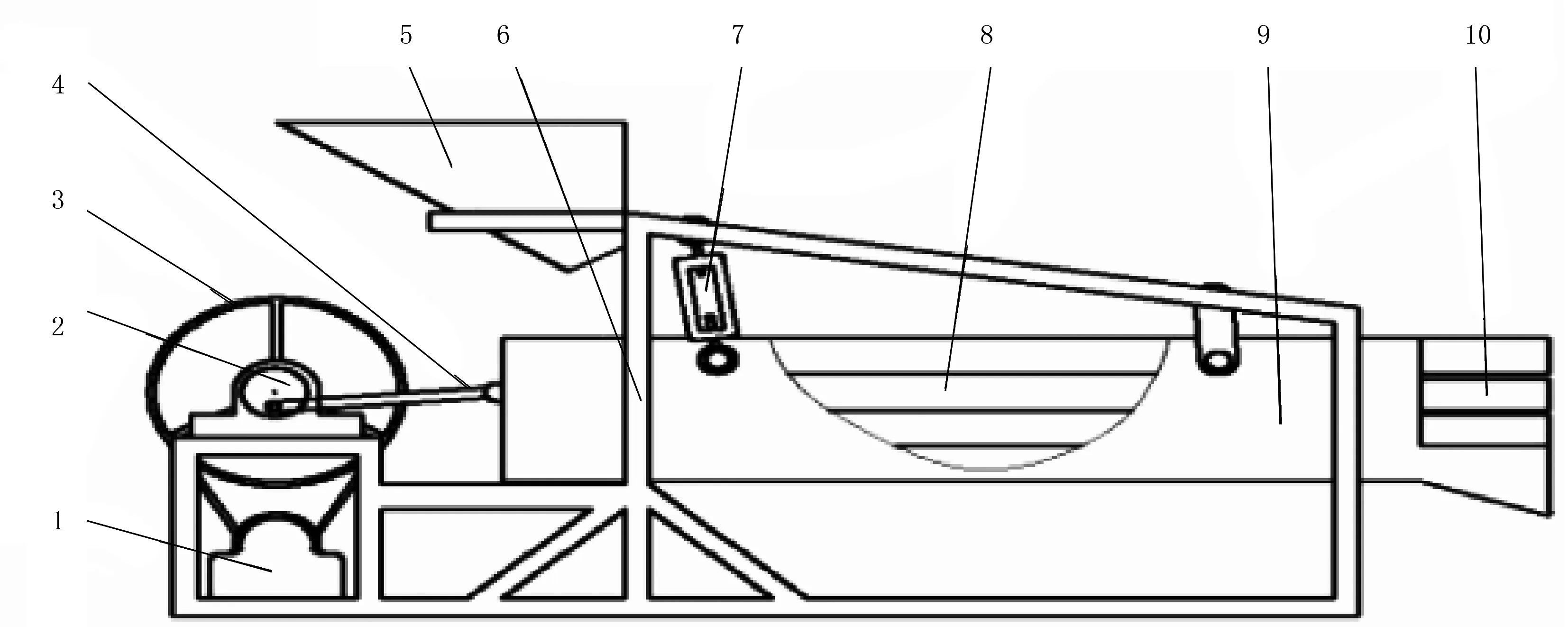
1.電動機 2.凸輪機構 3.帶輪 4.連桿 5.入料口 6.支撐裝置 7.連板 8.三層篩板 9.篩箱 10.出料口
2 篩選機構的優化設計
麥冬振動篩選運動的機構簡圖如圖2所示。由圖2可以看出:麥冬振動篩選機的篩選機構為典型的凸輪機構,凸輪機構經過高副低代后的麥冬振動篩選運動機構為一四桿機構,確切的說為一曲柄搖桿機構。此時,凸輪轉化成曲柄,篩箱看做連桿BC,曲柄連桿機構振動篩的工作原理如圖3所示。工作時,電動機驅動曲柄AB逆時針轉動,曲柄AB帶動連桿BC運動,連桿BC驅動搖桿CD運動。整個過程中,連桿BC做平面運動(即篩箱做平面運動),實現麥冬的篩選。在曲柄搖桿機構中,傳動性能是其想要實現的主要目標,具體要求就是機構的最小傳動角γmin最大,行程速比系數Κ也最大,而從節省材料的角度上要求總體尺寸盡可能小[8]。根據以上原則要求,在設定了搖桿最大擺角ψ的情況下,結合各約束因素,采取多目標函優化方法,尋優目標為最小傳動角γmin和行程速比系數Κ最大,而總體尺寸最小,對麥冬振動篩選機構進行優化設計。
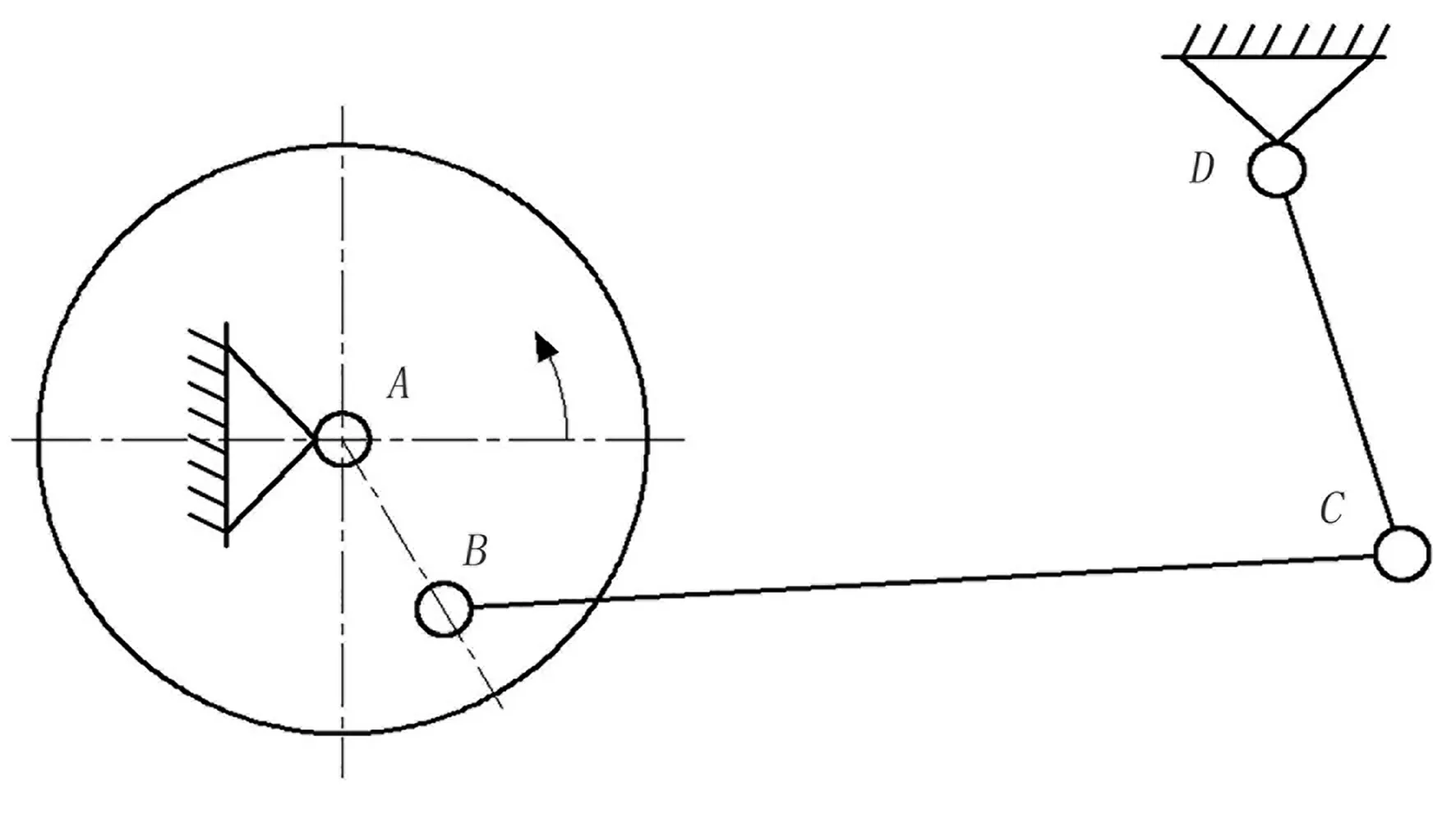
圖2 麥冬振動篩選機運動機構簡圖Fig.2 Motion mechanism diagram of ophiopogon japonicus vibration screening machine
2.1 最小傳動角的確定
高副低代后的麥冬振動篩選機構運動簡圖如圖3所示。由圖3可知,振動機構的最小傳動角γmin出現在主動曲柄與機架兩個共線的位置之一。
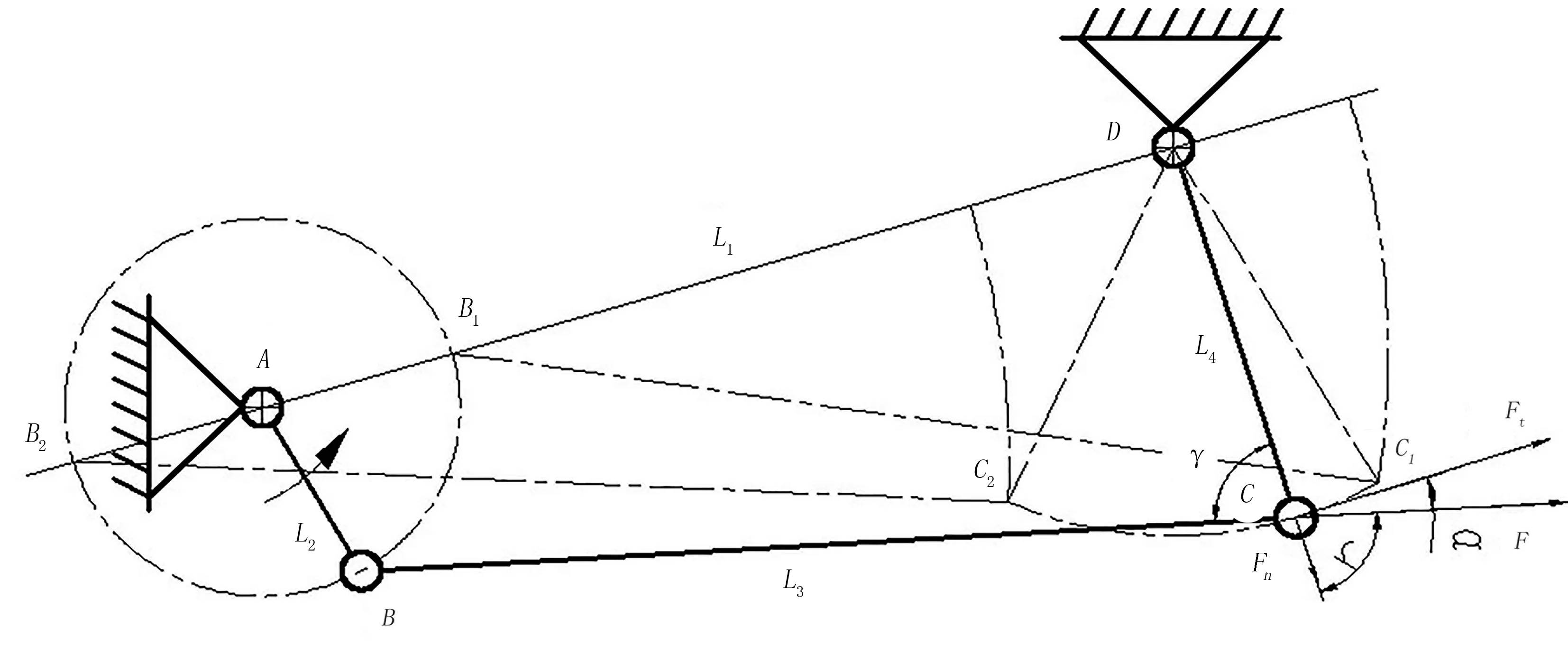
圖3 高副低代后的振動篩選機構運動簡圖Fig.3 Vibration screening machine motion diagram after low pair replacing high pair
由于傳動角應當為銳角且小于90°,γmin為γ1、180°-λ1、180°-λ2角度中最小值,記γmin=min(γ1,180°-λ1,λ2,180°-λ2)。其中
(1)
(2)
式中γ1—曲柄搖桿機構的傳動角(°);
L1—桿AD間的距離(mm);
L2—曲柄AB間的長度(mm);
L3—連桿BC間的長度(mm);
L4—搖桿CD間的長度(mm)。
2.2 行程速比系數的確定
則
(3)
2.3 優化設計
運用多目標函數優化設計法進行優化設計。其中,以最小傳動角γmin最大、行程速比系數Κ最大及總體尺寸最小為目標。
2.3.1 初始設計變量
以機構中的各桿件長度作為初始設計變量,即
x=[x1,x2,x3,x4]=[L1,L2,L3,L4]T
(4)
2.3.2 約束條件
1) 桿長條件為
(L2+L3+L4)-2max(L1+L2+L3+L4)≥0
2) 四桿機構存在條件為
(L1+L2+L3+L4)-2max(L1+L2+L3+L4)≥0
3) 曲柄搖桿機構存在曲柄條件為
max(L2,L3,L4)≥L1
(5)
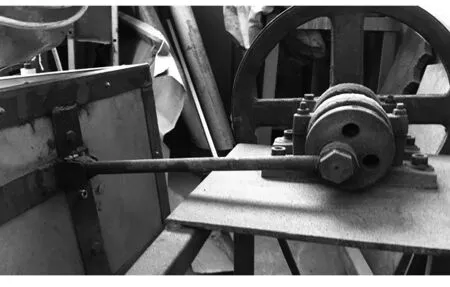
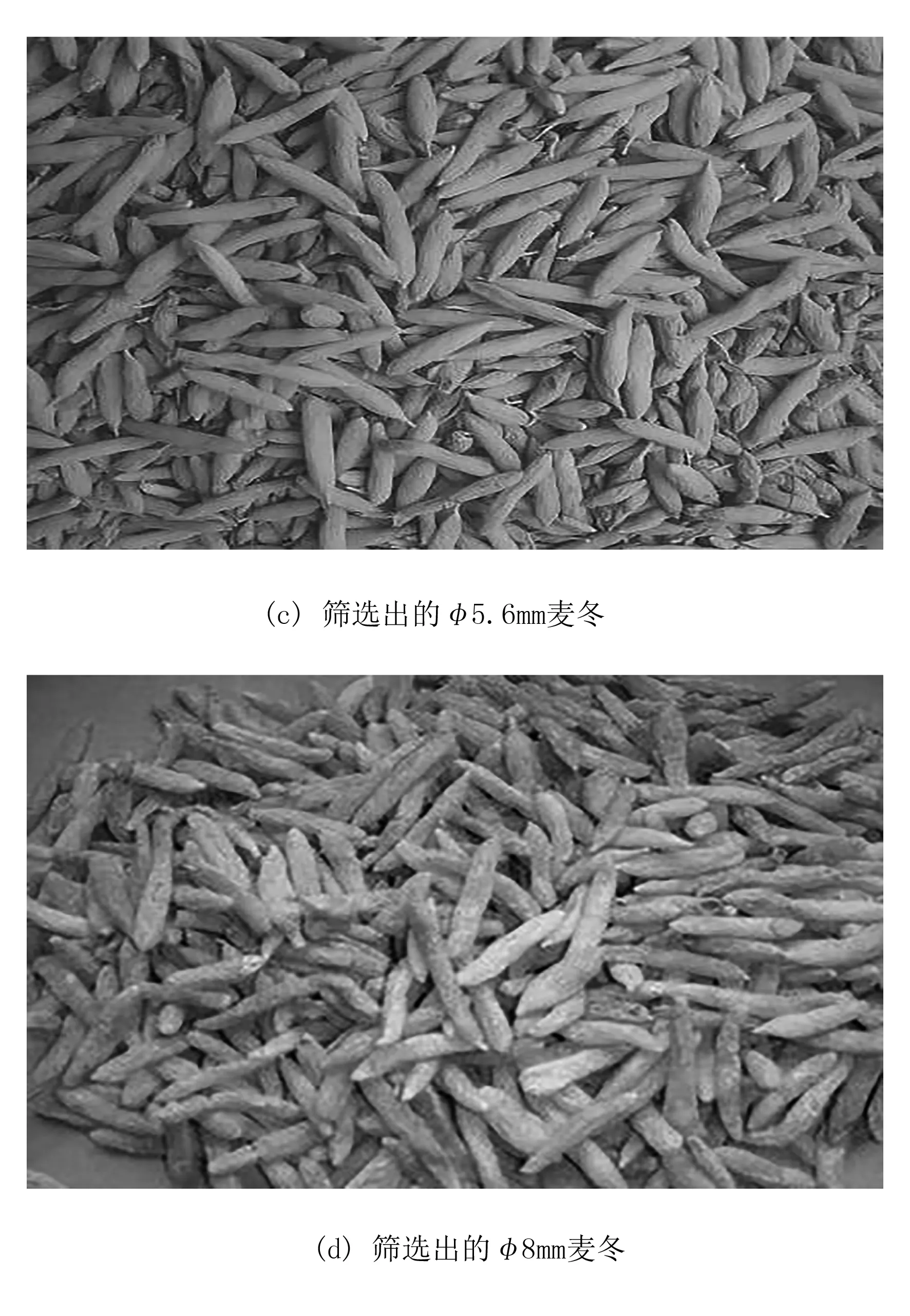
max(L1,L2,L3,L4) (6) max(L1,L2,L3,L4)≥a0 (7) 4)最小傳動角工程機械上,γmin≥[γ],在一般機械中通常[γ]=40°, [γ]為許可傳動角[9]。 2.3.3 目標函數 1)行程速比系k最大的目標函數,根據式(3),令 (8) 工程設計時,急回運動在普通程度上的Κ值為[1,3],則有m1=minf1(x)=1,M1=maxf1(x)=3,所以最大行程速比系數的子目標函數為 (9) 2)最小傳動角γmin最大的目標函數。令γmin=f2(x),則 (10) 曲柄搖桿機構在運動過程中,傳動角變化范圍為([γ],90°),則有m2=minf2(x)=[γ],M2=maxf2(x)=90°,最小傳動角γmin最大子目標函數為 (11) 3)總尺寸最小的目標函數為 f3(x)=-(L1+L2+L3+L4) (12) 4)曲柄的最小長度a0受運動副結構尺寸限制,而機構的空間安裝位置決定了桿件的最大長度為L0,則有m3=minf3(x)=-4L0,M3=maxf3(x)=-4a0,最小總尺寸子目標函數為 (13) 所有隸屬函數取得最小值的解即為多目標優化的最優值。根據以上分析,總目標函數表達式為 minF(x)=ω1F1(x)+ω2F2(x)+ω3F3(x) (14) 0≤ω1≤1,0≤ω2≤1,0≤ω3≤1,0≤F1(x)≤1,0≤F2(x)≤1,0≤F3(x)≤1。 2.3.4 篩選機構數學模型與優化結果 麥冬篩選機以4個桿長為設計變量,則設計變量為X=[L1,L2,L3,L4]T。 總目標函數為 (15) .s.t (L1+L2+L3+L4)-2max(L1,L2,L3,L4)>0 (L2+L3+L4)-2max(L2,L3,L4)-L1>0 max(L2,L3,L4)>L1 max(L1,L2,L3,L4) max(L1,L2,L3,L4)>a0 其中,f1(x)、f2(x)和f3(x)分別見式(9)~式(12)。 根據機構擬定空間設計條件,擺角初始角度為ψ=54°、[γ]=40°,四桿機構最長桿長度L0=600mm,最短桿長度α0=80mm,各個子目標函數的權重取ω1=0.4,ω2=0.4,ω3=0.2,要求在此條件下最小傳動角γmin及行程速比系數k最大、總體尺寸最小。優化結果如表1所示。 表1 麥冬振動篩選機構各桿優化結果Table l Optimization result of ophiopogon japonicus vibration screening machine 經過多目標優化設計得出曲柄搖桿機構各桿件的長度后,還原高副低代,進行了樣機的試制,如圖4所示。為了更清楚地表示振動篩選機構,給出了振動篩選機篩選機構局部放大圖,如圖5所示。 圖4 麥冬振動篩選機樣機Fig.4 The prototypeprototype 圖5 篩選機構局部放大圖Fig.5 Partial enlargement 樣機試制完成后,對樣機進行麥冬篩選試驗。試驗過程中,沒有發現不良振動、卡機等故障。篩選生產率為每小時1 000kg以上,雜質的篩分率可達95%以上,達到了預期的篩選效果。麥冬篩選結果如圖 6所示。同時,與傳統設計方法對比,發現采用新方法設計的振動篩選機節省了材料。 圖6 樣機麥冬篩選效果Fig.6 Screening renderings 麥冬振動篩選機設計時,利用多目標優化方法對其振動篩選機構優化求解,要求最小傳動角γmin和行程速比系數Κ都最大、總體尺寸最小。利用優化結果試制的樣機完全達到預先的篩選效果,篩選出的直徑大小為φ3.6、φ5.6、φ8mm的麥冬幾乎完全符合要求,證明了該優化方法不但節約材料,還能夠達到提高傳動效率和運動精度目的,實用性強。


2.4 優化設計結果

3 樣機的制作與驗證
3.1 樣機試制

3.2 樣機試驗

4 結論
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14艦船科學技術(2022年8期)2022-06-05 07:36:28房地產導刊(2022年5期)2022-06-01 06:20:14建材發展導向(2021年12期)2021-07-22 08:06:48建材發展導向(2021年7期)2021-07-16 07:07:52中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56中國公路(2017年18期)2018-01-23 03:00:38數學物理學報(2017年6期)2018-01-22 02:26:40
