振動式林果采收機的機械化試驗研究
2019-12-24 00:58:48劉斌
農機化研究 2019年5期
劉 斌
(浙江紡織服裝職業技術學院,浙江 寧波 315211)
0 引言
林果采收是我國農副業水平發展的重要體現,具有季節性、勞動強度大等特點。隨著我國林果種植業的不斷發展,用于采收的機械裝備智能化水平也在不斷提升。近年來,國內外學者均致力于對林果采收機的優化研究,相比較而言,國外較國內技術更為先進。目前,主要的林果采收機包括沙棘果、藍莓及核桃等采收設備。根據我國林果業種植特點,筆者以振動學理論為前提,分析林果在振動采摘過程的脫落原理,結合林果在振動激勵下的運動學規律,通過有限元分析方法,針對常用的振動式林果采收機進行了試驗研究。
1 工作原理及特點
林果采收機根據作用于林果上的力的形式不同,可以分為振動式、氣吹式及搖擺式等。針對機械振動式,主要構成包括動力源裝置、液壓控制裝置、力傳遞裝置及振動執行裝置等。工作原理:基于振動學理論,給予林果采收機一定的激振力,在智能控制系統的調節下,通過力傳遞到達采摘的林果樹枝位置,通過不同頻率的激振,產生共振效果,最終達到林果從樹枝上脫落的目的。其中,需要配備具有林果位置識別的圖像成形技術、位置傳感裝置及靈敏的檢測裝置等,同時對林果的沖擊損傷及最佳激振頻率給予適時調節與控制,從而達到機構緊湊靈活、采收性能優良的目標。
本設計的振動式林果采收機的特點在于應用較為廣泛,結構間的設計組合比較適合我國林果業的種植采收間距,符合林果的結實分布,對于采凈率的提升和果實損失率的控制易于實現。表1為擬研究的振動式林果采收機相關核心技術參數。
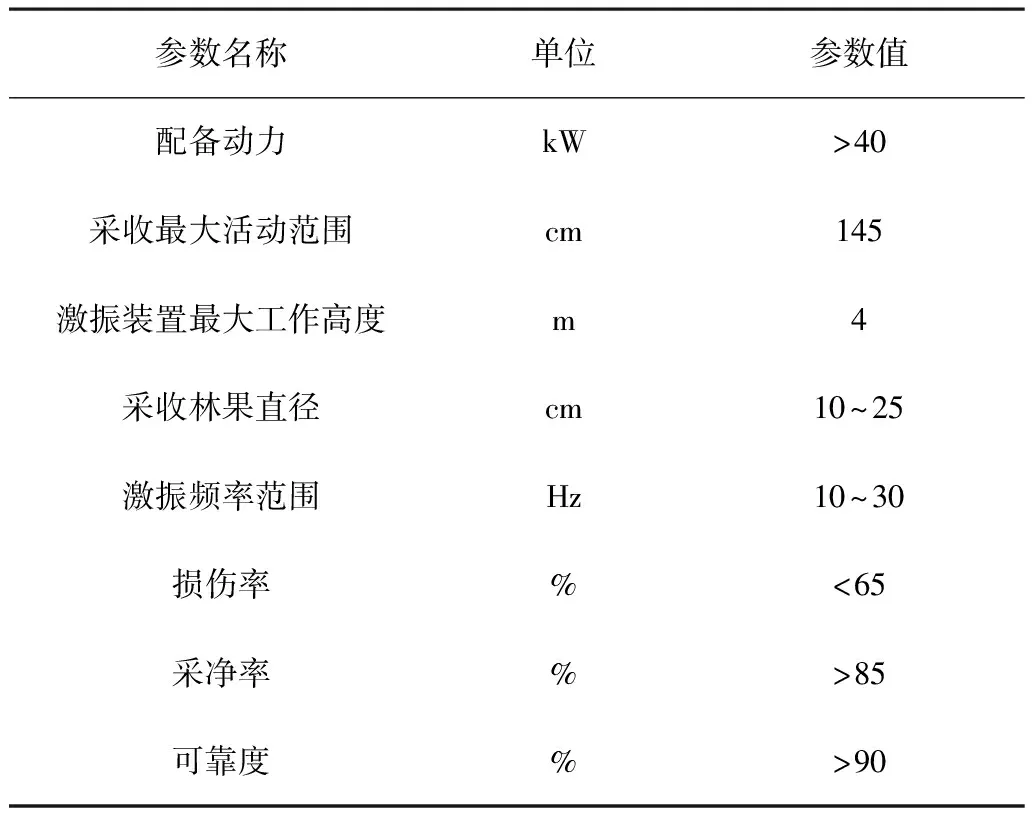
表1 振動式林果采收機核心技術參數
振動式林果采收機的機械化設計流程如圖1所示。通過對其適用的林果及所需性能進行針對性設計實現相關功能,從而建立較為符合實際的林果采收核心模型,對機械機構進行動力學分析、有限元分析并進行激振采收試驗,獲得相關試驗參數,最終得出合理的機構參數與采收配置。
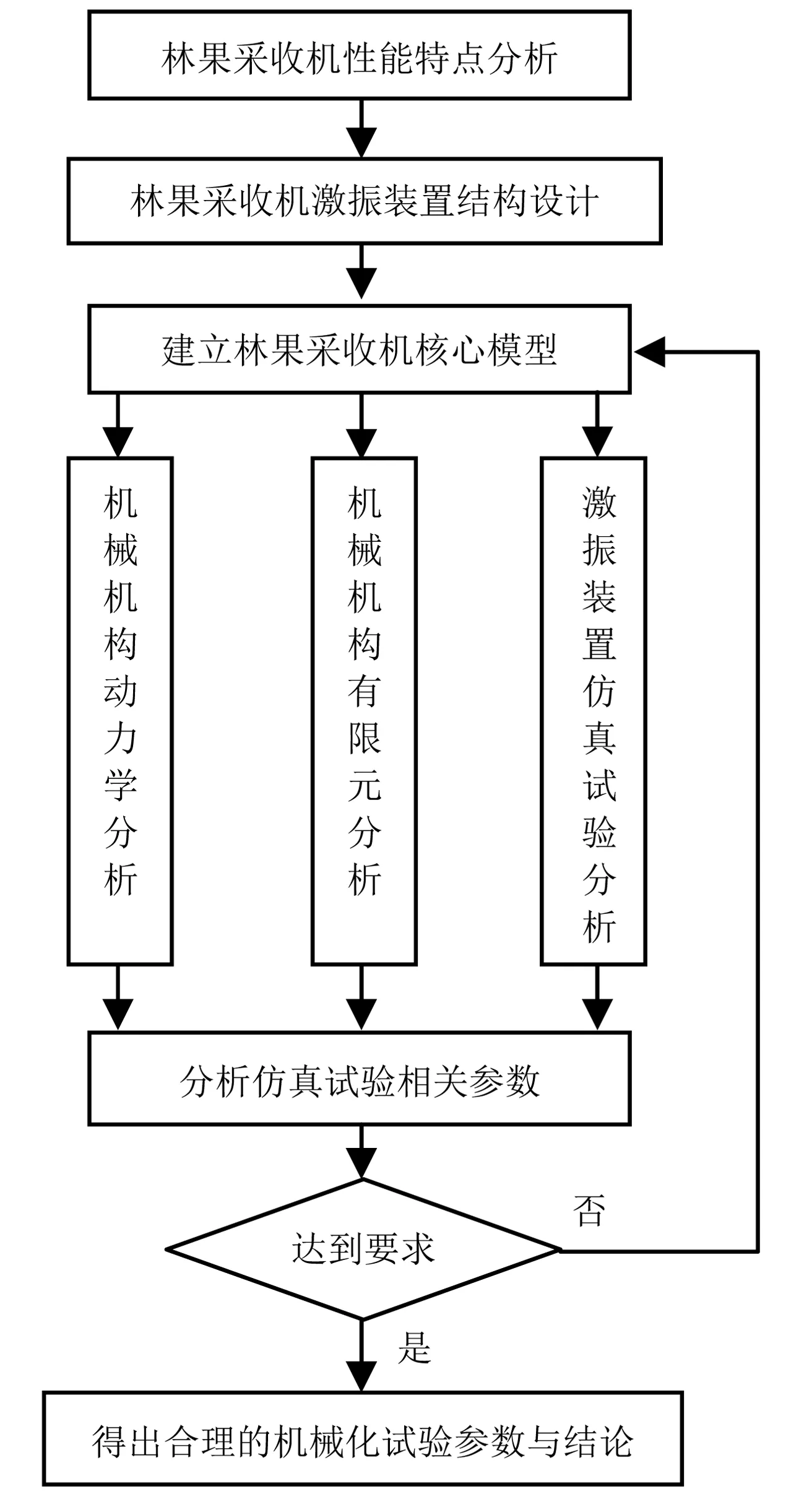
圖1 振動式林果采收機機械化設計流程圖
2 結構設計
2.1 理論模型
當林果在采收機的采摘裝置作用下產生預設強度的激振,其動力學模型由動能和勢能組成,因此通過簡化,建立理論模型為
(1)
(2)
(3)
式中T—林果受到激振產生的動能(J);
V—林果的勢能(J);
L—拉格朗日函數(J);
m—林果的質量(kg);
g—重力加速度;
l—林果離地長度(m);
IC—林果的轉動慣量(kg·m2);
k—等效彈性系數;
x0、y0—分別為采摘臂的位移(m);
θ—采摘臂與林果的夾角(°)。
2.2 物理建模
根據該林果采收機的核心激振裝置的部件組成,利用三維繪圖軟件Pro/E對激振器的偏心塊、夾持機構、限位機構、鏈條及轉軸等進行逐一建模,并組建成如圖2所示的林果采收機激振裝置三維模型,作為進一步模態分析和理論計算的基礎。

圖2 林果采收機激振裝置三維模型圖
2.3 模態分析
利用Workbench進行林果采收機的激振裝置模態分析,首先進行尺寸準確計算,導入模型,需注意簡化部位及產生振動部位,靜、動力學分析結合,設置相應的彈性模量、泊松比機材料密度。部分模態響應參數選擇及設置如圖3所示;通過正確網格劃分后進入模態求解,林果采收機激振核心裝置4階模態振型如圖4所示。
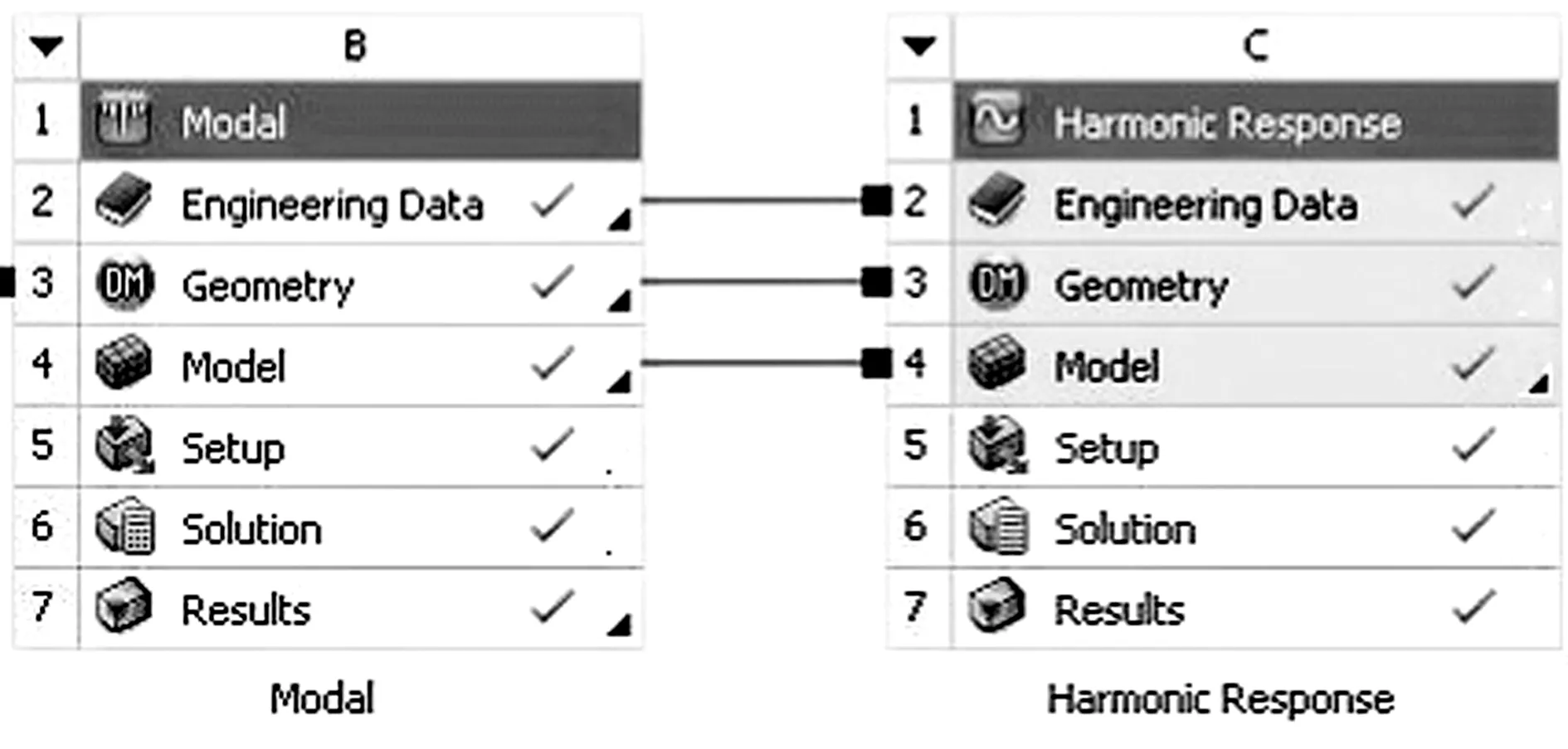
圖3 模態響應參數選擇及設置
從圖4中可知:在軸向方向變形主要體現在激振裝置2階和3階模態振型中,在徑向方向變形主要體現在激振裝置1階和4階模態振型中,且當2階模態振型之后,該裝置的固有頻率遠遠超過采收有效頻率和林果樹枝本身的振動頻率,說明該裝置在進行振動采收作業過程中具有足夠的可靠度。
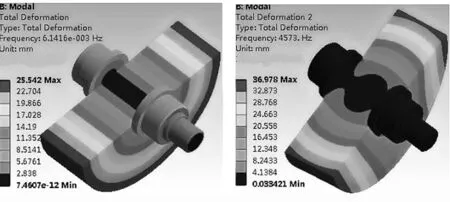
第1階模態振型 第2階模態振型
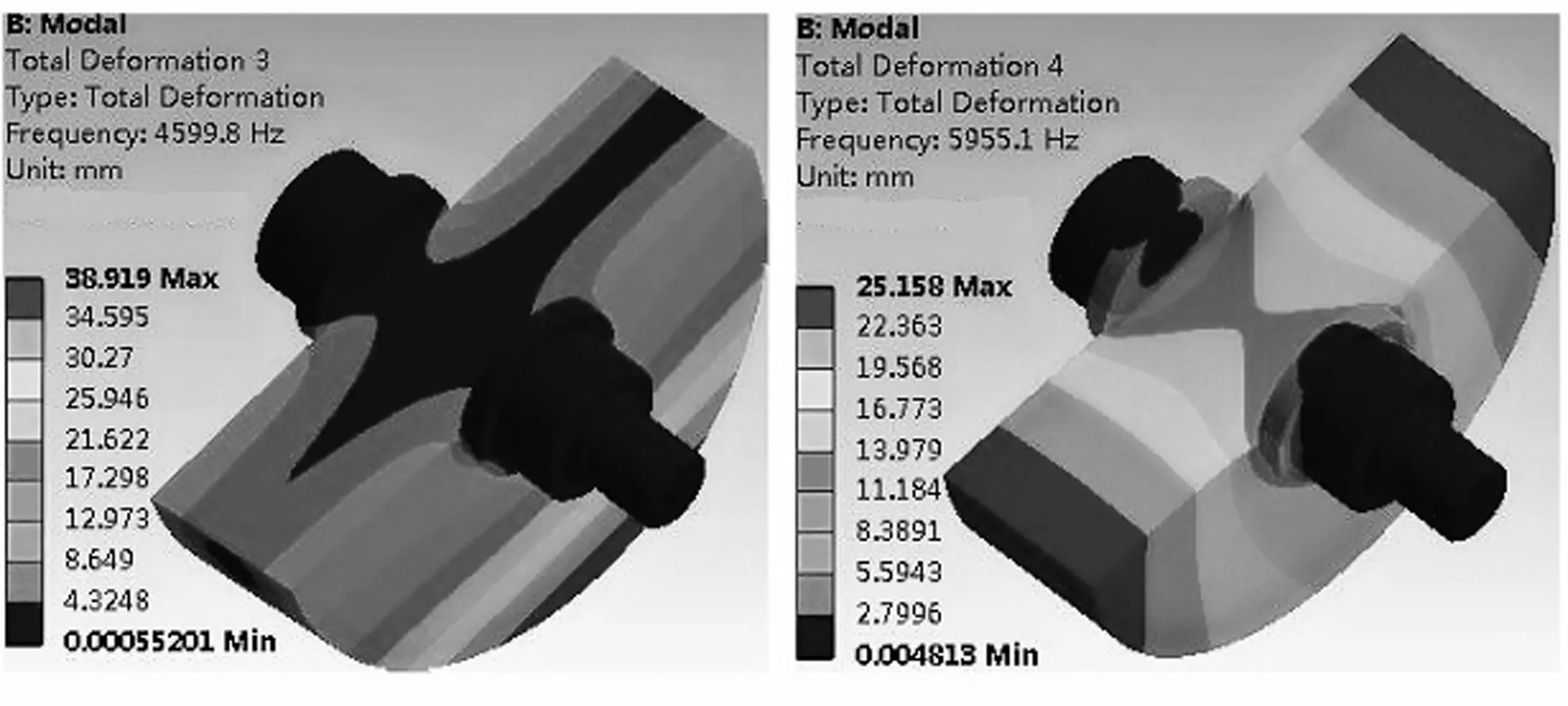
第3階模態振型 第4階模態振型
3 試驗
3.1 試驗條件
圖5為林果采收機振動測試系統組成改進簡圖。工作時,通過加速度傳感器對振動信號進行實時輸入,經放大調節裝置傳遞至數據采集卡,之后進入軟件控制系統,進行數值分析與顯示,完成振動信號的終端輸出。為更好地驗證振動采收效果,進行簡易組裝對某林果進行了振動采收試驗(見圖6),這一試驗過程在給定振動頻率(15~25Hz)范圍內進行。
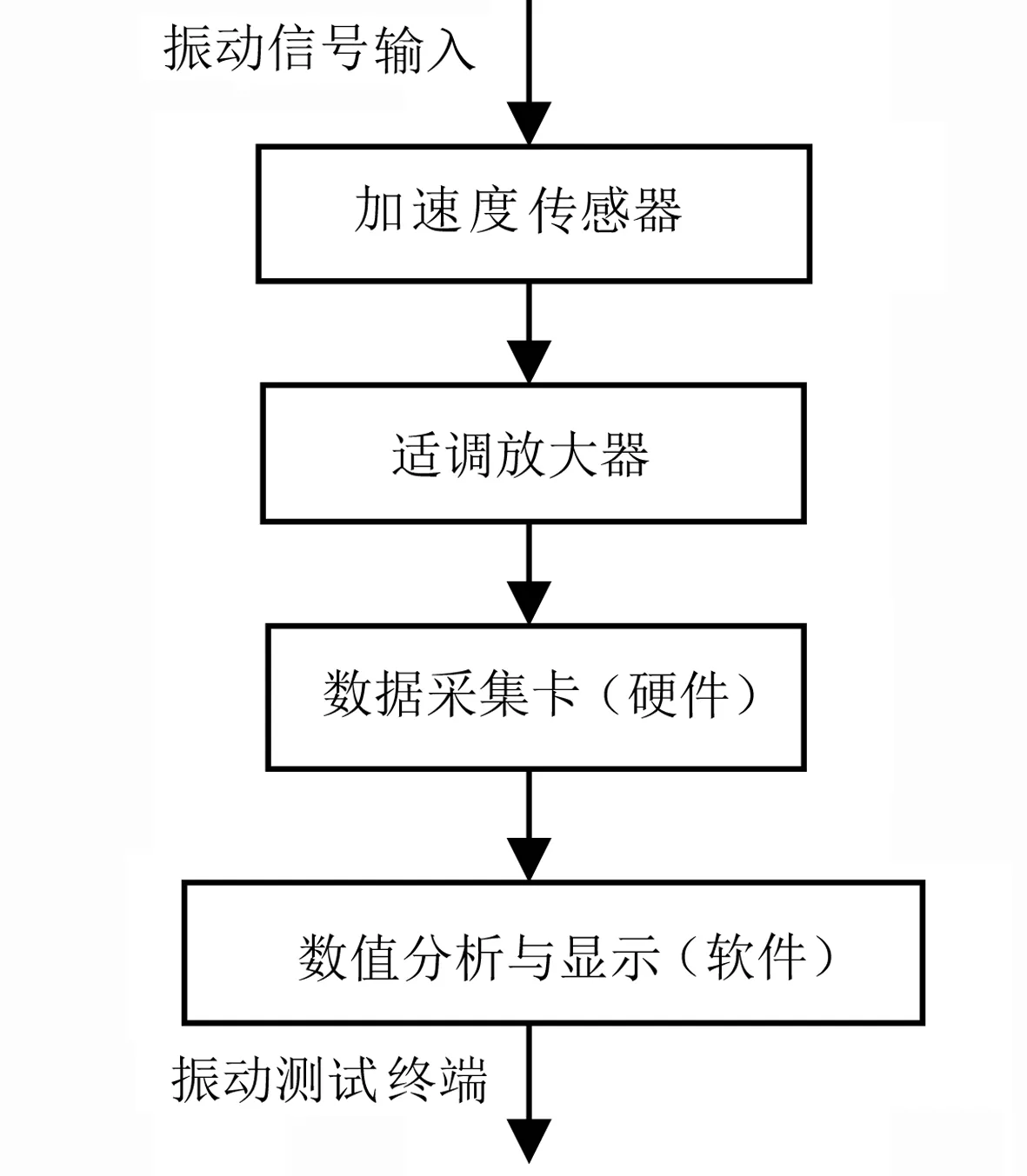
圖5 林果采收機振動測試系統組成簡圖
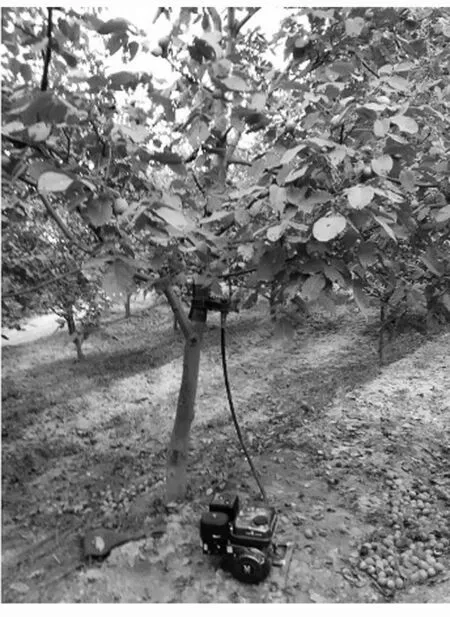
圖6 林果采收機振動采收試驗
3.2 過程分析
振動式林果采收機的控制系統在S7-200PLC控制的指令下,一方面對夾持裝置、激振裝置及限位報警進行動作輸出;另一方面通過RS232/RS485進入嵌入式觸摸屏,將振動頻率信息、采收林果參數信息等發布至監控裝置主界面,形成有效的閉環。
表2為不同激振頻率下的林果采凈率與林果樹枝損傷率的數據統計。由表2可知:當給定的激振頻率在15~18Hz之間時,林果采收機的作業效率不能發揮出來,兩個衡量參數都較低;當給定的激振頻率在19~20Hz之間時,林果采收機的作業效率可發揮到最佳,此時平均采凈率可達到88%以上,林果樹枝損傷率可控制在61%左右;當給定的激振頻率為21Hz以上時,平均采凈率可達90%以上,但是林果樹枝損失率也隨之加大,不可取。

表2 不同激振頻率下的林果采凈率與林果損傷率
表3給出了此機械化試驗的綜合采收效果對比。就關鍵衡量參數而言,理論模型計算與實地試驗記錄參數值之間的誤差可控制在6%范圍內,驗證了振動式林果采收機機械結構設計與試驗的可行性。

表3 理論與試驗實現效果對比
4 結論
1)根據我國林果采收特點及采收機工作機理,建立了林果采收機激振裝置的三維物理模型,并進行模態分析,證明在工作頻率范圍內此采收機具有較高的可靠工作性能。
2)通過配備智能監控系統,對振動式林果采收機進行實地試驗,改變不同激振頻率,得出振動式采收機的最佳作業效率發揮范圍,此時激振頻率控制在19~20Hz,平均采凈率可達到88%以上,林果樹枝損傷率可控制在61%左右。
3)此振動式林果采收機的理論模型與實地試驗誤差控制在6%范圍內,驗證了此機械化試驗的可行性,可為相似采收設備提供一定的優化思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
