采用極坐標復合運動模態的大型車輛輸送機構設計
2019-12-30 09:31:10孔維雄宋書飄
遵義師范學院學報 2019年6期
關鍵詞:設計
楊 航,孔維雄,宋書飄
(遵義師范學院工學院,貴州遵義563006)
1 前言
隨著科學技術帶動經濟的發展,人們的生活水平不斷得到提高,汽車成為人們必不可少的一部分[1]。汽車不再以運輸貨物為用途,更多的是成為人們的出行交通工具。汽車的增多就需要更多的停車位,必須把停車位的空間利用率提高,所以出現了立體車庫[2-4]。特別在一些發達國家對于出現的車多停車位少的問題,他們積極開展研發能解決停車的機械式停車技術。通過相關技術制造投入市場所使用,解決了出行停車難的部分問題。特別以德國研發的立體停車裝置處于領先地位,他們研發的停車庫形式多種多樣,能滿足不同地形的使用要求[5,6]。在歐洲地區立體停車設備并不少見,以巷道堆垛式、多層升降橫移式的停車車庫為主[6,7]。在美國,立體停車庫得到快速發展,在有的大型商場都會見到機械式立體停車裝置,并且種類繁多[8]。
近年來,中國經濟快車飛速開來,加快了城市化進程[9],汽車制造技術不斷得到提高,特別是小轎車市場需求得到快速發展,使得汽車保有量的不斷增加[10]。停車難的問題主要體現在都市的住宅小區、寫字樓、購物中心等地區。然而,在城市建設中沒有對停車設施考慮到位,停車位的增加速度卻始終跟不上汽車的增加速度。在短期能夠緩解停車難的問題,最主要方法就是建設立體停車庫。
2 大型車輛輸送機構類型及特點
機械式立體停車裝置的種類繁多,根據原理和設計結構的不同可分為六大類,分別為:垂直循環式立體車庫[11,12]、垂直升降立體車庫[13]、簡易升降設備[14]、多層升降橫移、無避讓停車設備[15,16]、兩層升降橫移設備,這幾類停車裝置各有其特點和優勢。所以選擇的類型比較多,用戶可根據地理環境的不同選擇安裝合適的停車裝置。
垂直循環式立體車庫是現有的最常見的停車裝置,只使用差不多兩個車位的面積就能建設這樣一個停車庫,能停下十幾輛小橋車,所以極大的提高了車位的利用率。垂直循環立體車庫是以垂直方向做循環運動的停車系統,完成存取車輛。
垂直升降立體車庫是利用提升機構將小汽車提升或者下降到指定層,并采用存取交換機構存取小汽車的機械式停車設備。簡易升降設備是在地面層直接存取車,上層車位降下后可取下層車位的車輛,取上層車位時,地面車位必須開走。其特點是二倍增加車位、設備結構簡單、安裝操作簡單、出入車視野開闊。
多層升降橫移設備,此類停車庫主要由升降機構、搬運小車機構、停車板來完成,升降機可作上、下運動。
無避讓停車設備,下層小車不動,將載車盤移動到相應位置,車主將車開上載車盤,通過提升機構提升到一定的高度,接著順時針旋轉90。,然后再移動指定的距離小車就停入庫中,取車便是相反的操縱運行。
兩層升降橫移設備,利用存車板的升降(和)橫向平移存取停放車輛的機械式停車設備。對土建要求較低,可建在露天,也可以建在建筑的地上、地下、規模可大可小,可根據不同的地形和空間進行適當的裝配組合。所以這類停車庫裝置運用較為廣泛。
3 基于極坐標復合運動模態的車輛輸送機構
關于立體停車庫的設計有很多種類,但各種車庫都有不同形式的優缺點。本文所設計的停車庫是基于極坐標運動的形式來設計,極坐標運動也就是旋轉運動[17]。雖然也有人發明了一種類似摩天輪的停車裝置,但是這類停車裝置只依靠重力來提供平衡,在運行過程中會存在搖擺晃動的現象。為了解決車位的擺動,設計了這款新型的停車裝置,該停車裝置采用減速電機驅動,鏈條傳遞動力。使用SOLIDWORKS進行三維建模,得出該停車裝置設計模型如圖1所示。通過鏈傳動帶動連桿旋轉來實現停車托盤的升降。并根據停車托盤的運動軌跡設計定位圓環,安裝定位圓環來限制車位的移動,解決汽車在運行過程中出現滑移或搖擺的現象,使每個停車托盤始終保持水平,提高停車安全系數。該裝置共有8個停車位,相鄰兩個車位之間與回轉中心的連線所構成的夾角為45。。由于車輛輸送裝置采用極坐標形式,在旋轉方向具有對稱等效性,因此車輛間的層高不會隨著車輛具體位置發生變化。其層高差始終為旋轉半徑的1/。圖中每個停車位對應一個停車托盤,一個停車托盤只能停一輛車。
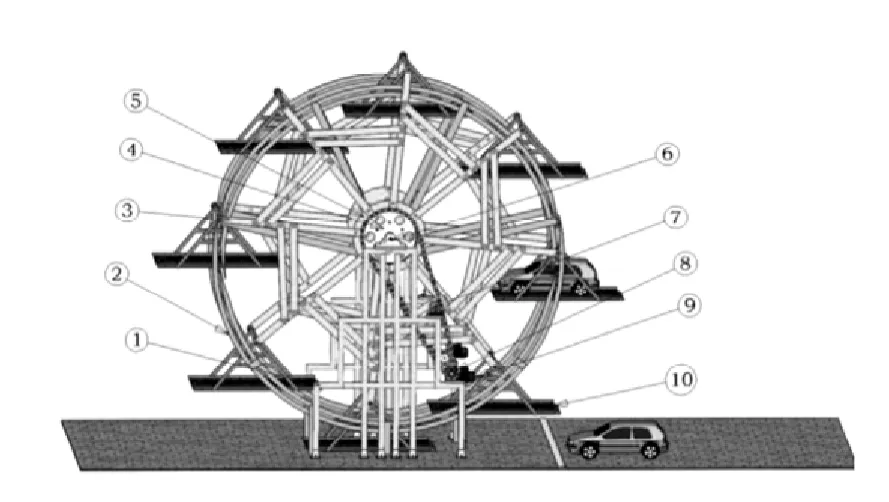
圖1 極坐標停車庫總體圖
驅動機構采用電機9和減速箱8所組成的減速電機驅動,能提供足夠的轉矩并且在不工作時能夠實現自鎖。用鏈條和鏈輪傳遞動能,鏈條帶動大鏈輪4,驅動轉盤5及連桿3旋轉實現停車托,10的停車位的移動,為了提供比較大的力矩,所以在支承架1的兩邊都安裝有相同的減速電機,并安裝壓緊輪7來壓緊鏈條。在鏈條的帶動下同時啟動兩邊的大鏈輪4,大鏈輪4與轉盤5用螺栓連接固定在一起繞中心軸6轉動,停車托盤10上的小車會在重力的作用下會保持水平,但可能會受到外界因素的影響,出現搖擺不定的現象,比如在刮風下雨時很可能出現停車托盤搖擺不定,所以安裝了定位圓環2,停車托盤10就在定位環2所固定的路線上運動,起到限制每個停車位不搖擺晃動。停車位以極坐標運動的形式穩定運動,實現停-取車輛的目的。
大部分的設計的停車裝置只能停小型橋車,而現在市場上的SUV型汽車在長、寬、高方面都比普通橋車大。為了能夠使停車裝置能夠停下多種類型的車輛,停車托盤的長寬高的設計是以現在市場最常見的MPV型小車的大小所設計的,這類車型的長寬高都比一些家用SUV大,其長為4780mm、寬為1780mm、高為1755mm,所以能夠容納很多類型的車輛。要使停車托盤在運動的過程中始終與地面保持平行,所以加裝了定位圓環是必不可少的,它能保證車子停在托盤上不晃動,防止危險事故的發生。
4 輸送機構機電一體化詳細設計
4.1 基于極坐標運動的停車裝置總體結構
4.1.1 停車裝置的主系統
如圖2所示為停車裝置的主系統,是由支撐架、支座、大鏈輪、停車托盤、轉盤與連桿等組成,支撐架是采用普通碳鋼所焊接的鋼架結構搭建而成,支座與中心軸連接固定不動,大鏈輪和轉盤用螺栓固定在一起并繞中心軸轉動,連桿與轉盤再用螺栓連接安裝在一起,連桿又與停車托盤用軸連接,當大鏈輪轉動時停車托盤就能夠上下移動,實現移動車位的目的。

圖2 極坐標停車裝置主系統
4.1.2 停車裝置的定位系統
定位系統是由連桿、停車托盤、定位圓環等組成,定位系統具有保護的作用,是固定停車托盤不會在運行的過程中或是其他外力的作用下搖擺晃動,如圖3所示是該停車裝置的定位系統,停車托盤的兩側都有凸出來的圓柱,圓柱能夠在定位圓弧溝槽中移動,就能將停車托盤固定軌跡運動。可以將停車托盤、連桿、定位圓環三者看作構成了個三角形,因為三角形具有穩定性,所以停車托盤就不會搖擺晃動。

圖3 定位系統
4.1.3 停車裝置的驅動系統
驅動系統由電機、變數箱、鏈條、壓緊輪、鏈輪等所組成,通過PLC編程技術控制,如圖2、3所示。該機構裝置采用電機與減速箱構成的減速電機啟動,減速箱中有蝸輪蝸桿,這樣構成的減速電機能夠自鎖,并且在支撐架上安裝兩個電機。需要兩個減速電機同步啟動,這樣才能夠提供足夠的運行功率,因為可能出現啟動不同步的現象,所以需考慮兩個電機啟動后所產生的耦合性問題。在加上啟動時通過鏈條傳動時會出現瞬時傳動比不恒定的現象,所以在選擇電機時需要優先考慮電機轉動時轉速的準確度。電機通過減速箱傳遞力矩,減速箱是否能夠提供足夠的轉動力矩才能讓把轉盤轉動?這樣需要計算電機的功率,選擇合適的電機。
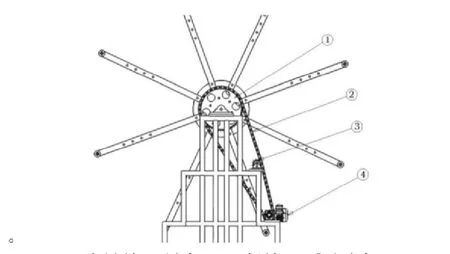
圖4 驅動系統
通過查閱資料,一般的家用橋車的重量在1200kg到1300kg之間,中高級橋車的重量在1400kg到1600kg之間,一些SUV的重量在1900kg左右,為保證安全承載重量,我們設定汽車與停車托盤的最大重量為m=2300kg來計算,在運行過程中防止停車托盤搖擺不定,所以需要鏈輪的運動速度小并且勻速轉動,所以取大鏈輪的轉速為n=1.5r/min。減速箱的傳動比設為1:96,小鏈輪與大鏈輪的傳動比為1:10。
電機的輸出功率:

根據作用于轉動剛體上的力的功率等于該力對轉軸的力矩與速度的乘積,即變速箱的輸出功率為:

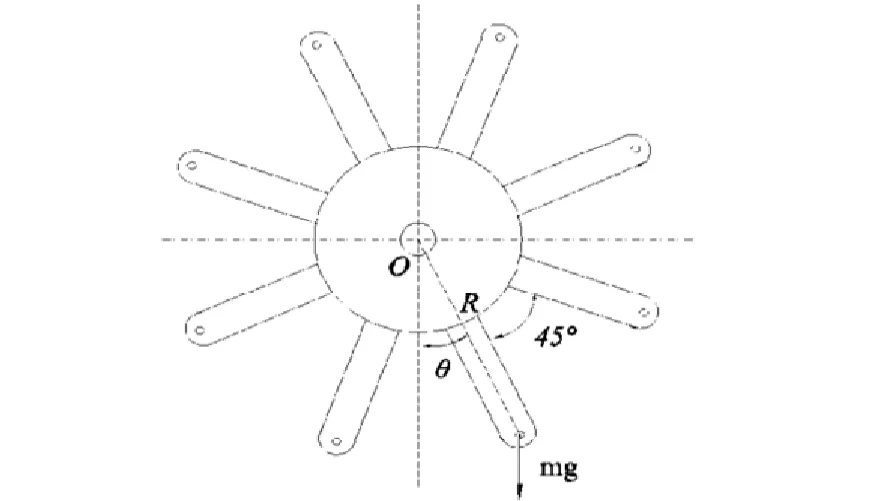
圖5 停車托盤的重力對連桿的作用力圖
如圖5所示,當停車托盤的重力相同時,對中心軸的力矩為:

當重力只在虛線的右半部分時,對中心軸的力矩為:



圖6 對中心力矩最大點處的函數圖像
由于是兩個電機驅動,所以單個減速箱的功率為27.74kW,經過查《機械設計手冊》取聯軸器的效率為0.993;軸承的效率為0.996。帶入上式得:

電機的功率為:

根據計算結果選擇電機的型號,選取型號為Y200L.2的電機,其轉速為1440 r/min、額定電壓380V、效率90.5%、功率因數0.89,可控制正反轉。
4.2 極坐標復合運動模態智能控制
該停車裝置的轉盤在運行過程時會根據系統測出的情況運行不同的角度,由于該裝置共有8個車位,所以連桿之間的夾角是450,轉盤會出現順時針轉動 180。、135。、90。、45。或逆時針轉動 180。、135。、90。、45。的情況。
當車主需要停車時,存儲按鈕,停車系統通過判斷距離地面最近空車位,PLC記錄此位號并打印條形碼,無車位則不能打印出條形碼。就類似于超市里面的免費儲物柜的工作原理,車主收起條形碼,條形碼丟失造成不能取車只能由工作人員來取車。電機通電后通過鏈條和鏈輪的帶動,將停車托盤轉到停-取車的位置,此時電機停止工作,只能等待下一個車主來輸入信號是存車還是取車。轉盤轉動的距離由旋轉編碼器計算,利用PLC的高速計數器功能處理此信號,待車主將車開到停車托盤的指定位置后便停好了車輛。取車過程則是將條形碼對準掃面口,系統識別出停車位,電機通電后經過鏈條和鏈輪的帶動,將轉盤轉到停-取車的位置,電機同樣停止工作等待下一個信號的輸入,車主就能開走自己的車,如圖7所示為停-取車的路線圖。
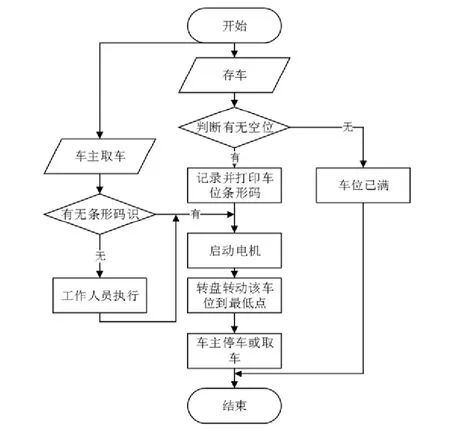
圖7 停-取車過程運行路線圖
5 車輛輸送裝置動力學設計與尺寸校核
5.1 單個車庫的設計

所以停車托盤在運行過程中既有水平方向的運動,又有豎直方向上的運動。在運行過程中如果遇到雨雪天氣,車身上的淤泥會被洗涮下到停車托盤上,又會流到下方停車托盤的車輛上,弄臟其它車輛,所以設計了如圖8所示的停車托盤,在托盤中留有承載雨雪的溝槽,在溝槽的上方用網狀板鋪墊,這樣不僅能讓雨水流入槽中,還能增大車輪與板的摩擦系數,防止車滑動。

圖8 停車托盤模型圖
5.1.1 車輪限位裝置的結構
在停車時需要將車停靠在指定的位置,防止干涉其他停車托盤的運行,這時候需要一個裝置來限制車輛是否停止到位,考慮到停車盤的質量不能太重,因此不能再在車盤中加裝其它驅動機構,只能通過傳感器信號來控制車輛的停放位置。如圖 9所示,在停車托盤的圖示位置上安裝車感信號感應器,當車移動到位時信號燈會發出綠光,當超出停車范圍時會發出紅光。

圖9 傳感器安裝位置
5.1.2 定位圓環限位裝置的安裝布局
定位圓環限位裝置是為了能讓停車托盤能夠保持水平實現平動,防止車輛在車盤上出現搖擺晃動的現象。所以設計了定位圓環用來實現停車托盤的限位作用。定位圓環是根據雙曲柄機構的機械運動原理設計,是將從動曲柄的運動用圓環代替,在雙曲柄機構中,兩個曲柄的長度相等并且平行,則稱其為平行四邊形機構,圖10所示平行四邊形機構。這種機構最顯著的特點連桿作平動,該定位圓環的安裝布局原理就是按照平行四邊形機構運動原理進行安裝。
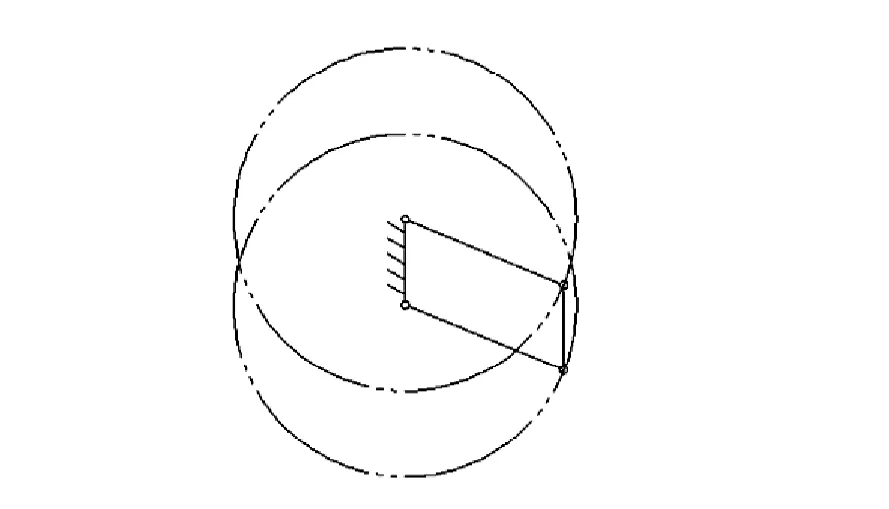
圖10 平行四邊形機構
從上圖可看出兩桿的運動軌跡出現相交的現象,所以設計定位圓環就分成了兩部分,因此限位裝置在安裝的過程中比較困難,因為這個裝置是一個分割成兩部分的圓環,上半部分是和中心軸固定在一起,通過機械零件連接,可以上下調節圓環與中心軸之間的距離,中心軸是固定在支座上不作轉動,定位圓環就固定不動。下半部分固定在地面上,需要調整圓心與上半部分的圓環相重合,才能保證停車托盤在運行過程中不會出現卡死的現象。
5.1.3 停車盤限位裝置的作用

圖11 限位裝置布局圖
如圖11所示,定位圓環中的槽口是停車托盤上兩側凸出的圓柱體運動的軌道,定位圓環就能限制停車托盤的擺動,圓柱體能夠在定位圓環中移動,停車托盤、連桿、定位圓環和機架四者構成雙曲柄機構,也稱平行四邊形機構,保證了停車托盤始終水平。
5.2 模型的運動仿真分析
利用 SOLIDWORKS所帶的插件 SOLIDWORKSMOTION做運動仿真。運動仿真能夠減少機械產品在設計當中遇到的問題,可以有效的防止設計時出現的問題。此外,這款軟件里面的有限元插件還能與SOLIDWORKSMOTION所輸出的運動載荷實現有機結合,從而有利于對運動構件的強度進行校核。
將停車裝置的三維模型建好后,在裝配的環境下設置好配合關系,才可以進行仿真。利用SOLIDWORKSMOTION插件進行仿真。給大鏈輪添加旋轉運動,通過表達式填寫連桿的受力。設置完以后,分析時直接點擊MOTION分析,再點擊計算算例后,軟件就生成運動動畫,其中進行零件的干涉檢查是仿真運動的一個重要作用,運動仿真分析后并沒有發現零件之間存在干涉,所以初步認定結構設計合理。并計算出停車托盤的加速度,平均轉動力矩,如圖12所示。

圖12 停車托盤運動仿真圖
5.3 減速箱軸的尺寸校核
減速箱的輸出軸受力較大,受力情況比較復雜,所以要對此軸進行受力分析。減速箱的軸的直徑為=0.09m,軸的材料為40Cr,查資料得知其許用切應力[]=211.1MPa,在前面已經得出減速箱需要提供的最大功率為max=27.74kW,因為小鏈輪與大鏈輪的傳動比為1:10,大鏈輪的轉速為=1.5r/min,再由公式=M得出,減速箱需要提供的轉矩為:


圖13 減速箱輸出軸的受力圖
輸出軸可看作為等直圓桿,如圖13所示是軸的受力圖,在軸上的力偶矩為=17660m。先求軸中間任意橫截面2-2上的扭矩,應用截面法將軸沿橫截面2.2處假想地截分開,并研究其左半段軸的平衡。由平衡方程

按軸的變化情況,規定軸因扭轉而使其縱向線在某一段內有變成右手螺旋線的趨勢時,則該段軸截面上的扭矩為正,反之為負。作出軸的扭矩圖,如圖14所示。
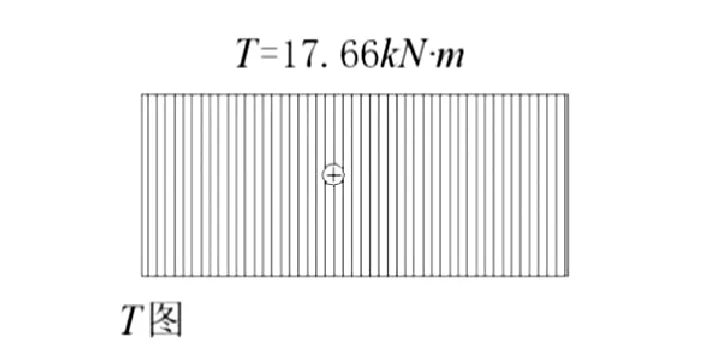
圖14 減速箱輸出軸的扭矩圖

扭轉截面系數以及強度校核條件為:

所以,滿足強度要求。
6 總結
基于極坐標運動復合運動模態的停車裝置采取減速電機驅動、鏈條傳動、PLC編程控制等。本文所設計的停車裝置可以解決都市的住宅小區、寫字樓、購物中心等地區停車難的問題,該停車裝置具有容量大、空間利用率高、機械結構簡單、泊車方便、安裝和維護方便、占地面積小等優點。
根據停車托盤的運動軌跡設計定位圓環,安裝定位圓環來限制車位的移動,解決汽車在運行過程中出現滑移或搖擺的現象,使每個停車托盤始終保持水平,提高停車安全系數。該裝置共有8個停車位,相鄰兩個車位之間與回轉中心的連線所構成的夾角為45°。與直循環式立體車庫、垂直升降立體車庫比較起來,在停車效率方面具有優勢,前兩者場地利用比一般為1:2,本裝置可以達到約2.2:8。與多層升降橫移等車輛輸送裝置比較起來,雖然在場地利用效率方面不足,但是在使用的便利性和可靠性方面有優勢。
裝置的主系統是由支撐架、支座、大鏈輪、停車托盤、轉盤與連桿等組成;定位系統由停車托盤、連桿、定位圓環;驅動系統由電機、變數箱、鏈條、壓緊輪、鏈輪等所組成。以極坐標的運動原理所設計的機械式力體停車庫,首先確定這種立體車庫的可行性,設計的各零部件是否滿足其設計要求,通過運動仿真和靜力學仿真分析,驗證結構的可行性。
立體車庫有著很大的發展空間和很多的使用價值。有些停車庫已經作為一些特殊的建筑,引來更多的人的重視,所以研究立體停車庫的人越來越多,在空間的利用率得到提高,從手動變為自動,并不斷取得新的進展。設計出符合地形地貌的立體停車庫,滿足人們的使用需求,不再讓交通變得擁堵,提高出行速度,同時提高了辦事效率。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
