基于MSP430的電動小車動態無線充電系統
2020-01-03 10:09:02崔子龍朱沛康李熙然
現代信息科技 2020年14期
崔子龍 朱沛康 李熙然

摘? 要:為進一步加深對電動汽車無線充電技術的研究,對該技術作更深層次的理解,文章設計了一種電動小車動態無線充電系統,所述裝置由MSP430F169芯片、無線充電模塊、電機驅動模塊、超級電容儲能模塊和穩壓模塊五個部分組成,從而實現小車循跡前進、定點停車功能,并由超級電容通過穩壓電路供電給小車系統及MSP430F169控制核心,進而控制小車的工作模式,實現設計要求。
關鍵詞:MSP430F169芯片;動態無線充電;小車循跡;定點停車
Abstract:In order to further deepen the research on the wireless charging technology of electric vehicles and make a deeper understanding of the technology,this paper designs a dynamic wireless charging system for electric vehicles. The device is composed of MSP430F169 chip,wireless charging module,motor driving module,super capacitor energy storage module and voltage stabilizing module,so as to realize the functions of car tracking and fixed-point parking. And the super capacitor supplies power to the car system and MSP430F169 control core through the voltage stabilizing circuit to control the working mode of the car and realize the design requirements.
Keywords:MSP430F169 chip;dynamic wireless charging;car tracking;fixed-point parking
0? 引? 言
近年來,經濟發展十分迅速,汽車作為主要的交通工具,為人們的生活帶來便捷和舒適的同時,也帶來了環境污染、能源消耗等許多負面影響。所以,加大新能源汽車的發展力度是實現節能減排的重要途徑。但是在使用過程中發現有線充電還是存在著許多缺陷,如配套設施暫未普及、有線設備使用麻煩等[1]。于是,無線充電技術開始流行起來,國家十分重視對該項目的研究,其將為電動汽車行業提供良好的發展機遇。
無線充電技術是一種基于非直接接觸方式,實現電能由電源側傳輸至負載側的電能傳輸技術,可以擺脫傳輸線束縛,實現無線動態充電。目前電動汽車無線充電技術主要采用磁場耦合方式,原理為在汽車行駛的道路上鋪設發射線圈,使車輛在行駛過程中,由安裝于汽車底部的接收線圈接收電能,為車載儲能設備進行無線動態充電,從而提高汽車行駛距離。隨著電力電子技術、蓄電池技術以及電動汽車整車技術的進步,無線充電技術在近些年得到了迅速發展,并展現出較強優勢[2]。
為進一步加深對該技術的理解與應用,為我國節能減排事業做出貢獻,本文設計了一種電動小車動態無線充電系統,可實現小車循跡前進、定點停車等功能,并通過測試結果驗證了該系統的可行性,該系統對于無線充電系統的設計及應用具有十分重要的參考價值。
1? 方案設計
自19世紀末無線電能傳輸的概念被提出,系統的尺寸與質量、傳輸功率、傳輸距離、方向性以及能量轉換效率等一直是系統設計中需要重點考慮的因素。根據實際測試,以全車重量不小于250 g、外形尺寸不大于30 cm×26 cm、發射線圈與接收線圈之間的距離為5 mm作為初步設計條件。
本系統的結構框圖如圖1所示。
本裝置由1臺5 V的直流穩壓電源供電,輸出電流不大于1 A,并采用6節2.7 V、10 F的超級電容串聯起來作為儲能元件;以MSP430F169為核心芯片,實現小車的循跡前進、定點停車;并通過穩壓電路,供電給小車系統及MSP430F169控制核心;紅外對管檢測黑色標記,轉換為邏輯值輸入MSP430F169,進而控制小車的工作模式,實現小車的轉向與定點停車,以達到設計要求。
2? 硬件設計
2.1? 控制方案的選擇
方案一:選擇型號為MSP430F169的MCU作為控制器。MSP430F169是16-Bit RISC架構、最高運算速度8MIPS的單芯片微控制器,是具有低功耗特點的微控制器。
方案二:以數字信號處理器DSP為控制器。DSP28335內部功能結構有32位CPU、IEEE-754單精度浮點單元FPU、256 kB的Flash等存儲器。但DSP28335具有較高功耗,常用于電力電子領域。
由于該系統采用超級電容儲能,儲電量有限,在滿足設計需求的前提下,為減少電能損耗、提高用電效率,故選用方案一。
2.2? 穩壓電路方案的選擇
方案一:采用如圖2所示DC-DC穩壓電路。濾波部分采用電容濾波電路,在整流電路的輸出端(即負載電阻兩端)并聯一個電容即可構成電容濾波電路,穩壓部分采用穩壓管穩壓。該方案電路簡單、容易調試,但效率較低。
方案二:采用DC-DC升壓穩壓電路。該電路具有線性穩壓功能,不僅能夠節約板級空間,而且能夠在介于0.9 V至5.5 V的輸入電壓范圍內提供高達96%的功率轉換效率,同時該電路可生成穩定的輸出電壓,通過外部電阻分壓器或片上固定的內部電阻分壓器調整電壓。
對于該系統的設計,能量轉換效率是主要考慮的因素,為提高系統效率,故采用方案二。
2.3? 儲能元件的選擇
方案一:選擇100 F的超級電容,該電容儲能大,由超級電容的充電曲線可知,額定電容量越大的超級電容充電速度越慢。
方案二:選擇小容量的超級電容,超級電容單個耐壓值為2.7 V,小容量超級電容器具有較快的充電速度。
為使小車在系統測試中,在充電時間一定的情況下,具有較快的充電速度,使行駛距離值更大,故選擇方案二,采用小容量超級電容。小電容值雖然具有較快的充電速度,但也具有儲存電能少、放電速度快的缺點。為滿足系統正常運行、增加行駛距離,故應將電容進行串聯,使總電容儲能增大。根據多次測試,由6節10 F的超級電容串聯起來作為儲能元件,能滿足系統運行要求。
2.4? 無線充電電路設計
無線充電電路包括無線發射端電路和無線接收端電路,其中無線發射端電路設計采用BQ500212A無線電源芯片,無線接收端電路設計采用BQ51020無線電源芯片。采用無線充電發送裝置和接收裝置進行能量的傳遞,主要是為了解決傳統充電方式中有線設備使用麻煩的問題,擺脫傳輸線的束縛,實現小車的無線動態充電。根據電磁感應原理,發射線圈通電后產生磁場,小車底部的接收線圈會因此產生感應電動勢以及感應電流并儲存在儲能元件中,以供小車在定時自啟動后行駛所使用的電能。
3? 軟件設計
3.1? 程序設計流程
MCU的軟件設計思路是通過紅外對管檢測黑色標記,轉換為邏輯值輸入MSP430F169,進而控制小車的工作模式,實現轉向與定點停車。軟件處理器是MSP430F169芯片,系統軟件采用C語言開發,在IAR Embedded Workbench IDE環境下調試并實現功能。程序流程如圖3所示,進入主程序并初始化后,判斷按鍵值并執行相應的程序。軟件程序設計采用模塊化的結構,便于分析和實現功能。
3.2? 部分源程序
4? 系統測試
4.1? 測試條件
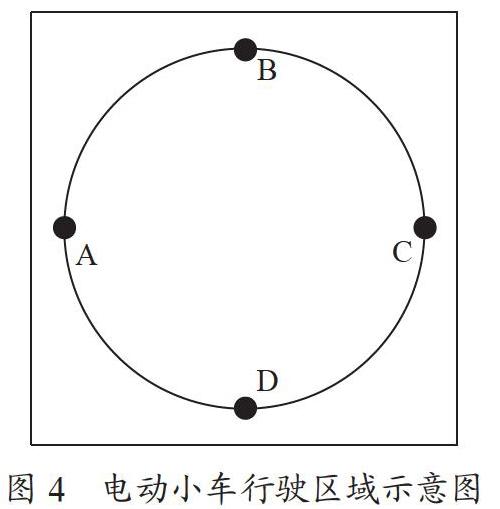
本設計測試行駛區域示意圖如圖4所示。行駛區域為標準圓形軌道,其直徑為70 cm,線寬≤2 cm,行駛引導線顏色為黑色,A、B、C、D四點是直徑為4 cm的黑色圓點,均勻分布在圓形引導線上,四點上分別安裝無線充電裝置的發射線圈。
4.2? 測試流程
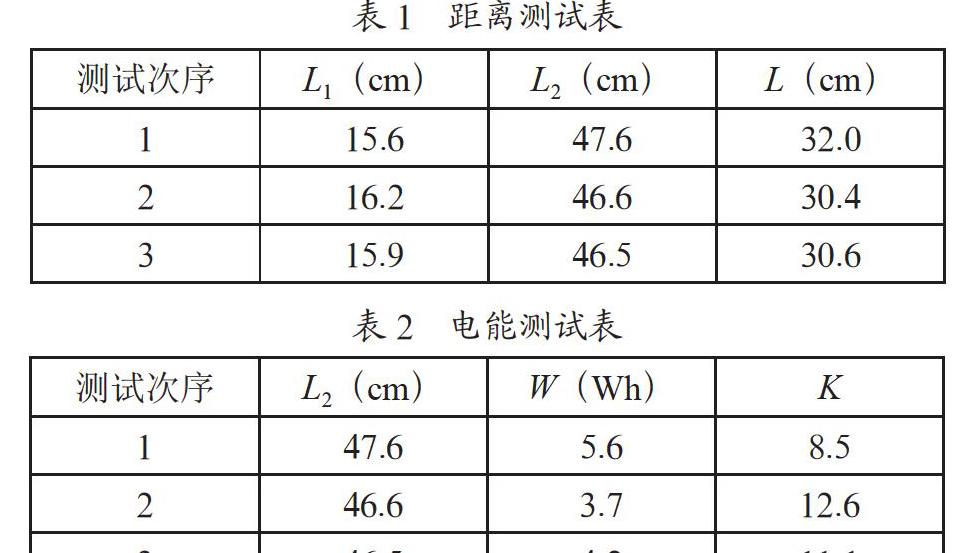
首先將小車放置在A點,接通電源充電1 min;充電結束后,小車立即起動,沿引導線行駛至B點并自動停車,進行定點停車的測試。然后進行距離測試,小車初始位置與充電時間不變,小車自啟動后,沿引導線行駛直至停車(行駛期間,4個發射線圈均不和接收線圈進行能量的傳遞),測量小車行駛距離L1。最后進行電能測試,小車初始位置與充電時間仍不變,1 min后小車自行起動,沿引導線單向行駛直至停車,行駛期間不允許停頓,且4個發射線圈輪流向接收線圈傳能,3 min時如果小車仍在行駛,則斷開電源,直至小車停車。測量小車此次行駛距離L2,計算距離差值L=L2-L1;測量直流穩壓電源在小車開始充電到停車時間段內輸出的電能W,計算K=L2/W,其中K表示消耗每Wh的電能所行駛的距離。
4.3? 測試結果
以下數據可以說明,本次設計的電動小車動態無線充電系統,各項指標均在設計范圍內,是符合要求的。距離測試表如表1所示,電能測試表如表2所示。
5? 結? 論
電動汽車行業在未來具有良好的前景,電動汽車無線充電技術更是發展迅速。為進一步加深對該技術的理解與應用,為我國節能減排事業做出貢獻,本文設計了由MSP430F169芯片、無線充電模塊、電機驅動模塊、超級電容儲能模塊和穩壓模塊五個部分組成的電動小車動態無線充電系統,距離測試以及電能測試的測試結果均驗證了該系統的可行性,故該系統對于無線充電系統的設計及應用具有十分重要的參考價值。
參考文獻:
[1] 夏晨陽,趙書澤,楊穎,等.電動汽車無線充電系統研究綜述 [J].廣東電力,2018,31(11):3-14.
[2] 高大威,王碩,楊福源.電動汽車無線充電技術的研究進展 [J].汽車安全與節能學報,2015,6(4):314-327.
作者簡介:崔子龍(1998—),男,漢族,河南商丘人,本科,研究方向:能源與動力工程(水動);朱沛康(1998—),男,漢族,河北邯鄲人,本科,研究方向:電氣工程及其自動化;李熙然(1999—),男,漢族,山東淄博人,本科,研究方向:能源與動力工程(水動)。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
通信電源技術(2018年3期)2018-06-26 06:34:18
人大建設(2018年2期)2018-04-18 12:17:00
